D 9115:2018
(1)
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 1
4 構成及び部品 ··················································································································· 4
5 安全性(性能,構造及び形状・寸法を含む。) ······································································· 4
5.1 一般 ···························································································································· 4
5.2 ブレーキ ······················································································································ 4
5.3 操縦部 ························································································································· 4
5.4 フレーム ······················································································································ 4
5.5 前ホーク ······················································································································ 4
5.6 車輪(一体車輪も含む。) ································································································ 4
5.7 クイックレリーズ装置 ···································································································· 4
5.8 タイヤ及びチューブ ······································································································· 4
5.9 駆動部 ························································································································· 4
5.10 サドル ························································································································ 4
5.11 保護装置 ····················································································································· 4
5.12 照明装置及びリフレクタ ································································································ 4
5.13 警音器 ························································································································ 5
5.14 錠 ······························································································································ 5
5.15 スタンド ····················································································································· 5
5.16 リヤキャリヤ及びフレームの静的強度 ·············································································· 5
5.17 駆動補助装置 ··············································································································· 5
5.18 組電池 ························································································································ 5
5.19 充電器 ························································································································ 5
6 製品の設計における要求事項 ······························································································ 6
7 外観······························································································································· 6
8 試験方法························································································································· 6
8.1 バッテリーランプの点灯持続時間及び光度 ·········································································· 6
8.2 駆動補助装置の強度試験 ································································································· 6
8.3 耐振性試験 ··················································································································· 6
9 検査······························································································································· 7
10 表示 ····························································································································· 7
11 取扱説明書 ···················································································································· 7
附属書A(規定)人の力を補う原動機の基準 ············································································· 8
D 9115:2018 目次
(2)
ページ
附属書B(規定)原動機の基準の細目及び時間応答性の基準 ························································· 9
附属書C(規定)製品の設計における要求事項 ········································································· 14
附属書D(規定)一充電当たりの走行距離の測定・表示方法························································ 17
D 9115:2018
(3)
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,一般財団法人自転
車産業振興協会(JBPI)から,工業標準原案を具して日本工業規格を改正すべきとの申出があり,日本工
業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格である。
これによって,JIS D 9115:2017は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
日本工業規格 JIS
D 9115:2018
電動アシスト自転車
Electric power assisted bicycles
序文
この規格は,平成21年に制定され,その後,平成25年,平成29年の“製品規格”の改正を経て今日に
至っている。
現在,電動アシスト自転車は,国・地域ごとに機能・構造・性能が大きく異なる製品が存在しているが,
我が国における“電動アシスト自転車”の安全性及び利便性の確保を図るため,安全要求事項,試験方法,
設計における要求事項などを標準化することによって,利害関係者の相互理解を深めることを目的として
改正した日本工業規格である。
なお,対応国際規格は現時点で制定されていない。
1
適用範囲
この規格は,JIS D 9111の表1(分類)で分類される電動アシスト自転車について規定する。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS C 0920 電気機械器具の外郭による保護等級(IPコード)
JIS C 8702-1 小形制御弁式鉛蓄電池−第1部:一般要求事項,機能特性及び試験方法
JIS C 8702-3 小形制御弁式鉛蓄電池−第3部:電気機器への使用に際しての安全性
JIS C 8712 ポータブル機器用二次電池(密閉型小型二次電池)の安全性
JIS C 9335-1 家庭用及びこれに類する電気機器の安全性−第1部:通則
JIS C 9335-2-29 家庭用及びこれに類する電気機器の安全性−第2-29部:バッテリチャージャの個別
要求事項
JIS C 9502 自転車用灯火装置
JIS C 60050-161 EMCに関するIEV用語
JIS D 9111 自転車−分類,用語及び諸元
JIS D 9301 一般用自転車
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS C 60050-161,JIS D 9111及びJIS D 9301によるほか,次に
よる。
2
D 9115:2018
3.1
通常の自転車
電動機によって人の力を補う装置をもたない自転車。
3.2
クランク軸回転出力(power of pedal cranking)
乗員のペダリングによって発生するクランク軸の回転出力。
3.3
駆動補助出力(assisted driving power)
電動機が駆動輪に与える回転出力。
3.4
駆動補助装置(power assisting system)
電動機などからなる駆動部,制御部,踏力検出部及び電源部によって構成され,駆動補助出力を発生さ
せる装置。
3.5
駆動補助比率(ratio of power assistance)
クランク軸回転出力に対する駆動補助出力の比率。
3.6
駆動補助機能(functions for power assistance)
駆動補助装置によって,設定された駆動補助比率に制御された駆動補助出力を発生させる機能。
3.7
駆動補助終止(stop of power assistance)
組電池の放電を終了させる制御条件のうち,駆動補助に係る電池出力電流を停止させる状態。
3.8
シャーシダイナモメータ(chassis dynamometer)
駆動輪をローラ上に設置して,ローラ回転軸に伝わる駆動トルク及びローラ回転数から駆動出力を測定
する装置。
3.9
電池(secondary cell)
電動アシスト自転車の電源として装備される二次電池。
3.10
組電池(secondary battery)
電池を用いて組み立てられた電動アシスト自転車の電源装置。
3.11
バッテリーランプ(battery lamp)
組電池を電源として用いる灯火装置(前照灯及び尾灯)。
3.12
充電器(battery charger)
電動アシスト自転車に内蔵又は附属した,組電池を充電する装置。
3.13
人こ(漕)ぎ入力(pedaling input)
3
D 9115:2018
シャーシダイナモメータ上の電動アシスト自転車に人が乗車し,ペダルを足でこぐことによって,駆動
補助装置を駆動させる方法。
3.14
パターン走行(pattern running)
シャーシダイナモメータ上で,ある走行パターンに基づいて,電動アシスト自転車を走行させること。
3.15
電子負荷装置(electronic load device)
定電流,定電圧,定電力などで組電池を放電させ,組電池の容量を計測するための装置。
3.16
環境負荷物質(substances of concern)
製品への使用などが規制されているアスベスト,六価クロム,ポリ臭素化ビフェニル(PBB),ポリ臭素
化ジフェニルエーテル(PBDE),カドミウム,水銀,鉛などの物質。
注記 労働安全衛生法,土壌汚染対策法,大気汚染防止法,化学物質の審査及び製造等の規制に関す
る法律などの国内法規,欧州議会によるRoHS指令などがある。
3.17
一充電当たりの走行距離(travel distance per charge)
電動アシスト自転車に装備する組電池を附属の充電器によって満充電にして,これを電動アシスト自転
車に用いてシャーシダイナモメータ上で駆動したとき,駆動補助機能が持続して走行できる距離。
3.18
等価慣性質量(equivalent inertia mass)
電動アシスト自転車へ人員が乗って路上を走行するときに発生する慣性力を,シャーシダイナモメータ
上で模擬するために必要な質量。この質量はシャーシダイナモメータのローラに取り付けるフライホイー
ルによって調整する。
3.19
パターン放電(pattern discharge)
ある規定のパターンで,組電池を放電させること。
3.20
満充電(full charge)
製造業者の指定する充電器で充電停止条件まで,組電池が充電された状態。
3.21
パターン放電装置(pattern discharge device)
規定の又は読み込んだ電流パターンで組電池を放電させ,組電池の容量を計測するための装置。電子負
荷装置を組み込んだシステム。
3.22
It
電池の放電電流の大きさを表す数値であり,組電池の定格容量をC5 Ahとしたとき,次の式で表される
数値。単位はアンペア(A)。
It A=C5 Ah/1h
3.23
消費電池容量(discharge capacity of the battery)
4
D 9115:2018
パターン走行又はパターン放電で,組電池が放電した容量。単位はアンペアアワー(Ah)。
3.24
消費電力量(discharge power of the battery)
パターン走行又は放電で,組電池が消費した電力量。単位はワットアワー(Wh)。
4
構成及び部品
駆動補助装置,組電池,充電器及びJIS D 9301の箇条4(構成及び部品)のほか,JIS D 9111による。
5
安全性(性能,構造及び形状・寸法を含む。)
5.1
一般
JIS D 9301の5.1(一般)による。
5.2
ブレーキ
JIS D 9301の5.2(ブレーキ)による。
5.3
操縦部
JIS D 9301の5.3(操縦部)による。
5.4
フレーム
JIS D 9301の5.4(フレーム)による。
5.5
前ホーク
JIS D 9301の5.5(前ホーク)による。
5.6
車輪(一体車輪も含む。)
JIS D 9301の5.6[車輪(一体車輪も含む)]による。
5.7
クイックレリーズ装置
JIS D 9301の5.7(クイックレリーズ装置)による。
5.8
タイヤ及びチューブ
JIS D 9301の5.8(タイヤ及びチューブ)による。
5.9
駆動部
JIS D 9301の5.9(駆動部)による。
5.10 サドル
JIS D 9301の5.10(サドル)による。
5.11 保護装置
JIS D 9301の5.11(保護装置)による。
5.12 照明装置及びリフレクタ
5.12.1 一般
照明装置及びリフレクタは,JIS D 9301の5.12(照明装置及びリフレクタ)によるほか,5.12.2による。
なお,バッテリーランプを電動アシスト自転車の灯火装置として用いる場合は,JIS C 9502に規定して
いる項目のうち,前照灯及び尾灯だけで試験可能な項目について適用する。
5.12.2 バッテリーランプ
バッテリーランプは8.1の試験を行ったとき,駆動補助終止から15分間以上,JIS C 9502の6.1.1.1(配
光特性)及び/又は6.2.1(尾灯の光度)に規定する光度を保って,点灯を持続しなければならない。
5
D 9115:2018
5.13 警音器
JIS D 9301の5.13(警音器)による。
5.14 錠
JIS D 9301の5.14(錠)による。
5.15 スタンド
JIS D 9301の5.15(スタンド)による。
5.16 リヤキャリヤ及びフレームの静的強度
JIS D 9301の5.16(リヤキャリヤ及びフレームの静的強度)による。
5.17 駆動補助装置
5.17.1 駆動補助装置の強度
駆動補助装置の駆動部のハウジングなどがフレームの一部を兼ねる場合,8.2の試験を行ったとき,各部
に破損,著しい変形及びゆがみが生じてはならない。
5.17.2 駆動補助出力
5.17.2.1 駆動補助比率
走行速度に対応する駆動補助比率は,B.2.2の試験を行ったとき,A.2 b)の規定を満たさなければならな
い。
5.17.2.2 駆動補助機能
駆動補助機能は,A.3の規定を満たさなければならない。また,B.3の試験を行ったとき,次に示す要件
を満たさなければならない。
クランク軸回転出力がゼロとなった場合,及び走行速度がA.2 c)に規定する上限速度,又はその上限速
度の範囲内で設定された駆動補助機能停止速度になった場合,電動機による駆動補助出力を発生しない。
5.17.3 改造の防止措置
A.2 d)及びB.2.3の規定を満たさなければならない。
5.17.4 耐水性
耐水性は,JIS C 0920の保護等級4(防まつ形)の耐水試験を行ったとき,電気回路などに異常がなく,
試験直後及び12時間以上放置後でもA.3の規定を満たさなければならない。
5.17.5 耐振性
耐振性は,8.3の試験を行ったとき,駆動補助装置の各部に異常な音響,緩み,破損,断線,変形などが
なく,再度車両として組み付けたときに,A.3の規定を満たさなければならない。
5.18 組電池
組電池に用いる電池は,次による。
鉛電池は,JIS C 8702-1及びJIS C 8702-3の要求事項を満たす電池とし,その他の電池は,JIS C 8712
の要求事項を満たさなければならない。
注記 電気用品安全法施行令(昭和37年8月14日政令第324号)の対象となるリチウムイオン蓄電
池は,電気用品の技術上の基準を定める省令(平成25年7月1日経済産業省令第34号)(以下,
“省令”という。)が適用される。
5.19 充電器
充電器は,JIS C 9335-1及びJIS C 9335-2-29による。
注記 充電器には,関係省令が適用される。
6
D 9115:2018
6
製品の設計における要求事項
箇条5の要求事項によるほか,製品の設計における要求事項は,附属書Cによる。
7
外観
JIS D 9301の箇条6(外観)による。
8
試験方法
8.1
バッテリーランプの点灯持続時間及び光度
バッテリーランプの点灯持続時間及び光度は,次による。
a) D.2.2で示す人こぎ入力によるパターン走行の条件及び測定準備の下でD.2.3.1又はD.2.4.1の試験方法
によって,D.3 a)の標準パターンを走行したときの電池平均電流を用いて,組電池を電子負荷装置に
接続し,駆動補助終止の条件まで放電させる。
b) 駆動補助終止の組電池に,バッテリーランプ及び駆動補助装置を接続した状態で,駆動補助終止から
15分間以上バッテリーランプを点灯させ,電池電圧を測定する。測定時の試験室内の環境温度は20 ℃
±5 ℃とする。
c) b)で測定した電池電圧を用いて,JIS C 9502の6.1.1.1で規定する前照灯又は6.2.1で規定する尾灯の
光度を測定する。
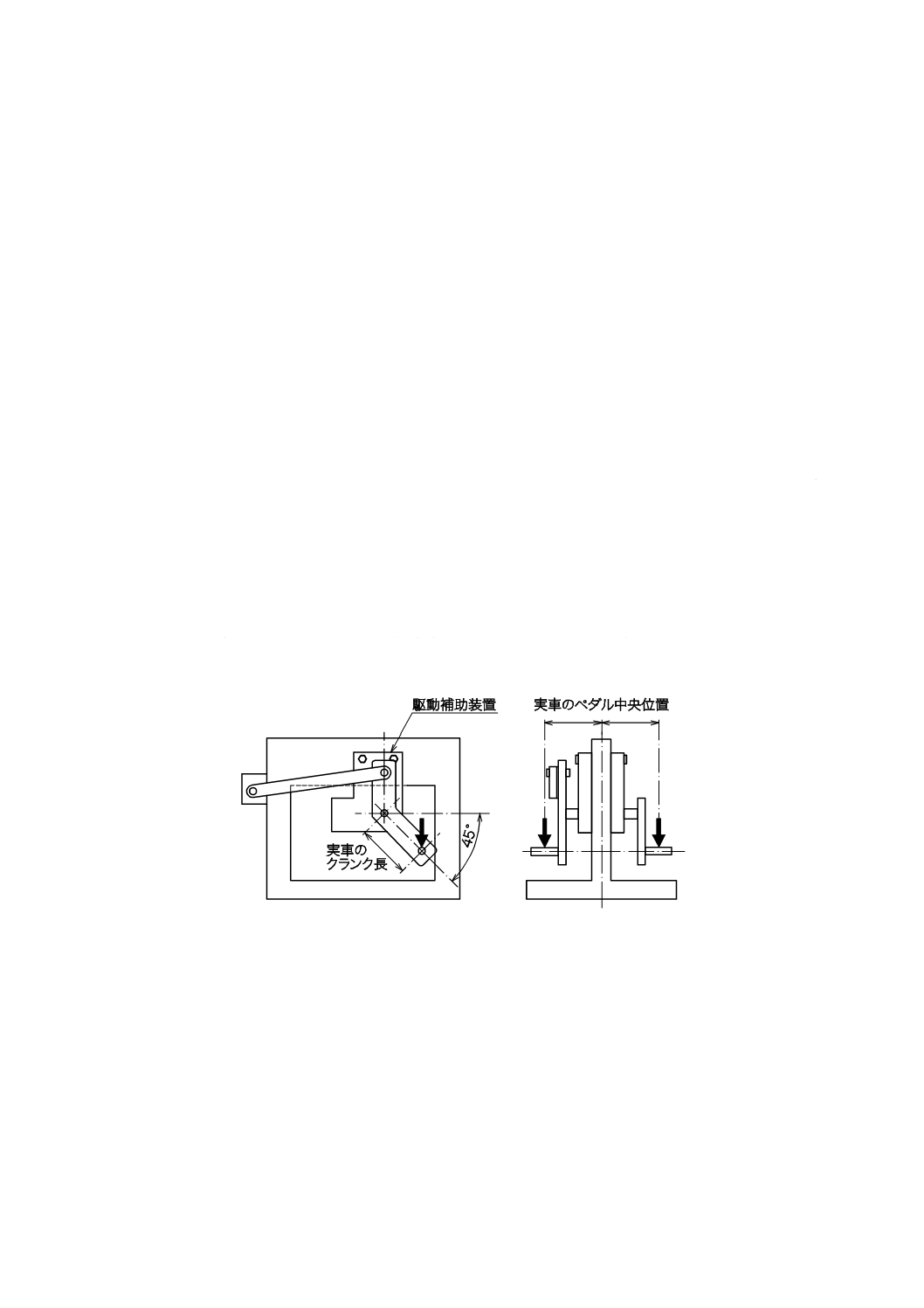
8.2
駆動補助装置の強度試験
図1のようなフレーム相当のジグ又はフレームに当該部分を取り付け,片側のペダル軸中央に下向き
1 400 Nの力を,右左で交互に75 000回(左右合わせて150 000回),又は右に75 000回,次に左75 000
回合わせて150 000回負荷する。
図1−駆動補助装置の強度試験
8.3
耐振性試験
耐振性は,駆動補助装置の各部位のうち,前ホークに取り付けられる構造のものは前ホーク又は代用の
ジグに,フレーム体に取り付けられる構造のものはフレーム体又は代用のジグにそれぞれ取り付け,前ホ
ーク,フレーム体又は代用のジグを車両としての取付け姿勢(角度)を保って,振動試験機に取り付けた
状態で,表1の振動試験を行う。
7
D 9115:2018
表1−耐振性試験条件
項目
試験条件
振動数
9 Hz〜11 Hzの間
加振部の加速度(上下方向)
20 m/s2
試験時間
2時間
9
検査
JIS D 9301の箇条8(検査)によるほか,駆動補助装置,組電池及び充電器について行う。
10 表示
JIS D 9301の箇条9(表示)による。
注記1 国家公安委員会の型式認定を得た製品は,国家公安委員会が指定した型式認定番号,製品の
製作などの時期又は時期を表す略号を表示する。
注記2 充電器は,“電気用品安全法施行規則(昭和37年8月14日通商産業省令第84号)第17条の
1の1”で定める事項を表示する。
注記3 電気用品安全法施行令の対象となるリチウムイオン蓄電池は,“電気用品安全法施行規則 第
17条の1の2”で定める事項を表示する。
11 取扱説明書
JIS D 9301の箇条10(取扱説明書)によるほか,次による。
a) 乗車・降車時の注意。
b) 一充電当たりの走行距離及び測定条件(附属書Dによる。)。
なお,この規格の附属書Dによって測定したことを表示する。
c) 組電池の充電及び充電器の取扱方法。充電器の取扱説明書は,車両本体の取扱説明書と共通でもよい。
d) 劣化組電池交換時の注意及び使用済み組電池のリサイクルに関する説明。
e) 電源スイッチの操作方法。
f)
組電池残量表示についての説明。
g) その他,必要な説明事項及び注意事項。
8
D 9115:2018
附属書A
(規定)
人の力を補う原動機の基準
A.1 概要
この附属書は,道路交通法施行規則(昭和35年総理府令第60号)第1条の3に定められた基準と同等
の内容である。
“原動機を用いて人の力を補う力”は,規格本文にて定義されている“駆動補助出力”と同義である。
“人の力に対する原動機を用いて人の力を補う力の比率”は,規格本文にて定義されている“駆動補助
比率”と同義である。
“原動機を用いて人の力を補う機能”は,規格本文にて定義されている“駆動補助機能”と同義である。
A.2 人の力を補うために用いる原動機が,次のいずれにも該当するものとする。
a) 電動機とする。
b) 24 km/h未満の速度で自転車を走行させることとなる場合において,人の力に対する原動機を用いて
人の力を補う力の比率が,次の1) 又は2) に掲げる速度の区分に応じ,それぞれ1) 又は2) に定める
数値以下とする。
1) 10 km/h未満の速度の場合は2とする。
2) 10 km/h以上,24 km/h未満の速度の場合は,走行速度をキロメートル毎時(km/h)で表した数値か
ら10を減じて得た数値を7で除したものを2から減じた数値とする。
c) 24 km/h以上の速度で自転車を走行させることとなる場合において,原動機を用いて人の力を補う力
が加わらないものとする。
d) a)〜c) のいずれにも該当する原動機については,a)〜c) のいずれかに該当しないものに改造すること
が容易でない構造とする。
A.3 電動アシスト自転車は,原動機を用いて人の力を補う機能が円滑に働き,かつ,当該機能が働くこ
とによって安全な運転の確保に支障を生じるおそれがあってはならない。
9
D 9115:2018
附属書B
(規定)
原動機の基準の細目及び時間応答性の基準
B.1
概要
この附属書は,原動機の基準の細目及び時間応答性の基準について規定するもので,平成29年10月30
日付警察庁交通局長通達(警察庁丙交企発第144号)の別添3に定められた国家公安委員会が行う駆動補
助機付自転車(以下,車両という。)の型式認定基準と同等の内容である。
“駆動補助機付自転車”は,規格本文にて定義されている“電動アシスト自転車”と同義である。
“駆動補助力の比率”は,規格本文にて定義されている“駆動補助比率”と同義である。
B.2
原動機の基準
B.2.1 一般事項
電動機以外の原動機を備えていてはならない。
B.2.2 駆動補助力の比率
B.2.2.1 検査条件
検査を行う車両,電源及び計測機の条件は,次のとおりとする。
a) 車両の準備及び整備 車両について定められた整備基準に基づき,検査開始前に本来の用い方によっ
て運転することが可能な状態に整備しておく。タイヤ空気圧は,タイヤ側面,取扱説明書などに記載
されている最大空気圧(標準空気圧又はメーカー推奨値が記載されている場合は,当該標準空気圧又
はメーカー推奨値)とする。
b) 電源 バッテリーは,検査前に満充電状態にしておく。
c) 計測機(シャーシダイナモメータ) シャーシダイナモメータは精度を確認したもので,シャーシダイ
ナモメータの製造業者の定める取扱要領に基づいて点検,整備及び校正されたものを用いる。検査に
先立ち15 km/hで30分以上の暖機運転を行っておき,検査開始前に安定した運転が可能な状態にして
おく。シャーシダイナモメータ内部の摩擦抵抗などで生じる損失については,検査前に惰行試験又は
モータ駆動の方法で計測し,車両の駆動出力を補正するものとする。補正の量は求める量の5 %以内
とする。
d) タイヤ押し圧の設定 タイヤに適切な押し圧を加えるために,サドルの代わりに50 kgのおもりを載
せ,その質量がタイヤの押し圧としてシャーシダイナモメータのローラ上に加わるように車両及び車
両支持ジグを設置する。
e) 変速装置 変速装置をもつ車両については,駆動補助力の比率の範囲が最大となる変速位置において
検査する。
f)
検査に係る負荷の設定 表B.1〜表B.4に示す設定条件-1及び設定条件-2の走行速度及び車輪駆動力
の目標値にそれぞれ負荷を設定する。車輪駆動力は,シャーシダイナモメータの損失を含めた値が各
設定条件で定められた値となるようにする。
B.2.2.2 測定方法及び計算式
測定方法及び計算式は,次による。
a) 測定事項,測定要領及び測定単位
10
D 9115:2018
1) クランク軸入力回転速度:N
− クランク軸駆動装置の回転速度を使用する。
− 単位はmin−1で表す。
2) 入力トルク:T
− クランク軸駆動装置の軸トルクを使用する。
− 単位はニュートンメートル(N・m)で表す。
3) 走行速度:V
− シャーシダイナモメータの回転数検出器の出力から求めた走行速度を使用する。
− 単位はキロメートル毎時(km/h)で表す。
4) 車輪駆動力:F
− シャーシダイナモメータのトルク検出器の出力から求めた駆動力を使用する。
− シャーシダイナモメータの損失を含めた値とする。
− 単位はニュートン(N)で表す。
b) 計算式
1) クランク軸回転出力:P1
P1=0.105×N×T
P1: クランク軸回転出力(W)
N: 入力回転速度(min−1)
T: 入力トルク(N・m)
2) 車両の駆動出力:P2
P2=0.278×V×F
P2: 車両の駆動出力(W)
V: 走行速度(km/h)
F: 車輪駆動力(N)
3) 駆動補助力の比率:α
α=(P2−P1)/P1
α: 駆動補助力の比率
P1: クランク軸回転出力(W)
P2: 車両の駆動出力(W)
なお,小数第2位(小数第3位四捨五入)までを表す。
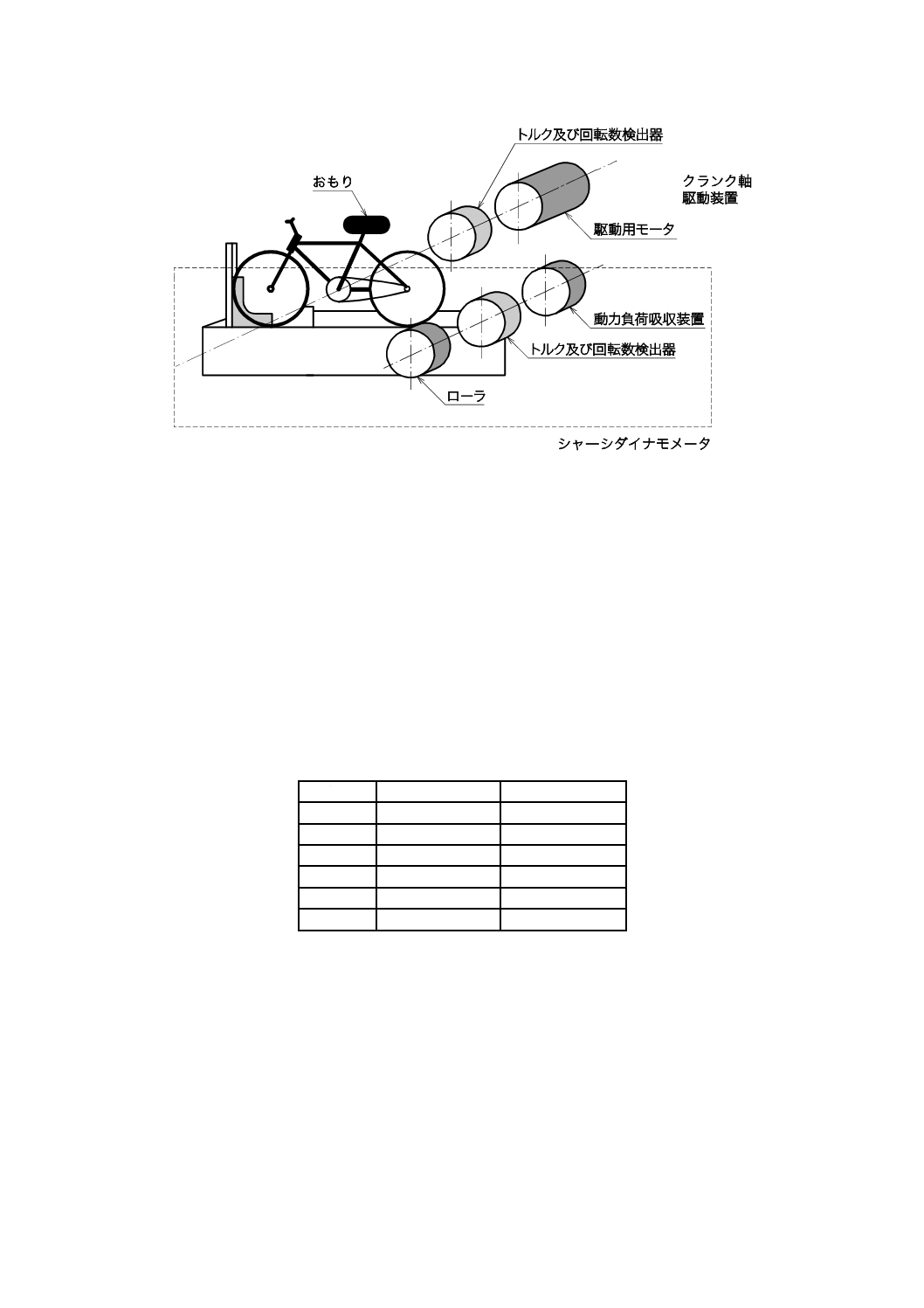
B.2.2.3 駆動補助力の比率検査装置の概観図
駆動補助力の比率検査装置の概観図は,図B.1による。
11
D 9115:2018
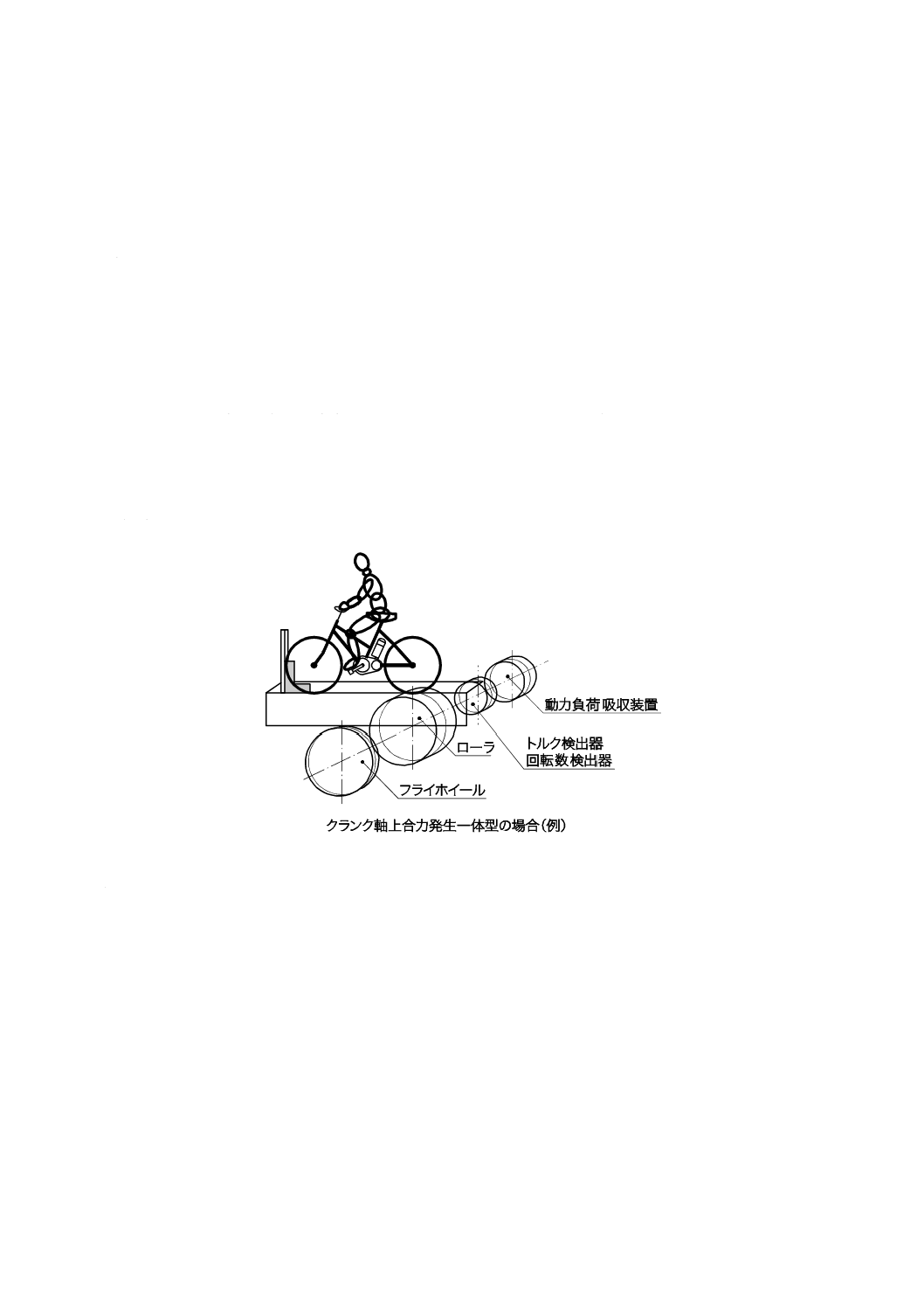
図B.1−駆動補助力の比率検査装置の概観図(モータ駆動輪が後輪の場合)
人間がペダルをこぐ代わりに駆動用モータ並びにトルク及び回転数検出器で構成されるクランク軸駆動
装置を用い,クランク軸を回転させ,その入力回転速度及び入力トルクを計測する。
一方,駆動輪をシャーシダイナモメータのローラに接地させ,シャーシダイナモメータのトルク及び回
転数検出器で車両の走行速度及び車輪駆動力を計測する。
なお,モータ駆動輪が前輪の場合などの車両を計測するときは,計測状況がモータ駆動輪が後輪の場合
と同じになるように駆動輪をローラに接地させる。
B.2.2.4 検査負荷設定
検査を行う負荷設定は,次による。
a) 設定条件-1(表B.1及び表B.2を参照。)
表B.1−緩やかな上り勾配の走路を走行する場合の負荷状態
測定番号
目標走行速度
目標車輪駆動力
1
5 km/h
30 N
2
10 km/h
33 N
3
V1 km/h
F1 N
4
V2 km/h
F2 N
5
24 km/h
52 N
6
28 km/h
61 N
測定番号3及び測定番号4の点において,検査時に11 km/h〜23 km/hの間で任意に指定されたV1及び
V2に対するF1及びF2は,表B.2による。
12
D 9115:2018
表B.2−測定番号3及び測定番号4で任意に指定された目標走行速度に対する目標車輪駆動力
目標走行速度
目標車輪駆動力
11 km/h
34 N
12 km/h
35 N
13 km/h
36 N
14 km/h
37 N
15 km/h
38 N
16 km/h
40 N
17 km/h
41 N
18 km/h
42 N
19 km/h
44 N
20 km/h
45 N
21 km/h
47 N
22 km/h
49 N
23 km/h
50 N
b) 設定条件-2(表B.3及び表B.4を参照。)
表B.3−急な上り勾配の走路を走行する場合の負荷状態
測定番号
目標走行速度
目標車輪駆動力
7
5 km/h
55 N
8
10 km/h
58 N
9
V3 km/h
F3 N
10
V4 km/h
F4 N
11
24 km/h
77 N
12
28 km/h
85 N
測定番号9及び測定番号10の点において,検査時に11 km/h〜23 km/hの間で任意に指定されたV3及び
V4に対するF3及びF4は,表B.4による。
表B.4−測定番号9及び測定番号10で任意に指定された目標走行速度に対する目標車輪駆動力
目標走行速度
目標車輪駆動力
11 km/h
59 N
12 km/h
60 N
13 km/h
61 N
14 km/h
62 N
15 km/h
63 N
16 km/h
64 N
17 km/h
65 N
18 km/h
67 N
19 km/h
68 N
20 km/h
70 N
21 km/h
72 N
22 km/h
73 N
23 km/h
75 N
B.2.2.5 検査手順
この検査は次の手順で行う。
13
D 9115:2018
a) シャーシダイナモメータ内部の摩擦抵抗などの損失の計測を行う。
b) バッテリーを装着した車両をシャーシダイナモメータ台上に載せ,車両のクランク軸をクランク軸駆
動装置と接続する。
c) 検査車両の駆動補助装置の電源スイッチを入れ,駆動補助力の比率が最大となる走行モードに設定す
る。
d) クランク軸駆動装置及び動力負荷吸収装置を起動し,走行速度及び車輪駆動力をそれぞれ目標値付近
で安定させる。
e) 各測定事項を検査成績書に記録する。記録の際の車輪駆動力は,目標値の±5 %以内,走行速度は目
標走行速度が10 km/h未満の場合は目標値の±5 %以内,10 km/h以上の場合は目標走行速度±0.5 km/h
以内とする。
B.2.3 改造の容易でない構造
改造の容易でない構造は,次による。
a) 電源スイッチ,人力及び車速の測定手段,電動モータ及びその制御手段並びにそれらを結ぶ配線類は
外部から容易に改造できない構造であるものとする。
b) 市販部品と交換することによって,容易にA.2 b) の基準を超えるような改造のできない構造であるも
のとする。
なお,a)及びb)については,書面による確認,分解検査などによって行うものとする。
B.3
時間応答性の基準
B.3.1 基準に係る検査
基準に係る検査は,次による。
a) 検査条件
1) 車両の準備及び整備 検査開始前に本来の用い方によって運転することが可能な状態に整備してお
く。
2) 乗員などの質量 乗員も含め50 kg〜80 kgの範囲で検査する。
3) 走路 平たん(坦)路及び登坂路(勾配は2°〜4°)において検査する。
b) 測定方法
1) 検査事項
− 運転操作 一般の自転車と同様な運転操作であることを確認する。
− ペダリング感覚 一般の自転車と同様なペダリング感覚であることを確認する。
2) 検査要領 発進,加速,定常,減速,惰行及び停止の各運転態様を組み合わせて走行し,各運転態
様のつながり,時間応答性の速やかさ,短時間でも自走しないこと及び制動装置によって安全かつ
確実に停止できることを確認する。
c) 検査手順 次の手順で運転操作及びペダリング感覚の検査を行う。
1) 停止した状態からの発進
2) 10 km/h未満の速度の走行
3) 10 km/h以上24 km/h未満の速度の走行
4) 24 km/h以上の速度の走行
14
D 9115:2018
附属書C
(規定)
製品の設計における要求事項
C.1 一般
この附属書は,電動アシスト自転車の安全性及び利便性を確保するために必要な,設計上の要件を規定
する。
C.2 駆動補助装置
C.2.1 基本構造及び運転操作方法
電動アシスト自転車の基本構造及び運転操作方法は,駆動補助装置を除き,通常の自転車とおおむね同
じであることが望ましい。
駆動補助装置が働くことによって,安全な運転の確保に支障が生じるおそれがない構造でなければなら
ない。
C.2.2 駆動補助出力
駆動補助出力は,次による。
a) 人力によるクランク軸回転出力を検知する装置,電動機の出力を正確に制御する装置などを備え,附
属書Aに規定する走行速度及び駆動補助比率に関する基準を逸脱しないよう管理できる構造とする。
b) 経年変化によって駆動補助比率などが,附属書Aに規定する基準を逸脱しない構造とする。
c) 人力によるクランク軸回転出力に対して電動機が速やかに応答し,クランク軸回転出力に応じて電動
機の出力が滑らかに増減することによって,人の力を補う機能が円滑に働き,安全な運転の確保に支
障が生じるおそれがない構造とする。
d) 走行する道路の勾配,積載重量の大きさなどによる乗員のペダリング運動負荷,体力的状態などに応
じて,駆動補助比率を選択又は自動調整できる構造であることが望ましい。
C.2.3 部品の強度
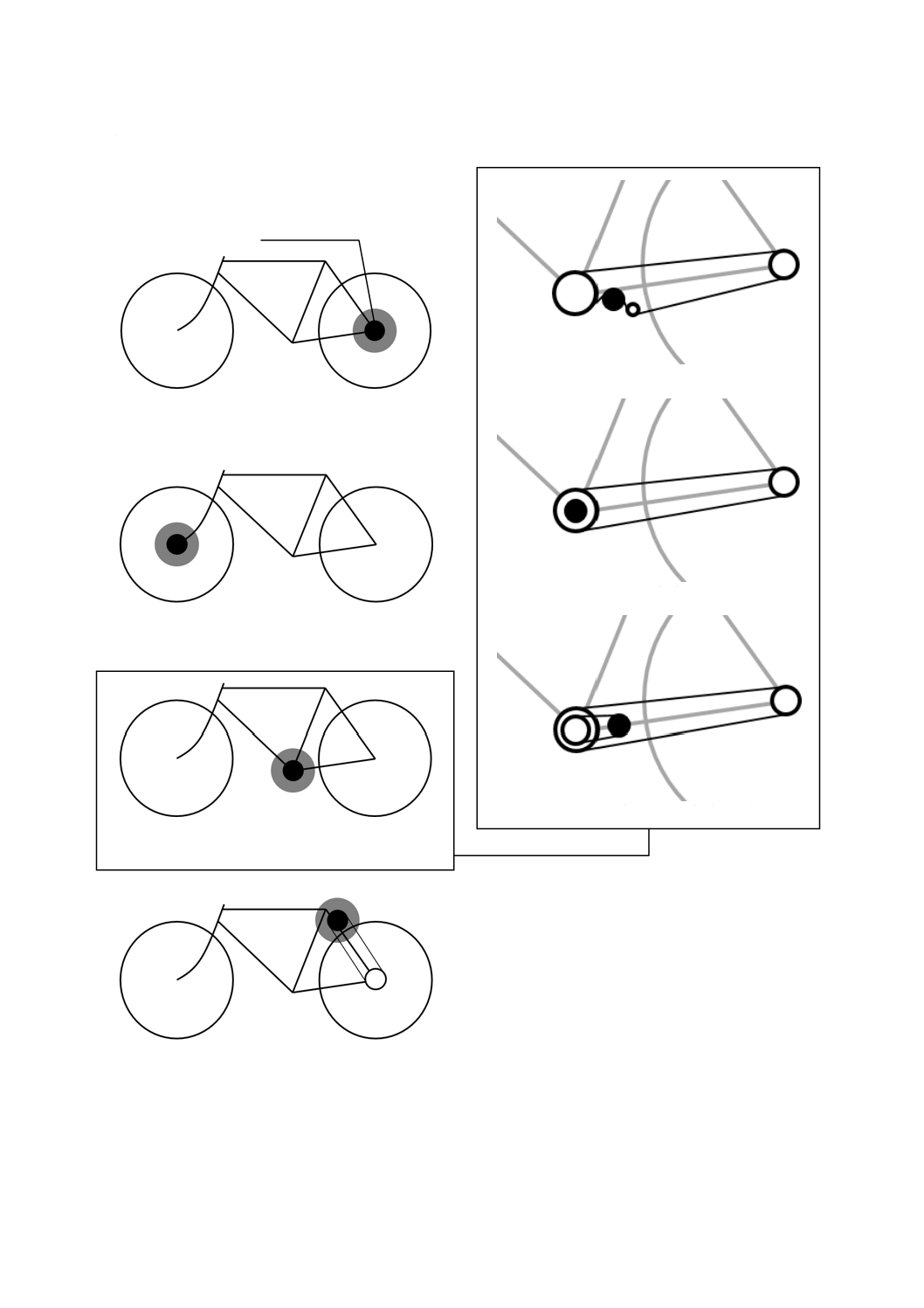
図C.1の駆動補助装置の種類(クランク軸上合力発生一体型,後車軸合力発生型,人力・電動力別車輪
発生型,モータ別体後輪駆動方式など)に応じて,駆動補助力の増加分を考慮した十分な強度及び耐久性
を確保しなければならない。
その他,電動アシスト自転車に使用する部品で,使用用途及び構造によって通常の自転車より多くの負
荷がかかると想定されるものについては,十分な強度及び耐久性を確保しなければならない。
C.3 異常・故障時の措置
駆動補助装置は,駆動補助装置の異常などを検知した場合に,自動的に停止するなどの機能を組み込ま
なければならない。
C.4 駆動補助装置の電源
車両が一定以上の時間使用されない場合には,自動的に電源を遮断する構造であることが望ましい。
15
D 9115:2018
C.5 電気ケーブル及び接続部品
電気ケーブル及び接続部品は,次による。
a) 電気回路の配線などは,設定された最大電流の通電によって,異常な発熱などによる支障を生じては
ならない。
b) 電気回路の配線などは,降雨にさらされても駆動補助機能に支障を生じてはならない。
C.6 組電池
組電池は,次による。
a) 組電池は,充電器と車両との組合せにおいて安全性及び適合性が確認され,過充電,異常な発熱及び
短絡の防止機構が織り込まれていなければならない。
b) 組電池は,車両に取り付けられた状態で外郭が降雨にさらされても内部の配線などが電気的に支障を
生じない防水性,耐湿性及び耐食性をもつとともに,異常な発熱などによる支障を生じてはならない。
c) 組電池は,施錠装置を伴う構造で車両に搭載されることが望ましい。
d) 組電池の残量を表示する機能を備えなければならない。
C.7 充電器
充電器は,次による。
a) 組電池が電動アシスト自転車から取り外された状態で充電を行う構造の場合,充電器は,組電池との
組合せにおいて安全性及び適合性が確認され,過充電,異常な発熱及び短絡の防止機構が織り込まれ
ていなければならない。
b) 組電池が電動アシスト自転車に内蔵又は搭載された状態で充電を行う構造の場合,充電器は,組電池
と車両との組合せにおいて安全性及び適合性が確認され,過充電,異常な発熱及び短絡の防止機構が
織り込まれていなければならない。
C.8 電磁両立性
充電器は,通常の使用環境において正常な機能を維持するイミュニティ(妨害に対する)を確保し,過
度な電磁妨害を発しない構造としなければならない。
車両は,通常の使用環境において正常な機能を維持するイミュニティ(妨害に対する)を確保し,過度
な電磁妨害を発しない構造とすることが望ましい。
注記 充電器には,関係省令が適用される。
C.9 資源の有効利用などへの配慮
製品の構成部品及び使用材料については,製品及び部品の長寿命化,再利用の容易化,省資源化並びに
環境負荷物質の使用回避又は減量に配慮しなければならない。
使用済み電池のリサイクル処理のため,廃棄時に車両から組電池を容易に取り外しできる構造とする。
製品に使用する組電池は,産業廃棄物となった使用済み電池の回収,保管,運搬及びリサイクル処理の体
制が整えられた電池製造・輸入業者が供給する製品を用いる。
C.10 リスクアセスメントによる設計
製造業者は,最も適切なリスクアセスメント手法を確立し,適切なリスクアセスメントを実践すること
16
D 9115:2018
が望ましい。
後車軸合力発生型
(ハブモータ後輪駆動方式)
人力・電動力別車輪発生型
(ハブモータ前輪駆動方式)
クランク軸上合力発生一体型
(センターモータ駆動方式)
モータ別体後輪駆動方式
モータ,人力別軸チェーン合力一体式
モータ,人力同軸合力一体式
モータ,人力別軸クランク軸合力一体式
図C.1−駆動補助装置の種類
駆動補助装置
17
D 9115:2018
附属書D
(規定)
一充電当たりの走行距離の測定・表示方法
D.1 一般
この附属書は,一充電当たりの走行距離について,シャーシダイナモメータを用いた人こぎ入力によっ
て測定する方法及び表示方法について規定する。
D.2 一充電当たりの走行距離の測定方法
D.2.1 一般
一充電当たりの走行距離の測定方法のうち,D.2.3又はD.2.4は,装置に合わせてどちらで行ってもよい。
D.2.2 人こぎ入力によるパターン走行の条件及び測定準備
D.2.2.1 シャーシダイナモメータ
シャーシダイナモメータを,次の設定によって走行負荷として用いる。シャーシダイナモメータ及び人
こぎの概念図を図D.1に示す。
図D.1−シャーシダイナモメータの概念図
a) シャーシダイナモメータ及びその附属装置は,精度を確認したもので,シャーシダイナモメータの製
造業者の定める取扱要領に基づいて点検,整備及び校正されたものを用いる。
b) シャーシダイナモメータに設定する等価慣性質量は,測定に供する電動アシスト自転車の質量に65 kg
(乗車人員の体重を想定した質量)を加えた質量の値に応じて,表D.1の標準値に設定する。
18
D 9115:2018
表D.1−等価慣性質量の標準値
単位 kg
供試自転車の質量+65
等価慣性質量の標準値
73.75超〜 76.25以下
75
76.25超〜 78.75以下
77.5
78.75超〜 81.25以下
80
81.25超〜 83.75以下
82.5
83.75超〜 86.25以下
85
86.25超〜 88.75以下
87.5
88.75超〜 91.25以下
90
91.25超〜 93.75以下
92.5
93.75超〜 96.25以下
95
96.25超〜 98.75以下
97.5
98.75超〜 101.25以下
100
101.25超〜 103.75以下
102.5
103.75超〜 106.25以下
105
106.25超〜 108.75以下
107.5
108.75超〜 111.25以下
110
c) シャーシダイナモメータから電動アシスト自転車の駆動輪に加える走行抵抗は,式(D.1)によって算出
し,設定する。
F=R+0.027V2+9.8Wsinθ ························································· (D.1)
ここに,
F: 走行抵抗(N)
V: 速度(km/h)
W: 等価慣性質量の標準値(kg)
θ: 登坂角度(°)
R: 転がり抵抗(N)。シャーシダイナモメータのローラ上に設置
しない車輪1本当たりの転がり抵抗を2.6とする。
0.027: 空気抵抗係数
d) 測定前におけるシャーシダイナモメータの暖機運転は,等価慣性質量の設定をした後,電動アシスト
自転車を設置し,組電池を付けず,駆動補助なしで,15 km/hで30分間以上行う。
D.2.2.2 乗員
パターン走行を行う乗員は,体重65 kg以上70 kg以下であり,かつ,D.2.2.4のペダル入力を継続でき
る能力をもつ人とする。一連の測定の間,できる限り一人の乗員でパターン走行を行う。
乗員の体重が65 kgに満たない場合は,電動アシスト自転車のサドル付近におもりを付けて,車載質量
(乗員とおもりとの合計)が65 kg以上70 kg以下になるように調整しなければならない。
D.2.2.3 測定条件,車両などの準備
測定条件,車両などの準備は,次による。
a) 試験室内の環境温度は,20 ℃±5 ℃とする。
b) 組電池は,新品又は新品と同等のものを用いる。
c) ヘッドライトは,消灯状態とする。
d) タイヤ空気圧,チェーン張りなどを,製造業者の定めた値に設定する。
e) D.2.3.1の測定を行う場合は,組電池出力端子と駆動装置との間の電線を延長して,電流検出装置(ク
ランプ式電流センサなど)を設置する。これを,波形記録分析装置(データアナライザ,アナライジ
ングレコーダなど)に接続する。電線は,電圧降下の影響ができる限り小さくなるものを用いる。
19
D 9115:2018
f)
D.2.4.1の測定を行う場合は,組電池出力端子に電圧検出装置(電圧検出用電線),更に組電池出力端
子と駆動装置との間の電線を必要に応じて延長して,電流検出装置(クランプ式電流センサなど)を
取り付け,それぞれを波形記録分析装置に接続する。電線は,電圧降下の影響ができる限り小さくな
るものを用いる。
g) シャーシダイナモメータ上に,試験に供する電動アシスト自転車を設置する。
h) 電動アシスト自転車の駆動装置に,走行速度に相当する冷却風を前面から与える。
D.2.2.4 シャーシダイナモメータでの走行
シャーシダイナモメータ上のパターン走行は,表D.4及び表D.5の走行パターンを,1サイクル以上の
サイクル単位で走行する。また,表D.6の条件では,最低1 km以上走行する。
パターン走行は,次に示す手順で行う。
a) D.2.3.1 c)又はD.2.4.1 c)までの方法で約1/2の容量にした組電池を電動アシスト自転車に装着する。
b) 乗員が電動アシスト自転車に乗り,スイッチを起動し,測定しようとする走行モードに設定する。
c) 変速装置を表D.4及び表D.5に示す変速段数に設定する。
d) シャーシダイナモメータのローラ速度が表D.4及び表D.5の速度になるよう,ペダルをこぎ始める。
e) 停止後の発進は,3こぎ〜4こぎ又は5秒間程度で目標速度になるように加速する。
f)
平たん路及び上り坂では,速度変動を±1 km/h以下に抑えるよう一定のペースでペダルをこぐ。速度
変動が±1 km/hを超えるときが全体の10 %を超える場合は,そのデータを採用しない。
g) 停止の場合は,ペダリングを止め,制動装置を使って徐々に制動し,20 m以下の停止距離で停止する。
h) 下り坂では,発進して目標速度になった後,制動装置で間欠的な制動を行い,±20 %以下の変動幅で
目標速度を維持する。ブレーキ温度が過度に高くなる場合は,1 kmの途中に数回の停止を入れて,ブ
レーキを冷却してもよい。
i)
変速は停止時に行う。走行しないと変速できない変速機(外装変速機など)の場合は,停止後電源を
切って,走行しながら変速を完了した後,停止して電源を入れ,再び発進する。
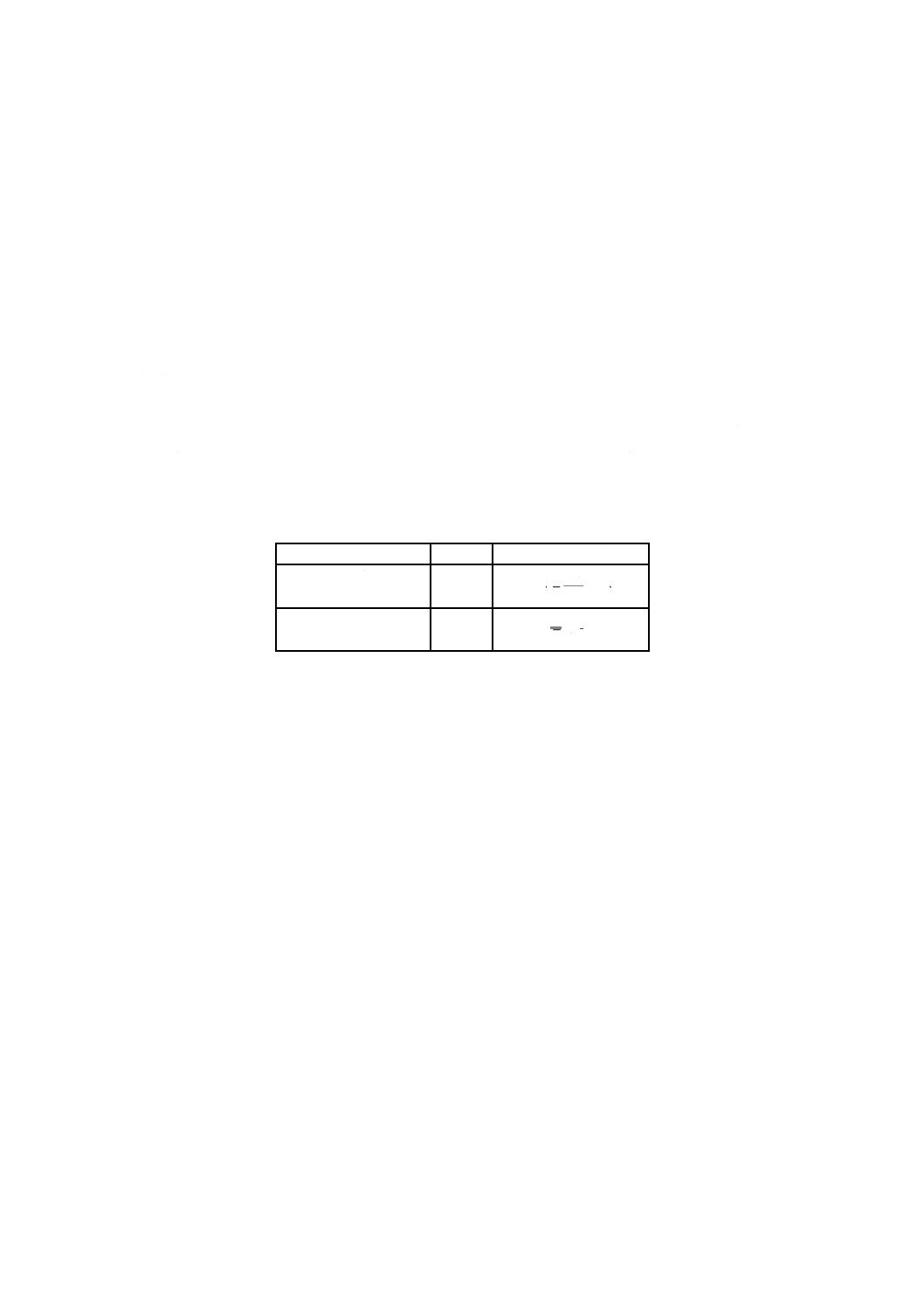
D.2.3 パターン走行時の消費電池容量及びパターン放電による電池容量の測定によって走行距離を求め
る方法
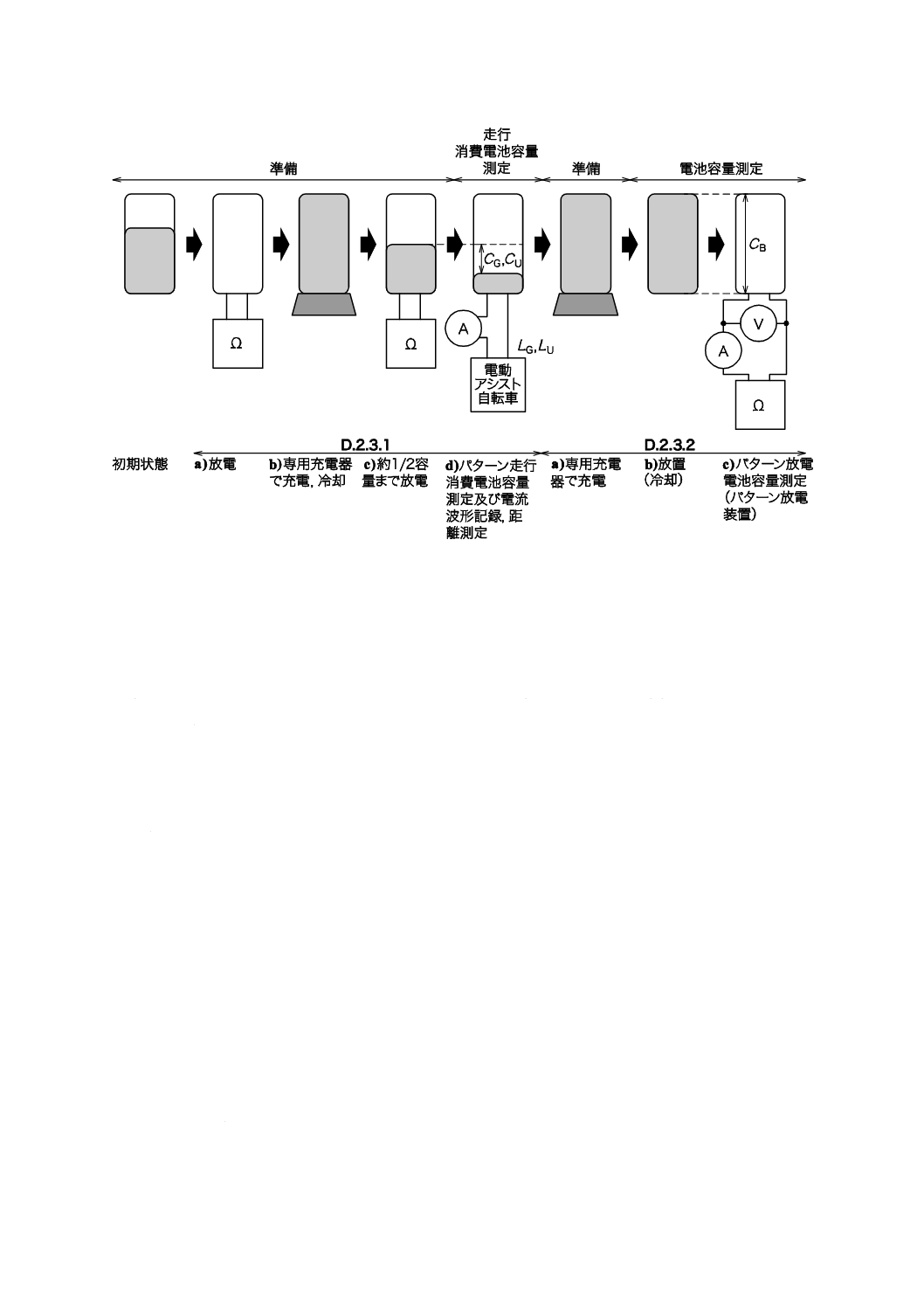
D.2.3.1 人こぎ入力による走行及び消費電池容量の測定
シャーシダイナモメータ上でパターン走行を行い,消費電池容量を測定し,その時測定した電流波形を
用いてパターン放電装置で電池容量を測定する方法の手順を,図D.2に示す。
20
D 9115:2018
図D.2−パターン放電による電池容量の測定手順
シャーシダイナモメータ上でパターン走行を行い,電池出力電流及び消費電池容量を測定する方法につ
いては,次のように行う。
a) 電動アシスト自転車から組電池を外し,電子負荷装置に接続し,放電電流1 It Aで駆動補助終止条件
まで放電を行う。
b) 専用充電器で満充電まで充電する。充電後,満充電で1時間以上放置して冷却させる。
c) 約1/2の容量まで1 It Aの電子負荷装置で放電する。
d) 約1/2容量の組電池を電動アシスト自転車に取り付け,シャーシダイナモメータ上で,表D.4及び表
D.5の場合は1サイクル以上サイクル単位で,表D.6の場合は最低1 km,D.2.2.4の要領で走行する。
約1/2容量から走行できる距離が表D.4若しくは表D.5で1サイクル又は表D.6で1 kmに満たない
場合は,1サイクル又は1 kmを走行できる容量から駆動補助終止までとする。
この間,電流検出装置及び波形記録分析装置で電池出力電流及び車速を測定・記録する。測定のサ
ンプリング時間は100 ms以下とする。
記録した車速がD.2.2.4 f)の要件を満たさない箇所が10 %を超えても,波形エディタなどで安定した
波形部分を取り出し,組み換え作成したものを使用してもよい。ただし,組み換える範囲は,全体の
40 %を超えてはならない。それ以上の範囲でD.2.2.4 f)の要件を満たさない場合は,そのデータを採用
しない。
ここで,標準パターンで走行した距離をLG[単位:キロメートル(km)]とする。LGは,1サイク
ルの場合4 km,2サイクルの場合8 kmとなる。4°登坂連続パターンで走行した距離をLU[単位:キ
ロメートル(km)]とする。LUの値は,小数点以下第2位を四捨五入する。
e) d)で測定した電流値は,波形記録分析装置で積算処理を行い,走行した距離LG又はLUに対応する消
費電池容量を算出する。回生充電機能をもつ車両の場合は,充電した電池容量を負の値として,消費
電池容量を合計する。
21
D 9115:2018
ここで,標準又は低速パターンの消費電池容量をCG[単位:アンペアアワー(Ah)],4°登坂連続
パターンの消費電池容量をCU[単位:アンペアアワー(Ah)]とする。CG及びCUの値は,小数点以
下第3位を四捨五入する。
D.2.3.2 パターン放電による電池容量の測定
D.2.3.1 d)で記録した電池出力電流を使って,パターン放電で電池容量を測定する手順は次による。
a) 専用充電器を用いて充電停止になるまで充電する。
b) 満充電になった組電池を,1時間以上放置して冷却させる。
c) 組電池にパターン放電装置を接続し,標準又は低速パターンの電流波形で,製造業者が指定した駆動
補助終止条件になるまで放電する。このときの消費電池容量を,電池容量CB[単位:アンペアアワー
(Ah)]とする。
D.2.3.3 一充電当たりの走行距離の算出
D.2.3.1及びD.2.3.2の測定値を用いて,表D.2のように一充電当たりの走行距離(km)を算出する。走
行距離の計算値は,小数点以下第1位を四捨五入する。ただし,走行距離の計算値が10 km未満の場合は,
小数点以下第2位を四捨五入する。
表D.2−一充電当たりの走行距離の計算(パターン放電による場合)
走行パターンの種類
記号
走行距離の計算式
標準
低速
DG
G
G
B
G
L
C
C
D
×
=
4°登坂連続
DU
U
U
B
U
L
C
C
D
×
=
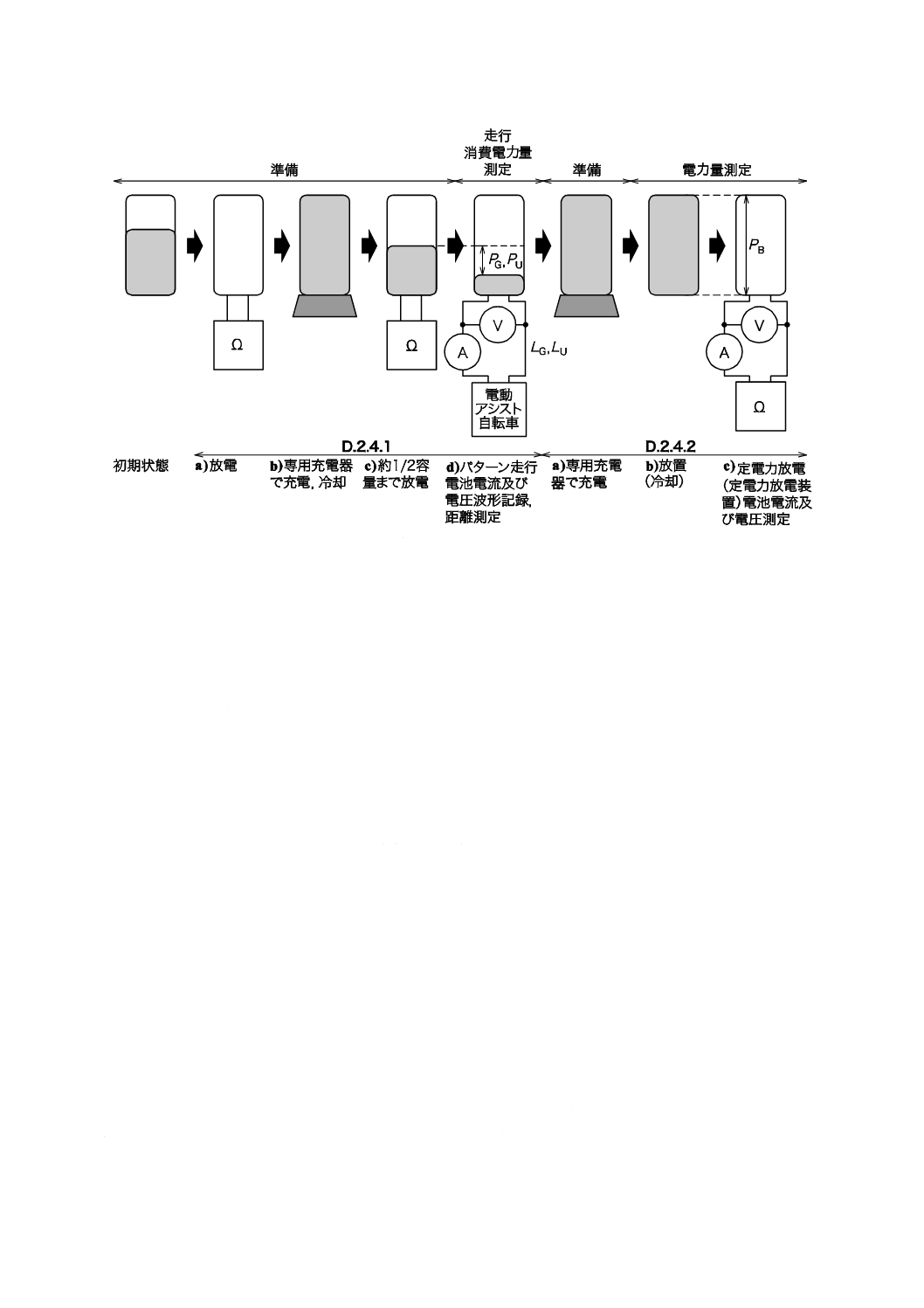
D.2.4 パターン走行時の消費電力量及び定電力放電による電池電力量の測定によって走行距離を求める
方法
D.2.4.1 人こぎ入力による走行及び消費電力量の測定
シャーシダイナモメータ上でのパターン走行時の消費電力量及び電子負荷装置を使って満充電からの電
力量を測定する手順を,図D.3に示す。この方法は,パターン放電装置がない場合の方法として有用であ
る。
22
D 9115:2018
図D.3−消費電力量及び定電力放電による電池電力量の測定手順
シャーシダイナモメータ上でパターン走行を行い,消費電力量を測定する方法については,次のように
行う。
a) 電動アシスト自転車から組電池を外し,電子負荷装置に接続し,放電電流1 It Aで,駆動補助終止条
件まで放電を行う。
b) 専用充電器で満充電まで充電する。充電後,満充電で1時間以上放置して冷却させる。
c) 組電池に電子負荷装置を接続し,放電電流1 It Aで,約1/2の容量まで放電する。
d) 約1/2容量の組電池を電動アシスト自転車に取り付け,シャーシダイナモメータ上で,表D.4及び表
D.5の場合は1サイクル以上サイクル単位で,表D.6の場合は最低1 km以上,D.2.2.4の要領で走行す
る。約1/2容量から走行できる距離が表D.4若しくは表D.5で1サイクル又は表D.6で1 kmに満たな
い場合は,1サイクル又は1 kmを走行できる容量から駆動補助終止までとする。
回生充電機能のない電動アシスト自転車の場合,c)及びd)の上記までの操作の代わりに,b)で満充
電にして冷却した組電池を電動アシスト自転車に取り付け,D.2.2.4の要領で走行してもよい。
この間,電流検出装置,電圧検出装置及び波形記録分析装置で電池出力電流,電圧及び車速を測定・
記録する。測定のサンプリング時間は,100 ms以下とする。
記録した車速がD.2.2.4 f)の要件を満たさない箇所が10 %を超えても,波形エディタなどで安定した
波形部分を取り出し,組み換え作成したものを使用してもよい。ただし,組み換える範囲は,全体の
40 %を超えてはならない。それ以上の範囲でD.2.2.4 f)の要件を満たさない場合は,そのデータを採用
しない。
ここで,標準パターンで走行した距離をLG[単位:キロメートル(km)]とする。LGは,1サイク
ルの場合4 km,2サイクルの場合8 kmとなる。4°登坂連続パターンで走行した距離をLU[単位:キ
ロメートル(km)]とする。LUの値は,小数点以下第2位を四捨五入する。
e) d)で測定した電流及び電圧は,波形記録分析装置で積算処理を行い,走行した距離LG又はLUに対応
する消費電力量を算出する。回生充電機能をもつ車両の場合は,充電した電池電力量を負の値として,

23
D 9115:2018
消費電力量を合計する。
ここで,標準又は低速パターンの消費電力量をPG[単位:ワットアワー(Wh)],4°登坂連続パタ
ーンの消費電力量をPU[単位:ワットアワー(Wh)]とする。PG及びPUの値は,小数点以下第3位
を四捨五入する。
D.2.4.2 定電力放電による電池電力量の測定
電池電力量を,次の手順で測定する。
a) 専用充電器を用いて充電停止になるまで充電する。
b) 満充電になった組電池を,1時間以上放置して,冷却させる。
c) D.2.4.1 d)で記録した電圧・電流データの1パターン分の平均電力[単位:ワット(W)]を計算する。
d) 組電池に電子負荷装置,電流検出装置及び電圧検出装置を接続する。
e) c)で得た平均電力を一定に保って,製造業者が指定した駆動補助終止条件になるまで放電する。この
ときの消費電力量を電池電力量PB[単位:ワットアワー(Wh)]とする。
D.2.4.3 一充電当たりの走行距離の算出
D.2.4.1及びD.2.4.2の測定値を用いて,表D.3のように一充電当たりの走行距離(km)を算出する。走
行距離の計算値は,小数点以下第1位を四捨五入する。ただし,走行距離の計算値が10 km未満の場合は,
小数点以下第2位を四捨五入する。
表D.3−一充電当たりの走行距離の計算(定電力放電による場合)
走行パターンの種類
記号
走行距離の計算式
標準
低速
DG
G
G
B
G
L
P
P
D
×
=
4°登坂連続
DU
U
U
B
U
L
P
P
D
×
=
D.3 一充電当たりの走行距離の表示方法
電動アシスト自転車の一充電当たりの走行距離を,取扱説明書,カタログ,Webページなどに表示する
場合は,次に示す方法による。
a) 標準パターンの走行条件の表示方法 走行距離が最も短くなる走行モードで,表D.4の標準パターン
を繰り返し走行したときの一充電当たりの走行距離を表示しなければならない。同時に,他の走行モ
ードにおける一充電当たりの走行距離を併記してもよい。
なお,各走行路の間では,10秒間の停止を入れる。
24
D 9115:2018
表D.4−標準パターンの走行条件
順番
走行路
勾配
°
速度
km/h
距離
km
変速段
1
平たん路
0
15
1
最大の変速段
2
上り坂
4
10
1
a)
3
平たん路
0
15
1
最大の変速段
4
下り坂
4
20 b)
1
最大の変速段
注a) 上り坂の変速段は,最大変速段が奇数の場合,最大変速段数を2で除した数字を
切り上げた整数の段とする。最大変速段が偶数の場合,最大変速段数を2で除し
た数字に1を加えた整数の段とする。最大変速段数が2の場合は下の段とする。
b) 回生機能をもつ電動アシスト自転車で,20 km/hに達しない又は一定速の維持が
難しい場合は,下り坂の速度を10 km/h〜20 km/hとしてもよい。
ただし,速度変動は±20 %以下に抑える。
また,設計上の最高駆動補助速度が17 km/h未満の電動アシスト自転車に関しては,標準パターン
の代わりに,表D.5の低速パターンを適用する。
なお,各走行路の間では,10秒間の停止を入れる。
表D.5−低速パターンの走行条件
順番
走行路
勾配
°
速度
km/h
距離
km
変速段
1
平たん路
0
8
1
最大の変速段
2
上り坂
4
5
1
a)
3
平たん路
0
8
1
最大の変速段
4
下り坂
4
11 b)
1
最大の変速段
注a) 表D.4の注a)と同じ。
b) 回生機能をもつ電動アシスト自転車で,11 km/hに達しない又は一定速の維持が難
しい場合は,下り坂の速度を8 km/h〜11 km/hとしてもよい。
b) 4°登坂連続パターンの走行条件の表示方法 取扱説明書には,標準パターンのほかに,走行距離が最
も短くなる走行モードで,表D.6の4°登坂連続パターンを走行したときの一充電当たりの走行距離
も記載する。同時に,他の走行モードにおける一充電当たりの走行距離を併記してもよい。カタログ,
Webページなどについても,標準パターンのほかに4°登坂連続パターンを併記するのが望ましい。
表D.6−4°登坂連続パターンの走行条件
順番
走行路
勾配
°
速度
km/h
距離
km
変速段
1
上り坂
4
10
1
a)
注a) 表D.4の注a)と同じ。
c) 測定条件の表示方法 一充電当たりの走行距離を表示する場合は,該当する走行パターンの走行条件,
走行モード及び次の条件を記載する。ただし,タイヤ空気圧及び変速段は,個々の製品に合わせて具
体的な数字で表す方が望ましい。
1) 環境温度は20 ℃±5 ℃とする。無風の状態とする。
2) 組電池は新品を用いる。ヘッドライトは消灯状態とする。
3) 車載質量(乗員と荷物との合計)は65 kgとする。
25
D 9115:2018
4) 路面は,乾燥した平滑な路面とする。
5) タイヤ空気圧は,製造業者指定の空気圧とする。
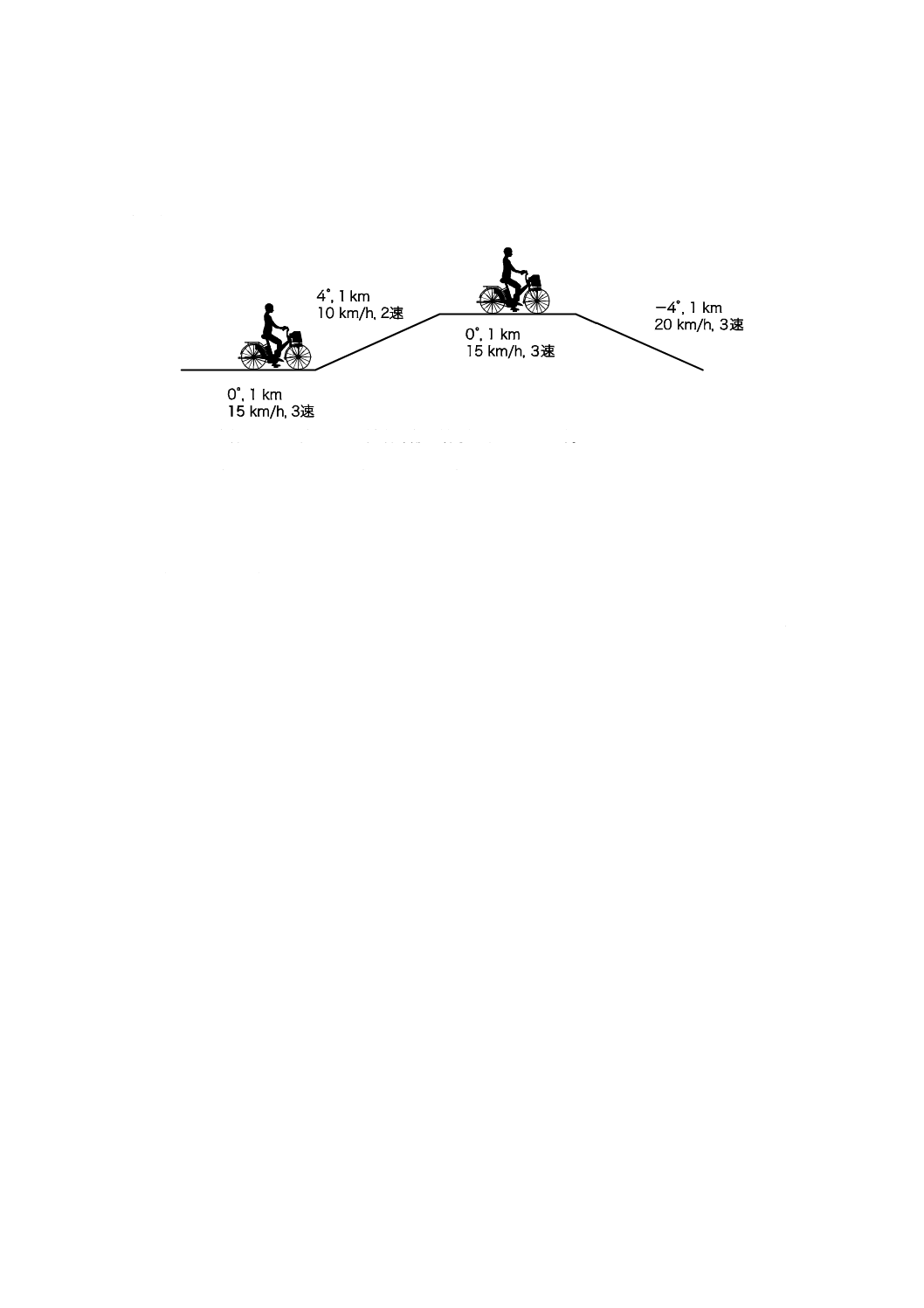
d) 走行パターン及び測定条件などの図示による表示方法 走行パターン,測定条件などは,図D.4のよ
うに図示してもよい。
・ 走行モードは強モード(走行距離が最も短くなるモード)。
・ 温度は20 ℃,無風の状態。組電池は新品。バッテリーランプは消灯の状態。
・ 路面は乾燥した平滑な路面。タイヤ空気圧は300 kPaのとき。
図D.4−標準パターンの図示の例(参考)
e) その他の条件での一充電当たりの走行距離の表示方法 D.3のa)〜c)に示した走行パターンと異なる
環境条件及び走行条件での一充電当たりの走行距離について,使用者への説明のために,元の走行距
離に対する比率又は差で記載してもよい(例えば,“気温が5 ℃以下の場合は,走行距離が30 %〜40 %
低下します”,“幼児2名(合計37 kg)同乗で走行する場合,1名乗車時の走行距離が約30 %低下し
ます”など)。