5
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
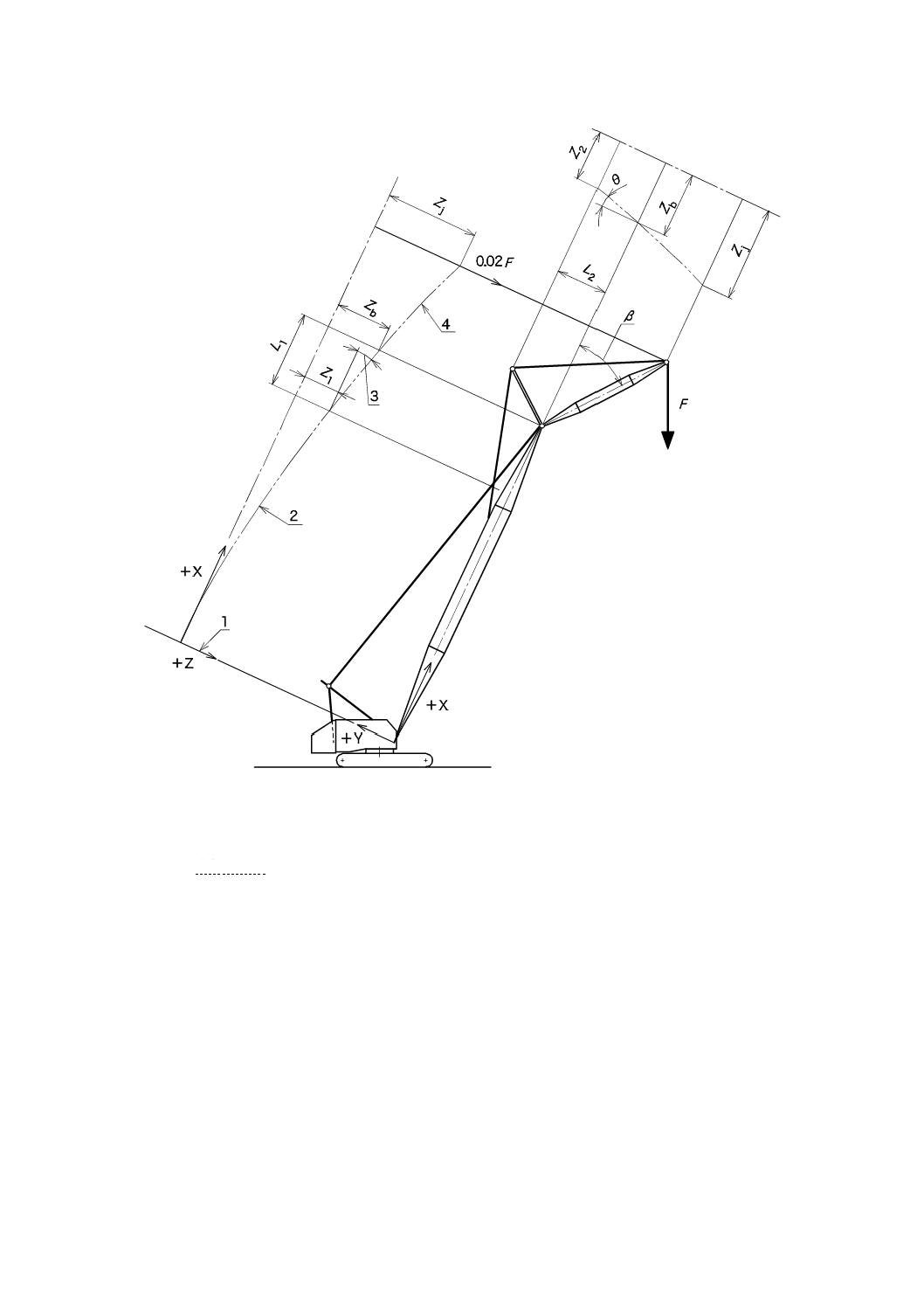
1:ブームフット中心線
2:ブーム中心線
3:こう配Zʼ
4:ジブ中心線
F:定格総荷重
図1−たわみ測定に関連した用語及び記号(フライジブ装着のラチスジブ)
B 8833-2:2008
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 1
3 用語及び定義 ··················································································································· 2
4 荷重及び荷重の組合せの選択 ······························································································ 2
4.1 基本的考え方 ················································································································ 2
4.2 同時加速 ······················································································································ 2
4.3 横荷重 ························································································································· 2
4.4 組立及び分解 ················································································································ 2
4.5 自動停止 ······················································································································ 3
5 移動式クレーン運転の加速による荷重 ·················································································· 3
5.1 一般 ···························································································································· 3
5.2 旋回による影響 ············································································································· 3
5.3 巻上げによる影響 ·········································································································· 3
5.4 駆動力の変化ΔFの適応 ·································································································· 4
6 荷重支持構造部分の性能照査の計算 ····················································································· 4
6.1 一般 ···························································································································· 4
6.2 限界状態設計法 ············································································································· 4
7 ラチスブームの横荷重たわみ ······························································································ 4
7.1 横荷重によるたわみ限界 ································································································· 4
7.2 フライジブの先端たわみ限界···························································································· 4
附属書A(規定)支柱の強度 ·································································································· 9
附属書B(参考)同時に作用する加速······················································································ 10
附属書C(参考)表1に示した荷重の組合せの適用方法······························································ 13
附属書JA(参考)JISと対応する国際規格との対比表 ································································ 16
B 8833-2:2008
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,社団法人日本クレーン協会 (JCA) 及び財団
法人日本規格協会 (JSA) から,工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本工
業標準調査会の審議を経て,厚生労働大臣,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。厚生労働大臣,経済産業大臣及び日本工業標準調査会は,
このような特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に係る確認に
ついて,責任はもたない。
JIS B 8833の規格群には,次に示す部編成がある。
JIS B 8833-1 第1部:一般
JIS B 8833-2 第2部:移動式クレーン
JIS B 8833-3 第3部:タワークレーン
JIS B 8833-4 第4部:ジブクレーン
JIS B 8833-5 第5部:天井走行クレーン及び橋形クレーン
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8833-2:2008
クレーン−荷重及び荷重の組合せに関する
設計原則−第2部:移動式クレーン
Cranes-Design principles for loads and load combinations-
Part 2 : Mobile cranes
序文
この規格は,2004年に第1版として発行されたISO 8686-2を基に作成した日本工業規格であるが,設
計方法を国内の実態に合わせるため,技術的内容を変更して作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JAに示す。
対応国際規格の規格群は,限界状態設計法及び許容応力設計法が規定されているが,この規格群の第1
部〜第5部までは限界状態設計法を規定し,JIS B 8831は許容応力設計法を規定している。
1
適用範囲
この規格は,第1部に規定した一般設計原則に加えて,JIS B 0146-2で規定する移動式クレーンの,限
界状態設計法に基づく荷重の組合せ及び諸係数の値について規定する。また,この規格は通常作業及び重
負荷作業の移動式クレーンに適用する。
注記1 日本国内での使用には,強制法規である移動式クレーン構造規格に従う必要がある。
なお,JIS B 8831は強制法規の規定に沿って作成されている。
注記2 性能照査の試験方法は,この規格に含まない。
注記3 移動式クレーン構造規格の適用を受ける場合は,構造部分の疲労に対する安全性が確認され
たものでなければならない。
注記4 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 8686-2 : 2004,Cranes−Design principles for loads and load combinations−Part 2 : Mobile
cranes (MOD)
なお,対応の程度を表す記号 (MOD) は,ISO/IEC Guide 21に基づき,修正していること
を示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
には適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0146-2 クレーン用語−第2部:移動式クレーン
注記 対応国際規格:ISO 4306-2,Cranes−Vocabulary−Part 2 : Mobile cranes (MOD)
2
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS B 8821 : 2004 クレーン鋼構造部分の計算基準
JIS B 8830 クレーン−風荷重の評価
注記 対応国際規格:ISO 4302,Cranes−Wind load assessment (MOD)
JIS B 8833-1 : 2008 クレーン−荷重及び荷重の組合せに関する設計原則−第1部:一般
注記 対応国際規格:ISO 8686-1 : 1989,Cranes−Design principles for loads and load combinations−
Part 1 : General (MOD)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 0146-2によるほか,次による。
3.1
通常作業 (normal service)
稼動負荷率80 %以下の臨時的作業を含む,構造部分の疲労解析を必要としない作業。
3.2
重負荷作業 (duty cycle service)
構造部分の疲労解析を要する繰返し作業。
例 グラブバケット,ドラグライン,リフティングマグネット,又はこれらと同等以上の繰返し作業。
4
荷重及び荷重の組合せの選択
4.1
基本的考え方
荷重は,製造業者の取扱説明書に従った,運転中に移動式クレーンの構成部品又は構造部分にかかる最
大荷重を,静的弾性力学モデルによって算定することを目的として組合せを行う。この性能照査の計算を
するために,次の基本的考え方を前提とする。
a) 基本的な工学的考え方に基づき,移動式クレーンの最も不利な姿勢及び形態を仮定し,応力的に最も
大きく又は不利になるように荷重の大きさ,位置,方向を仮定する。
b) 荷重は,この規格で定めた組合せができるが,必要に応じて実際の作業状態により近い組合せの荷重
を反映するために,減少係数によって荷重を調整することもできる。
4.2
同時加速
一般に,1種類の運転(例えば,旋回,起伏又は伸縮)の加速動作は巻上加速と同時に起こるものであ
り,巻上げをしないときは2種類の運転をするときだけに同時加速が生じるとみなす。しかし,製造業者
によって特別に禁止されている場合は,同時加速を考えなくてもよい。製造業者の取扱説明書に特に記載
がない場合は,走行時に他の動作を加速することを組み合わせなくてよい。
同時に作用する加速についての詳しい情報に関しては,附属書Bを参照。
4.3
横荷重
ブーム上に横荷重が生じる設計では,最大横荷重を組合せに含めて,適切な荷重の組合せとして計算す
る。旋回と風荷重以外とで横荷重が生じる場合は,次を含む。
a) ブーム先端シーブ及び巻上げドラム上の間で,巻上げワイヤロープ及びブーム中心線が最も離れた配
置の場合。
b) 旋回体などの移動式クレーン支持構造物の,たわみによるブーム取付け部の傾き。
4.4
組立及び分解
評価は,組立及び分解の各段階で行われる。移動式クレーンの形式及び姿勢に応じて,性能照査の計算
3
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
に適するように,荷重を受ける重要な部材又は部品の各々に対して実行しなければならない。計算は荷重
の組合せBによる,表1の係数を使用する。
4.5
自動停止
移動式クレーンに運転者が操作しなくても,その作動を停止し,ブレーキをかける制御又は装置を備え
ている場合,若しくは動力又は制御機能が失われた場合に自動的に作動するブレーキを備えている場合に
は,荷重の組合せは,表1の行番号11に規定する非常停止と同等の条件で行われなければならない。
5
移動式クレーン運転の加速による荷重
5.1
一般
移動式クレーンは,一般的にブームの長さに応じて,各種の伸縮装置又はフロントアタッチメントが適
用されるように設計する。したがって,移動式クレーンはある使用状態において,実際に移動式クレーン
運転者が目一杯に利用しないだけの余裕のある力をもっている場合がある(製造業者の取扱説明書参照)。
したがって,性能照査の計算において,加速又は減速のいずれかを引き起こす駆動力の変化ΔFは,駆動
特性又は制動特性よりもむしろ運転操作,又は試験のシミュレーションに基づき決めなければならない。
5.2
旋回による影響
実際には,旋回の加速度及び減速度は装着されたフロントエンドの附属装置,作業半径,使用される制
御装置,移動式クレーン運転者の操作方法,旋回の駆動機構及び制動機構の特性によって変化する。性能
照査の計算に対して,横荷重を発生する旋回加速又は減速を引き起こす駆動力の変化ΔFは,次によって
計算する。
a) ステップ状駆動制御装置を備えた移動式クレーン,及び運転者が旋回加速度又は減速度を制御できな
い移動式クレーンについては,ΔFは駆動特性又は制動特性から計算するものとする。
b) 無段階の連続可変駆動制御装置を備えた移動式クレーンにおいては,ΔFは次のいずれかに基づき計算
する。
1) 製造業者の取扱説明書に記載されている,通常運転中に生じる最も大きい力。
2) 運転者の操作シミュレーション又はテスト。
3) 駆動特性又は制動特性(ただし,ブーム先端に旋回によって生じる横力は,ラチスブームに対して
定格総荷重の2 %,又は伸縮ブームに対して定格総荷重の3 %以上とする。)
5.3
巻上げによる影響
5.3.1 巻上げによる慣性力の影響は,地面に拘束されていない荷を地切りする力(JIS B 8833-1の6.1.2.2
参照)を除いて,巻上駆動力の変化ΔFによる。この巻上駆動力の変化は,巻上げ又は制動特性で実際に
システムに生じる最大駆動トルク,及び制動トルクから計算する。
無段階の連続可変駆動制御装置を備えた巻上駆動については,ΔFは次の式によって計算する。
ΔF=δ ×F
δ=0.167 (Vh−0.2) 0.2≦Vh≦1.7
ここに,
F: 定格総荷重 (N)
Vh: 巻上速度及び巻下速度 (m/s)
係数δは通常作業用である。δは経験及び試験によって決定することができる。
5.3.2 巻上速度,巻下速度Vhが1.7 m/sより大きい場合には,δの増加は考慮しない。速度が0.2 m/s以下
の場合には,δは0とする。
5.3.3 重負荷作業の移動式クレーンにおいて,δは通常作業の2倍の値とするか,又は経験及び試験によ
4
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
って決定する。
5.4
駆動力の変化ΔFの適応
5.4.1 巻上駆動力の変化ΔFの値は,表2から得られる動的影響係数φ5を乗じて,表1の行番号5にある
荷重とする。
5.4.2 巻上げ以外の駆動力の変化ΔFの値は,表2から得られる動的影響係数φ5を乗じて,表1の行番号
4にある荷重とする。
6
荷重支持構造部分の性能照査の計算
6.1
一般
性能照査の計算は,限界状態設計法とする。限界状態設計法による計算は6.2による。
6.2
限界状態設計法
6.2.1 表1に限界状態設計法に適用する荷重及び荷重の組合せを示し,並びに適用する部分荷重係数γp及
び動的影響係数φnを示す。表2には,φnの値と他の関連する荷重情報を示す。抵抗係数γmはすべての荷
重組合せに対して1.1とする。局部に存在する欠陥及び材料強度の統計上のばらつきを考慮して,材料の
規定強度を抵抗係数γmで除するものとする。
6.2.2 圧縮荷重がかかる部材に対して,表1の抵抗係数γmと各荷重に適用される部分荷重係数γpは,附属
書Aによって選択される座屈計算式だけに適用する。
7
ラチスブームの横荷重たわみ
7.1
横荷重によるたわみ限界
ワイヤロープに支えられたラチスブーム,及びフライジブの横たわみは弾性的安定度の尺度である。こ
れらの組立柱では主に圧縮荷重がかけられる。過度の横たわみは弾性の不安定を引き起こす。したがって,
すべてのワイヤロープに支えられたラチスブーム及びフライジブは,定格総荷重とともに定格総荷重の
2 %の横荷重を受けるとき,それらの有効な長さの2 %を超えないたわみに制限する。たわみ限界は,計算
及び試験によって検証されてもよい。たわみ限界は,ラチスブーム又はラチスブームにフライジブが装着
されている移動式クレーンにだけ適用する。
7.2
フライジブの先端たわみ限界
ジブ上に取り付けられた一つのフライジブに関して,次の関係がある(図1参照)。
Zj≦0.02 Lj+Zb+Zʼ (Lj cosβ)+θ (Lj sinβ)
ここに,
Zj: フライジブの先端たわみ
Zb: ラチスジブの先端たわみ
Z1: ジブの先端から下への距離L1のラチスジブのたわみ
Z2: 先端のフライジブ支柱のたわみ
Lj: フライジブの長さ
また,次の値を計算する。
Zʼ(こう配)=(Zb−Z1)/ L1
θ=(Zb−Z2)/ L2
こう配Zʼ及びねじりθが算出できない場合は,Zjの式の最後の二つの数式の項が削除される場合がある。
5
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1:ブームフット中心線
2:ブーム中心線
3:こう配Zʼ
4:ジブ中心線
F:定格総荷重
図1−たわみ測定に関連した用語及び記号(フライジブ装着のラチスジブ)
6
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
白 紙
7
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表1−荷重及び荷重の組合せ
荷重の種類
荷重
荷重の組合せ A
荷重の組合せ B
荷重の組合せ C
行番号
部分荷重
係数γp
A1
A2
A3
A4
部分荷重
係数γp
B1
B2
B3
B4
部分荷重
係数γp
C1
C2
C3
C4
定常荷重
JIS B 8833-1
6.1 参照
重力,加速力
及び衝撃力
移動式クレーンの質量による荷重
1.22
φ1
φ1
1
−
1.16
φ1
φ1
1
−
1.1
φ1
1
φ1
1
1
定格総荷重
1.34
φ2
φ3
1
−
1.22
φ2
φ3
1
−
1.1
−
η
−
1
2
平たんでない場所を走行する移動式
クレーンの質量による荷重及び定格
総荷重
1.22
−
−
−
φ4
1.16
−
−
−
φ4
−
−
−
−
−
3
駆動装置によ
る加速
移動式クレーン
の質量による荷重
及び定格総荷重
巻上作動除く
1.34
φ5
φ5
1
−
1.22
φ5
φ5
1
−
1.1
−
−
φ5
−
4
巻上作動含む
1.34
−
−
φ5
−
1.22
−
−
φ5
−
−
−
−
−
−
5
非定常荷重
JIS B 8833-1
6.2 参照
気象の影響
作業中の風荷重
1.16
1
1
1
1
1.1
−
−
1
−
6
雪及び氷による荷重
1.22
1
1
1
1
1.1
−
−
1
−
7
特殊荷重
JIS B 8833-1
6.3 参照
地上に置かれた荷のつり上げによる荷重
1.1
φ2
−
−
−
8
休止時の風荷重
1.1
−
1
−
−
9
試験荷重
1.1
−
−
φ6
−
10
非常停止による荷重
1.1
−
−
−
φ5
11
抵抗係数γm 1.1
注記1 荷重組合せC2のηは,移動式クレーンが休止中のつり具の質量を考慮する(ηm=m−Δm,JIS B 8833-1 : 2008 6.3.1参照)。
注記2 表の左端欄で参照している箇条6.1, 6.2, 6.3の荷重のカテゴリーは,JIS B 8833-1 : 2008のものである。
注記3 係数φnに関しては,表2を参照。
注記4 荷重の組合せに関しては,表C.1を参照。
注記5 追加の荷重のケースについて算出が必要になることもある(4.4参照)。
8
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表2−動的影響係数φnの値及び所要事項
表1
行番号
係数
φn
JIS B 8833-1
箇条番号
φnの値及び関連規格
1
φ1
6.1.1
φ1=1±α,
通常作業:α=0
グラブバケット,ドラグライン及びリフティングマ
グネット作業のような重負荷作業:α=0.1
φ1の値は,その効果が有利不利によって1より大きく
するか小さくするかを決定。
2
φ2
6.1.2.1
通常作業に対する巻上等級:HC1
φ2=1.0 (無段階連続可変の駆動制御装置)
頻度の少ない重負荷作業に対する巻上等級:HC2
φ2=1.3 (無段階連続可変の駆動制御装置)
その他の作業に対する巻上等級:JIS B 8833-1参照。
2
φ3
6.1.2.3
グラブバケット,ドラグライン及びリフティングマグネ
ット作業のような重負荷作業に適用。
3
φ4
6.1.3.1
ホイール式移動式クレーン
φ4=1.1(走行速度≦0.4 m/s)
φ4=1.3(走行速度>0.4 m/s)
履帯式(クローラ)移動式クレーン
φ4=1.0(走行速度≦0.4 m/s)
φ4=1.1(走行速度>0.4 m/s)
4, 5及び11
φ5
6.1.4 及び
附属書E
無段階連続可変駆動制御の場合
φ5=1.2(通常作業)
φ5=1.5(重負荷作業)
ステップ状駆動制御の場合
φ5=1.6(通常作業)
φ5=2.0(重負荷作業)
6
6.2.1.1
JIS B 8830による。
7
6.2.1.3
受渡当事者間の協定がなされていない場合は,通常考慮
しない。
8
φ2
6.1.2.2.2
φ2 max=1.6(重負荷作業だけに適用)
9
6.3.1
休止時の最大風荷重は,受渡当事者間の協定がなされて
いなければ,JIS B 8830によって計算する。
10
φ6
6.3.2
荷重試験の荷重は,定格総荷重の1.25倍とする。この
値より大きな静的試験荷重又は動的試験荷重が要求さ
れる場合には,動的試験荷重に係数φ6を乗じる。
φ6=0.5(1+φ2)
9
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
支柱の強度
序文
この附属書は,この規格における支柱の強度について規定する。
A.1 支柱の強度式又は線図
JIS B 8821 : 2004に規定された支柱の強度式又は線図は,表1の抵抗係数γmとともに使用しなければな
らない。
10
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(参考)
同時に作用する加速
序文
この附属書は,同時に作用する加速に関する一般的な説明について記載するものであって,規定の一部
ではない。
B.1
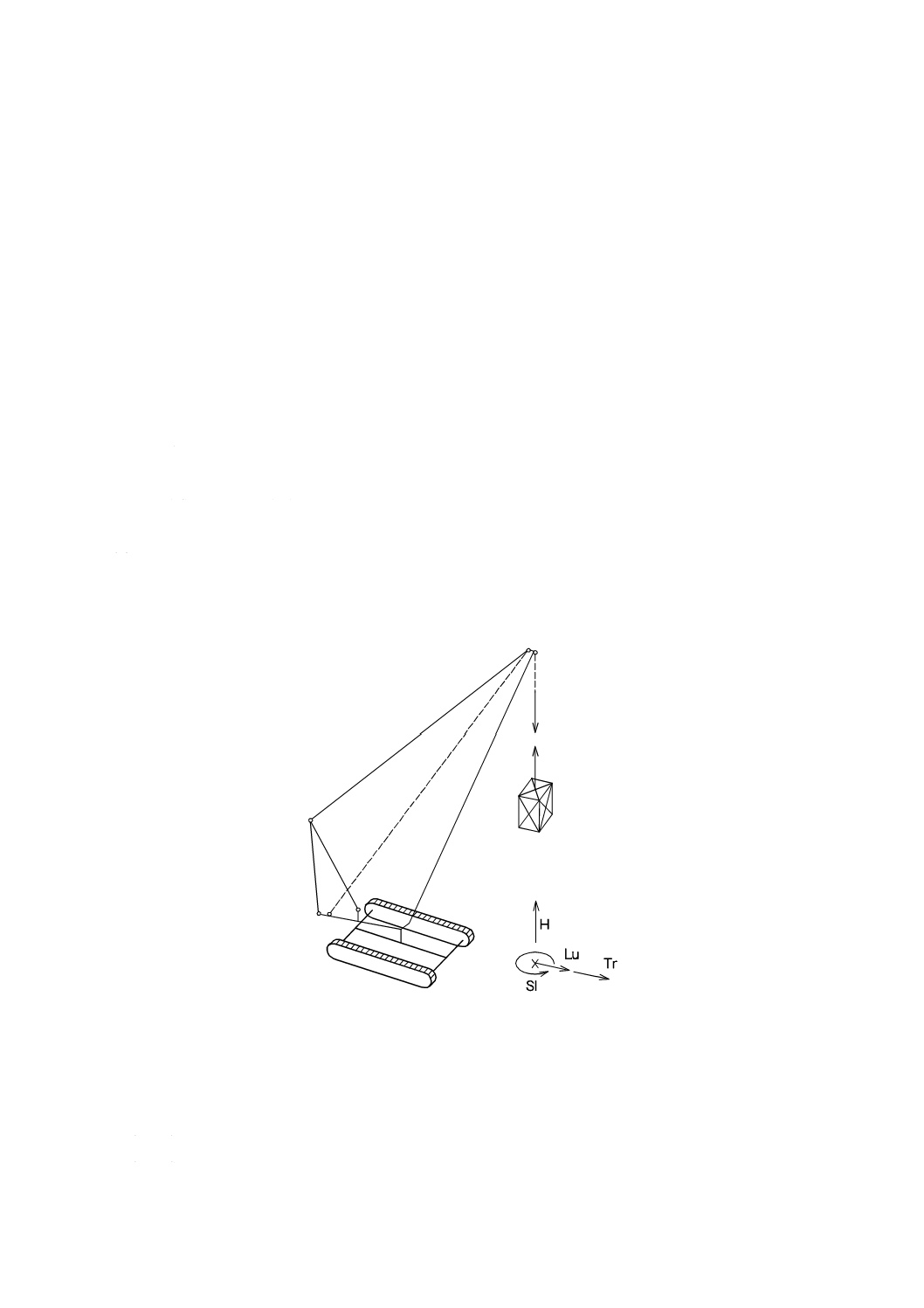
履帯式(クローラ)ラチスブームクレーン
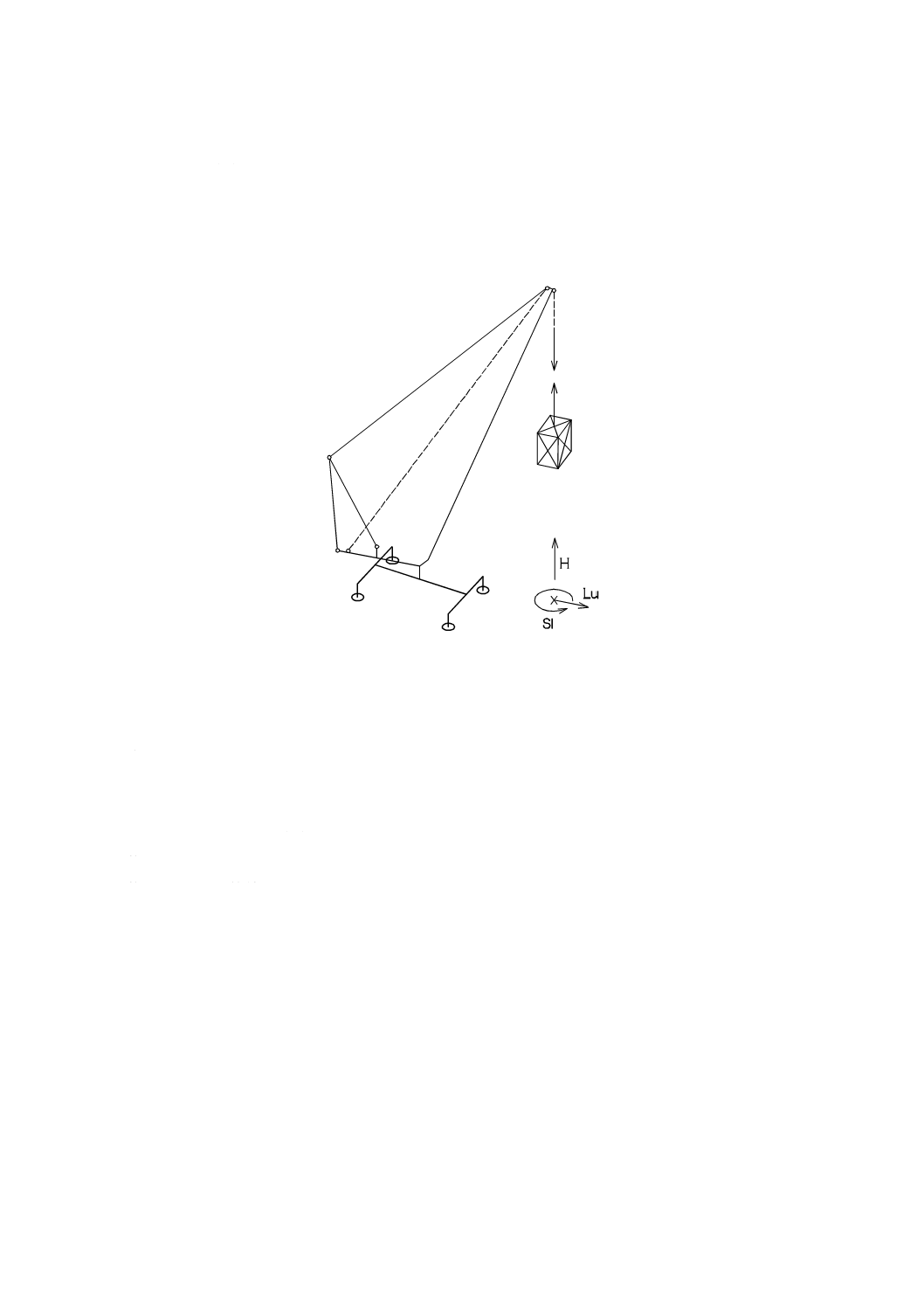
B.1.1 発生し得る加速の組合せ(図B.1参照)
組合せは,次による。
− 巻上げ (H) 及び旋回 (Sl)
− 巻上げ (H) 及び起伏 (Lu)
− 旋回 (Sl) 及び起伏 (Lu)
− つり荷走行 (Tr)
B.1.2 その他の加速
製造業者の取扱説明書によって特別に許可された場合,走行に加えて追加の加速が組み合わされること
がある。
図B.1−履帯式(クローラ)ラチスブームクレーン
B.2
ホイール式移動式ラチスブームクレーン
B.2.1 可能性のある加速の組合せ(図B.2参照)
組合せは,次による。
− 巻上げ (H) 及び旋回 (Sl)
− 巻上げ (H) 及び起伏 (Lu)
11
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− 旋回 (Sl) 及び起伏 (Lu)
− つり荷走行 (Tr)
B.2.2 その他の加速
製造業者の取扱説明書によって特別に許可された場合,走行に加えて追加の加速度が組み合わされるこ
とがある。
図B.2−ホイール式移動式ラチスブームクレーン
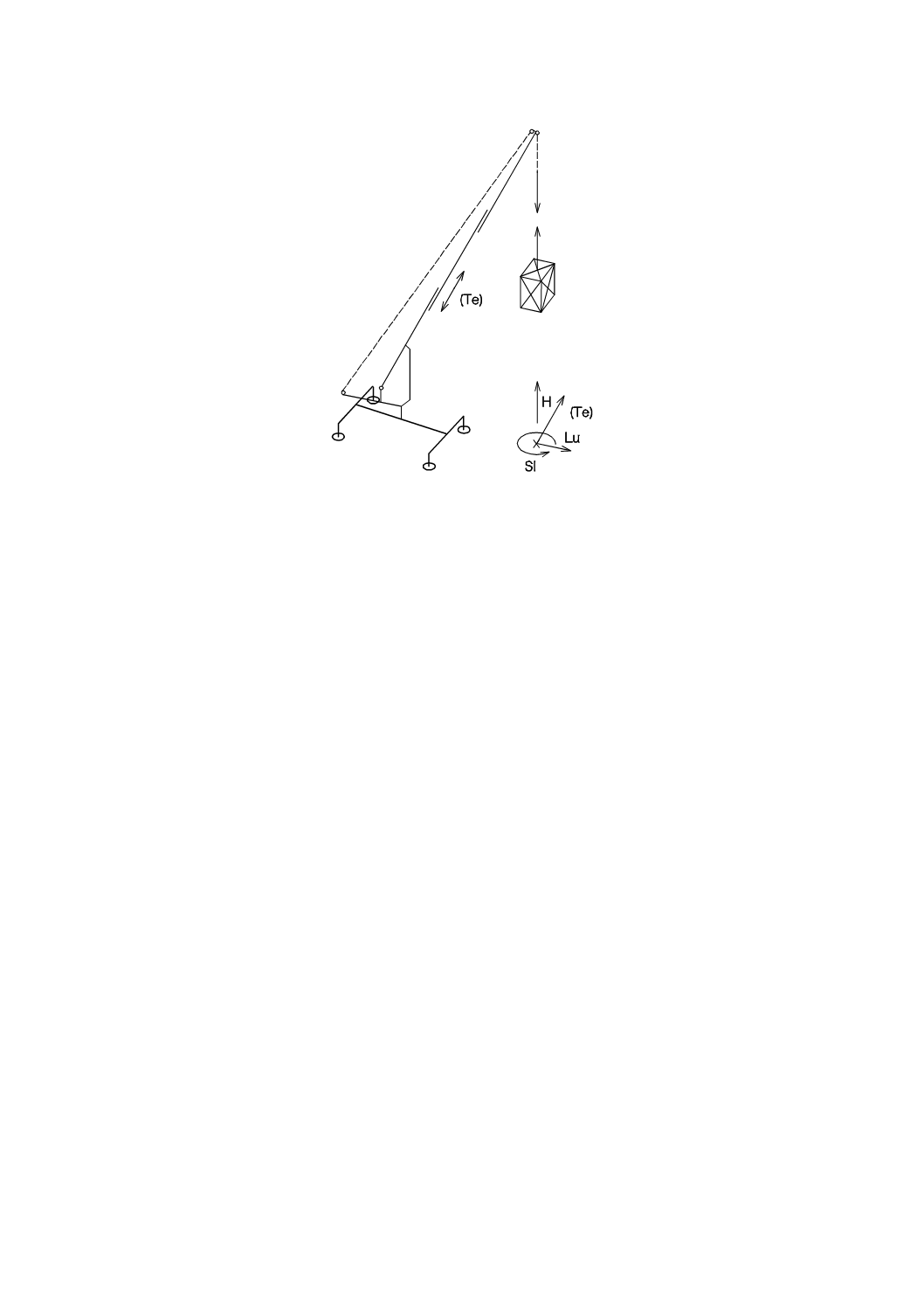
B.3
ホイール式移動式伸縮ブームクレーン
B.3.1 可能性のある加速の組合せ(図B.3参照)
組合せは,次による。
− 巻上げ (H) 及び旋回 (Sl)
− 巻上げ (H) 及び起伏 (Lu)
− 巻上げ (H) 及び伸縮 (Te)
− 旋回 (Sl) 及び起伏 (Lu)
− 旋回 (Sl) 及び伸縮 (Te)
− 伸縮 (Te) 及び起伏 (Lu)
− つり荷走行 (Tr)
B.3.2 その他の加速
製造業者の取扱説明書によって特別に許可された場合,走行に加えて追加の加速が組み合わされること
がある。
12
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図B.3−ホイール式移動式伸縮ブームクレーン
13
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
表1に示した荷重の組合せの適用方法
序文
この附属書は,表1に示した荷重の組合せの適用方法に関する一般的な説明について記載するものであ
って,規定の一部ではない。
C.1 荷重の組合せの説明
表C.1は荷重の組合せごとに,その組合せに入れるべき荷重の一般的な説明を行うとともに,繰返し作
業をする移動式クレーンにだけ適用する荷重の組合せを示す。
表C.1−荷重組合せの説明
表1の荷重組合
せ
説明
A1及び B1
つり荷を保持中に巻上げ以外の2動作を行う場合。作業中の風を受けないとき (A1),及び作業中
の風を受けるとき (B1)。
A2及び B2
重負荷作業をしている移動式クレーンが,つり下げた荷重の一部を動作中に急解放する場合。作業
中の風を受けないとき (A2),及び作業中の風を受けるとき (B2)。4.2及びJIS B 8833-1 : 2008 6.1.2.3
参照。
A3及び B3
巻上げ又は巻下げ中に,旋回,起伏,伸縮の1動作がある場合。作業中の風を受けないとき (A3),
及び作業中の風を受けるとき (B3)。4.2参照。
A4及び B4
平たんでない場所において荷をつって走行している場合。作業中の風を受けないとき (A4),及び
作業中の風を受けるとき (B4)。4.2及びJIS B 8833-1 : 2008 6.1.3.1参照。
C1
重負荷作業している移動式クレーンが,地面に置いてある荷重を巻き上げる場合。JIS B 8833-1 :
2008 6.1.2.2.2参照。
C2
休止中の風を受ける移動式クレーンであって,製造業者が仕様として明記している場合。
C3
定格総荷重の1.25倍の荷重によって移動式クレーンを試験する場合。
C4
4.5による,緊急遮断によって移動式クレーンを停止する場合。
C.2 記号
記号は,次による。
mC :移動式クレーンの質量,又は移動式クレーンの該当構成部品の質量
mR :定格総荷重にかかわる質量
mT :試験荷重にかかわる質量
ΔFS :旋回駆動の加速によって生じる力であり,関数fS (mC,mR) によって表すことができる。
ΔFL :起伏駆動の加速によって生じる力であり,関数fL (mC,mR) によって表すことができる。
ΔFT :伸縮駆動の加速によって生じる力であり,関数fT (mC,mR) によって表すことができる。
ΔFH :荷重巻上駆動の加速によって生じる力であり,関数fH (mC,mR) によって表すことができる。
FW :風及び氷雪によって生じる力。
14
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
σ :荷重及びそれらの荷重成分によって生じる応力。
φ :表2に示す,動的影響係数。
C.3 動的影響係数の適用
荷重と応力との関係が非線形の場合,動的影響係数φは荷重に適用されるものとする。その関係が線形
の場合,係数は荷重か応力のいずれかに適用してもよい。
C.4 個々の適用可能な荷重の組合せにおける適切な荷重の選択
C.4.1 荷重の組合せのA1及びB1においては,巻上げ以外の2駆動力が組み合わされる。したがって,最
大応力を生じさせるような2駆動力による荷重を含む組合せだけを考慮する。
(ΔFS+ΔFL,ΔFS+ΔFT,ΔFL+ΔFT)のうちから最大となる組合せを選択し,最大応力を生む組合せ(max.
comb.)とする。
荷重の組合せ σ(A1)=σ[γpφ1mC+γpφ2mR+γpφ5×(max. comb.)]
荷重の組合せ σ(B1)=σ[γpφ1mC+γpφ2mR+γpφ5×(max. comb.)+γp FW]
C.4.2 荷重の組合せのA2及びB2においては,巻上げ以外の2駆動力が組み合わされる。したがって,
荷重の組合せ σ(A2)=σ[γpφ1mC+γpφ3mR+γpφ5×(max. comb.)]
荷重の組合せ σ(B2)=σ[γpφ1mC+γpφ3mR+γpφ5×(max. comb.)+γp FW]
C.4.3 荷重の組合せのA3及びB3においては,巻上げ以外の1駆動力が組み合わされる。したがって,最
大応力を生じさせるような駆動力による荷重を含む組合せだけを考慮する。
(ΔFS,ΔFL,ΔFT )のうち から最大となる荷重を選択し,最大駆動力 (max. drive force) とする。
荷重の組合せ σ(A3)=σ[γpmC+γpmR+γpφ5ΔFH+γp×(max. drive force)]
荷重の組合せ σ(B3)=σ[γpmC+γpmR+γpφ5ΔFH+γp×(max. drive force)+γp FW]
C.4.4 荷重の組合せのA4及びB4においては,平たんでない地面を運転する移動式クレーンに対する影響
を反映する。
荷重の組合せ σ(A4)=σ(γpφ4mC+γpφ4mR)
荷重の組合せ σ(B4)=σ(γpφ4mC+γpφ4mR+γp FW)
C.4.5 荷重の組合せC1は,地面に置かれた荷重を巻上げする影響を検討する。
荷重の組合せ σ(C1)=σ(γpφ1mC+γpφ2mR)
C.4.6 荷重の組合せC2は,休止中の風の条件を反映する。
荷重の組合せ σ(C2)=σ(γpmC+γpηm+γp FW)
C.4.7 荷重の組合せC3は,動的試験の影響を受ける。
荷重の組合せ σ(C3)=σ[γpφ1mC+γpφ6mT+γpφ5×(max. drive force)+γp FW]
C.4.8 荷重の組合せC4は,4.5の条件下において自動停止動作の影響を検討する。
荷重の組合せ σ(C4)=σ[γpmC+γpmR+γpφ5ΔFH又はγpφ5×(max. drive force)]
駆動力は4.5の条件下だけとする。
C.4.9 4.4の規定に従い,他の荷重の組合せが必要な場合がある。
C.5 荷重及び荷重の組合せの例
C.5.1 荷重の組合せA3
荷重の組合せA3の例として,特定の荷重影響による応力は,次の式で求められる。
15
B 8833-2:2008
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
σ(A3)=σ(1.22×mC)+σ(1.34×mR)+σ(1.34×φ5ΔFH )+max[σ(1.34×ΔFS),σ(1.34×ΔFL) 又はσ
(1.34×ΔFT)]
参考文献 JIS B 8831 : 2004 クレーン−荷重及び荷重の組合せに関する設計原則
ISO 4310 : 1981,Cranes−Test code and procedures
16
B 8833-2:2008
附属書JA
(参考)
JISと対応する国際規格との対比表
JIS B 8833-2 : 2008 クレーン−荷重及び荷重の組合せに関する設計原則−第2部:
移動式クレーン
ISO 8686-2 : 2004,Cranes−Design principles for loads and load combinations−Part
2 : Mobile cranes
(Ⅰ) JISの規定
(Ⅱ)
国際規格
番号
(Ⅲ) 国際規格の規定
(Ⅳ) JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(Ⅴ) JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び名称
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
1適用範
囲
1
変更
ISO規格は,許容応力設計法又
は限界状態設計法を設計原則
としているが,この部では限界
状態設計法によるものとし,
JIS B 8831に許容応力設計法
による規定をした。
技術的差異はない。
注記3 移動式クレ
ーン構造規格の適
用を受ける場合は,
構造部分の疲労に
対する安全性が確
認されたものでな
ければならない。
追加
JISでは,移動式クレーン構造
規則に規定されている疲労に
対する安全性の確認の義務に
ついて,注記に記載した。
将来のISO規格の改正時に提案す
る予定。
2 引用規
格
2
ISO 4310 : 1981
削除
JISでは,直接引用しておらず
削除した。
技術的差異はない。
2
B
8
8
3
3
-2
:
2
0
0
8
2
B
8
8
3
3
-2
:
2
0
0
8
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
17
B 8833-2:2008
(Ⅰ) JISの規定
(Ⅱ)
国際規格
番号
(Ⅲ) 国際規格の規定
(Ⅳ) JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(Ⅴ) JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び名称
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
3用語及び
定義
3
3.1
3.1
定格荷重(rated capacity,
rated load)
つり具の質量を含んだつ
り上げ荷重
削除
関連する荷重の定義は,JIS B
0146-2に規定されているので
省略した。移動式クレーンの
定格荷重については,欧米で
はつり具の質量を含む場合が
あるが,我が国では含まず,つ
り具の質量を含む場合を定格
総荷重と呼ぶ。
技術的差異はない。
3
3.1
3.2
3
3.2
3.3
変更
上記削除による項番変更。
技術的差異はない。
4荷重及び
荷重の組
合せの選
択
4.3 b)
旋回体などの移動
式クレーン支持構
造物
4
4.3 b)
クレーン支持構造物
追加
JISでは分かりやすい表現と
した。
技術的差異はない。
4
4.4,4.5
5移動式ク
レーン運
転の加速
による荷
重
5.4.1,5.4.2
6荷重支持
構造部分
の性能照
査の計算
6.2.1,6.2.2
表1
表2
4
4.4,4.5
5
5.4.1,
5.4.2
6
6.2.1,
6.2.2
表1又は表2
表3
変更
1適用範囲の変更によって項
番変更。
技術的差異はない。
2
B
8
8
3
3
-2
:
2
0
0
8
2
B
8
8
3
3
-2
:
2
0
0
8
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
18
B 8833-2:2008
(Ⅰ) JISの規定
(Ⅱ)
国際規格
番号
(Ⅲ) 国際規格の規定
(Ⅳ) JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(Ⅴ) JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び名称
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
5
5.2,5.3
7ラチスブ
ームの横
荷重たわ
み
7.1
定格総荷重
5
5.2,5.3
7
7.1
定格荷重
変更
移動式クレーンの定格荷重に
ついては,欧米ではつり具の
質量を含む場合があるが,我
が国では含まず,つり具の質
量を含む場合を定格総荷重と
した。
技術的差異はない。
6
6.1
限界状態設計法と
する。
6
6.1
許容応力法か限界状態設
計法のいずれかを選ぶも
のとする。
変更
ISO規格は,許容応力設計法
又は限界状態設計法を設計原
則としているが,JIS B 8831
に許容応力設計法による規定
をしたので,この規格では限
界状態設計法によるものとし
た。
技術的差異はない。
6.2
削除
上記による削除。
技術的差異はない。
6.2
6.2.1
6.2.2
6.3
6.3.1
6.3.2
変更
上記削除によって項番変更。
技術的差異はない。
表1
削除
許容応力設計法の表削除。
技術的差異はない。
図1 定格総荷重
図1 定格荷重
変更
3.1と同一。
技術的差異はない。
表1
表2
表2
表3
変更
上記削除によって項番変更。
技術的差異はない。
表1 定格総荷重
表2 定格荷重
変更
3.1と同一。
技術的差異はない。
2
B
8
8
3
3
-2
:
2
0
0
8
2
B
8
8
3
3
-2
:
2
0
0
8
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
19
B 8833-2:2008
(Ⅰ) JISの規定
(Ⅱ)
国際規格
番号
(Ⅲ) 国際規格の規定
(Ⅳ) JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(Ⅴ) JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び名称
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
表2 JIS B 8830に
よる。
表2 ISO 4302規定最小
値:作業中の風速は9.0
m/s(50 N/m2の静止圧力
に対応)未満としない。
変更
JISではISO 4302に対応する
JIS B 8830の規定事項による
とした。
技術的差異はない。
試験荷重のうち,荷
重試験の荷重は,定
格総荷重の1.25倍
とする。この値より
大きな静的試験荷
重又は動的試験荷
重が要求される場
合には,動的試験荷
重に係数φ6を乗じ
る。
ISO 4310規定:動的試験
は定格荷重の110 %,静
的試験は定格荷重の
125 %で実施。
変更
追加
JISでは,ISO 4310及びクレー
ン等安全規則に規定されてい
る過負荷試験の値(定格荷重
の1.25倍)を規定した。
なお,第1部の規定も追加し
た。
技術的差異はない。
附属書A
JIS B 8821 : 2004に
規定された支柱の
強度式(又は線図)
は,表1の抵抗係数
γmとともに使用し
なければならない。
附属書A
ISO 10721-1及びISO
10721-2の支柱の強度式
(又は線図)は,表1の
許容応力係数γf又は表2
の抵抗係数γmとともに使
用しなければならない。
別の選択肢として,国家
規格における支柱の強度
式(又は線図)を,適切
な許容応力及び抵抗係数
とともに使用することも
できる。
変更
削除
JISでは強制法規の規定を満
足しているJIS B 8821 : 2004
の規定事項に準じた。
許容応力設計法にかかわる規
定の削除。
技術的差異はない。
附属書C
表1及び表2
附属書C
表1,表2及び表3
変更
許容応力設計法にかかわる表
の削除による変更。
技術的差異はない。
2
B
8
8
3
3
-2
:
2
0
0
8
2
B
8
8
3
3
-2
:
2
0
0
8
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
20
B 8833-2:2008
(Ⅰ) JISの規定
(Ⅱ)
国際規格
番号
(Ⅲ) 国際規格の規定
(Ⅳ) JISと国際規格との技術的差異の箇条
ごとの評価及びその内容
(Ⅴ) JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び名称
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
附属書C
表C.1 (C3) 定格総
荷重の1.25倍の荷
重により移動式ク
レーンを試験する
場合
附属書C
表C.1 (C3) ISO 4310に従
って移動式クレーンを試
験する場合
変更
JISでは,クレーン等安全規則
に規定されている荷重試験の
値を記載した。
技術的差異はない。
参考文献
JIS B 8831 : 2004
ISO 4310 : 1981
追加
JISでは,参考文献を追加し
た。
技術的差異はない。
JISと国際規格との対応の程度の全体評価:ISO 8686-2 : 2004 : MOD
関連する法規
移動式クレーン構造規格及びクレーン等安全規則
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除……………… 国際規格の規定項目又は規定内容を削除している。
− 追加……………… 国際規格にない規定項目又は規定内容を追加している。
− 変更……………… 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD…………… 国際規格を修正している。
2
B
8
8
3
3
-2
:
2
0
0
8
2
B
8
8
3
3
-2
:
2
0
0
8
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。