B 8397-1:2008 (ISO 4392-1:2002)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 1
3 用語及び定義 ··················································································································· 2
4 記号······························································································································· 2
5 試験装置 ························································································································· 2
6 試験前準備データ ············································································································· 4
7 試験条件 ························································································································· 4
8 試験手順 ························································································································· 5
9 試験結果の表示 ················································································································ 5
10 試験報告書 ···················································································································· 7
附属書A(規定)測定精度の等級 ···························································································· 9
B 8397-1:2008 (ISO 4392-1:2002)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第14条によって準用する第12条第1項の規定に基づき,社団法人日本フル
ードパワー工業会 (JFPA) 及び財団法人日本規格協会 (JSA) から,工業標準原案を具して日本工業規格を
改正すべきとの申出があり,日本工業標準調査会の審議を経て,経済産業大臣が改正した日本工業規格で
ある。
これによって,JIS B 8397-1 : 2001は改正され,この規格に置き換えられた。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に係る確認について,責任は
もたない。
JIS B 8397の規格群には,次に示す部編成がある。
JIS B 8397-1 第1部:一定低速及び一定圧力条件
JIS B 8397-2 第2部:起動特性
JIS B 8397-3 第3部:一定流量及び一定トルク条件
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 8397-1:2008
(ISO 4392-1:2002)
油圧−モータ特性の決定方法−
第1部:一定低速及び一定圧力条件
Hydraulic fluid power-Determination of characteristics of motors-
Part 1 : At constant low speed and constant pressure
序文
この規格は,2002年に第3版として発行されたISO 4392-1を基に,技術的内容及び対応国際規格の構
成を変更することなく作成した日本工業規格である。
1
適用範囲
この規格は,定容量形及び可変容量形の回転形油圧モータの低速特性を決定する方法について規定する。
油圧モータの安定した連続的なトルク出力に重大な影響をもつ振動が発生したり,油圧モータの接続され
ているシステムに影響を及ぼしたりするような低速での特性を決定する方法にも適用できる。
測定精度は,A,B及びCの3等級に分けて,附属書Aに規定する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 4392-1 : 2002,Hydraulic fluid power−Determination of characteristics of motors−Part 1 : At
constant low speed and constant pressure (IDT)
なお,対応の程度を表す記号 (IDT) は,ISO/IEC Guide 21に基づき,一致していることを示
す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS B 0125-1 油圧・空気圧システム及び機器−図記号及び回路図−第1部:図記号
注記 対応国際規格:ISO 1219-1,Fluid power systems and components−Graphic symbols and circuit
diagrams−Part 1 : Graphic symbols for conventional use and data-processing applications (MOD)
JIS B 0142 油圧及び空気圧用語
注記 対応国際規格:ISO 5598,Fluid power systems and components−Vocabulary (IDT)
JIS B 8385 油圧−ポンプ・モータ及び一体形トランスミッション−パラメータの定義及び文字記号
注記 対応国際規格:ISO 4391,Hydraulic fluid power−Pumps, motors and integral transmissions−
Parameter definitions and letter symbols (IDT)
JIS B 9939-1 油圧−測定技術−第1部:一般測定原則
注記 対応国際規格:ISO 9110-1,Hydraulic fluid power−Measurement techniques−Part 1 : General
measurement principles (MOD)
2
B 8397-1:2008 (ISO 4392-1:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS B 9939-2 油圧−測定技術−第2部:管路における平均定常圧力の測定
注記 対応国際規格:ISO 9110-2,Hydraulic fluid power−Measurement techniques−Part 2 : Measurement
of average steady-state pressure in a closed conduit (MOD)
JIS K 2001 工業用潤滑油−ISO粘度分類
注記 対応国際規格:ISO 3448,Industrial liquid lubricants−ISO viscosity classification (MOD)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS B 0142によるほか,次による。
3.1
完全モータ周期 (complete motor cycle)
漏れ量及び/又はトルクの測定値が繰り返すようになるまでのモータ出力軸の回転角の合計値。
注記 大部分のモータでは360°であるが,特殊な場合,例えば,内接歯車モータのような場合には
出力軸が数回転することもある。
4
記号
4.1
この規格で用いる量記号及び添字は,JIS B 8385による。
4.2
図1で用いる図記号は,JIS B 0125-1による。
5
試験装置
5.1
油圧試験回路
5.1.1
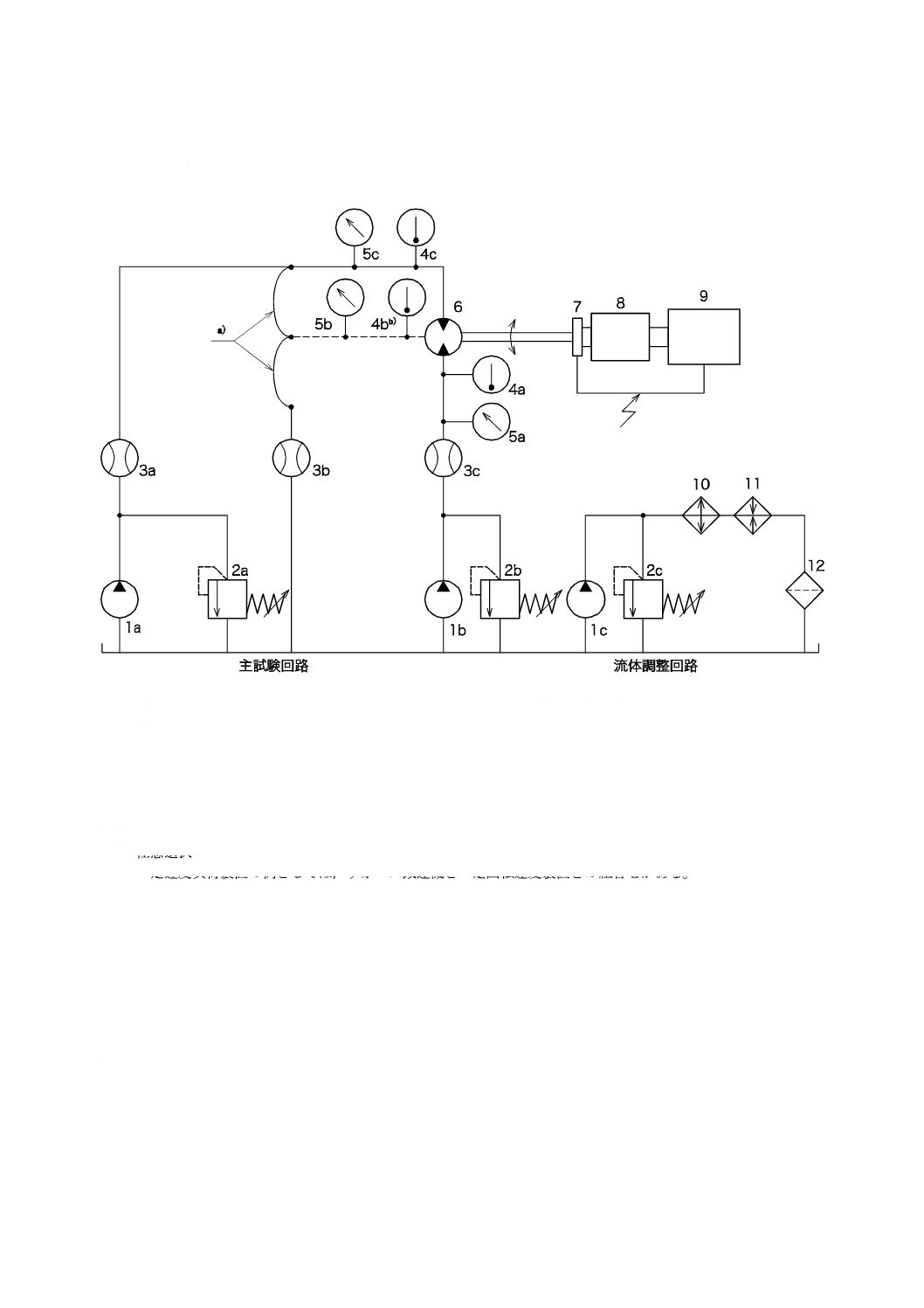
図1に示すような試験回路を使用しなければならない。
この図は,構成機器に故障が生じた場合の回路破損を防止するために必要なすべての安全装置を示して
いない。試験を行う場合には,人及び機器装置を危険から守るため,十分な配慮をすることが重要である。
注記 図1は,両方向回転モータを試験するための基本的な回路であるが,回路を変更すれば片方向
回転モータの試験にも適用できる。
5.1.2
油圧供給源(図1の1a及び1b)を使用しなければならない。また,リリーフ弁(図1の2a及び
2b)は,8.2の条件を満足させるために設置しなければならない。
5.1.3
供試モータ及び他の構成機器を保護するために必要なフィルタ,並びに箇条7に規定する流体温度
を保つために,流体調整回路を組み込まなければならない。
5.1.4
供試モータに外部ケースドレン配管をする場合には,ドレン配管は総流量[5.3.1 a) 参照]を測定
するために供試モータの戻り配管に接続しなければならない。
モータケース内圧が,前記の方法によると安全値を超える場合は,ケースドレン配管と戻り配管とを分
離してもよいが,両者の流量を同時に測定しなければならない。
5.1.5
5.1.4の代替案として高圧流量計[5.3.1 d) 参照]をモータの入口配管中に設置し,総流量を測定し
てもよい。
5.1.6
供試モータの接続ポートは,モータ軸が一定速度負荷装置と同じ方向に回転するように油圧回路に
接続しなければならない。
5.2
試験装置
5.2.1
試験装置は,5.1の試験回路を用い,図1に示す機器によって構成しなければならない。
3
B 8397-1:2008 (ISO 4392-1:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.2.2
可変容量形モータの試験実施中には,不注意による容積変化を防止するために,確実な固定装置を
付けなければならない。
図記号説明
1a,1b,1c
循環ポンプ
2a,2b,2c
リリーフ弁
3a,3b,3c
流量計
4a,4b b),4c 温度計
5a,5b,5c
圧力計
6
供試モータ
7
8
9
10
11
12
回路速度及び軸角度制御装置
トルク変換器
一定速度負荷装置c)
冷却器
加熱器
フィルタ
注a) どちらか一方へ接続(5.1.4参照)
b) 任意選択
c) 一定速度負荷装置の例としては,ウォーム減速機と一定回転速度装置との組合せがある。
図1−両方向回転モータ用の代表的試験回路
5.3
測定
5.3.1
測定器は,次の試験データを測定するために選定し,装備しなければならない。
a) 総流量(5.1.4参照)
b) 入口及び出口温度
c) 入口及び出口圧力
d) 入口流量(5.1.5参照)
e) 出力トルク
f)
出力軸の回転速度及び角度の位置
4
B 8397-1:2008 (ISO 4392-1:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.3.2
測定器は,JIS B 9939-1及びJIS B 9939-2の要求事項に適合しなければならない。測定器の系統誤
差は,選択した測定精度の等級と一致しなければならない(附属書A参照)。
5.3.3
予測される最大の基本データ周波数の10倍以上の分解能をもつ適切な記録計を選定し取り付けな
ければならない。
6
試験前準備データ
6.1
モータ製造業者のデータ及びその他知られている事実を用いて,次の試験前データを準備する。
a) 定格圧力における幾何学的又は推定押しのけ容積に基づいた定格トルクTg, n又はTi, nを,次の式によっ
て求める。
π
×
=
2
Δ
g
n
n
g,
V
p
T
又は
π
×
=
2
Δ
i
n
n
i,
V
p
T
ここに, Δpn: 定格圧力における差圧
Vg: 幾何学的押しのけ容積
Vi: 推定押しのけ容積
b) モータ出力軸1回転当たりの容積脈動数Nを決定する。このとき,伝動装置が,周波数に影響を与え
ることを考慮する。
c) 基本データ周波数fe (Hz) を,次の式によって求める。
N
n
f
×
=60e
e
ここに,
ne: 試験回転速度 min−1
N: 容積脈動数[6.1 b) による。]
6.2
定格回転速度における仮想(幾何学的又は推定)流量qVg, n又はqVi, nを求める。
このとき定格回転速度nnは,製造業者の推奨する値を使う。
g
n
n
g,
V
n
qV
×
=
又は
i
n
n
i,
V
n
qV
×
=
6.3
流体の動粘度をJIS K 2001に基づいて決定する。
6.4
試験中に発生する最大出力トルクを,6.1 a) でTg, n又はTi, nを決定したように推定する。
7
試験条件
試験条件は,次の項目を満足しなければならない。
a) モータ入口での流体温度θ:50 ℃ 又は80 ℃
b) 入口圧力:定格圧力の100 %及び50 %
c) 背圧:モータ製造業者が示す許容範囲の値で,かつ,一定とする。
d) 出力回転速度:モータ製造業者が推奨する所定の回転方向での最低回転速度,又は推奨値がない場合
は1 min−1
e) 押しのけ容積:可変容量形モータの場合には,製造業者が推奨する可能最大押しのけ容積及び最小押
しのけ容積。
5
B 8397-1:2008 (ISO 4392-1:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
8
試験手順
8.1
差圧(又は,場合によっては入口及び出口圧力),出力トルク及び総流量(出口圧力がケース圧力の
安全限界を超える場合は,5.1.5参照)を記録するために測定器及び記録装置を接続する。
試験開始前には,必要に応じてモータケースを作動流体で満たす。
8.2
入口及び出口圧力は,読みの±2 %又は±0.1 MPaのどちらか大きい方の範囲で一定に保つ。
8.3
出力回転速度は,平均値の±2 %の範囲に保つ。
8.4
入口の流体温度は,記録している間±2 ℃以内に保つ。データは,その温度がこの範囲内にある期
間だけ記録するように確実を期す。
8.5
各試験データを記録する前に熱平衡状態にする。
注記 このためには,例えば,次のようにしてもよい。
a) モータを調整式の一定速度負荷から切り離す。
b) 入口流体温度を保持しながら出口流体温度が安定するまで,モータを定格速度で運転する。
c) 一定速度負荷を再接続し,要求される組合せ試験の条件でデータを記録する。
8.6
差圧,入口流体温度,押しのけ容積及び回転方向の各組合せの試験条件ごとに,8.1に記載の各変数
を同時に記録する。
8.7
1完全モータ周期を得るのに必要な回転数を記録する。
8.8
実際の測定値と,それに対応する試験条件を記録する。
8.9
記録中モータに急激な変化又は一様でない状態が生じた場合には,その現象は記録する。
8.10 データをデジタルで得る技術を使用するときは,試験前準備で決定した漏れ量並びにトルクの最大
値及び最小値に対し95 %信頼度を備えたサンプリング間隔を選択する。
8.11 モータのトルク又は漏れ量のいずれかでも再現性のない傾向が生じた場合には,その現象は記録す
る。
9
試験結果の表示
9.1
1完全モータ周期を均等に分割した各軸位置における体積流量qVe, φを,次の式によって求める。
ϕ
ϕ
ϕ
ω
s,
i,
e,
2
V
V
q
V
q
+
=π
角速度ωは非常に小さく,各軸位置での容積損失qVs, φの占める割合が圧倒的に大きい。式中のVi, φは,
各軸位置での推定押しのけ容積である。
9.2
1完全モータ周期中の平均流量qVe, maを,次の式によって求める。
z
q
q
q
q
q
z
V
V
V
V
V
ϕ
ϕ
ϕ
ϕ
e,
3
e,
2
e,
1
e,
ma
e,
+
+
+
+
=
Λ
ここに, 添字φ1,φ2,φ3…φz: それぞれの軸位置
z: 1回転当たりの読取り数
9.3
各々選択した軸位置での流量の偏差ΔqVe, φを,次の式によって求める。
ϕ
ϕ
e,
ma
e,
e,
Δ
V
V
V
q
q
q
−
=
9.4
1完全モータ周期中の平均流量偏差ΔqVe, maを,次の式によって求める。
6
B 8397-1:2008 (ISO 4392-1:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
z
q
q
q
q
q
z
V
V
V
V
V
ϕ
ϕ
ϕ
ϕ
e,
3
e,
2
e,
1
e,
ma
e,
Δ
Δ
Δ
Δ
Δ
+
+
+
+
=
Λ
9.5
流量偏差指標IrqVを,次の式によって求める。
ma
e,
ma
e,
Δ
V
V
qV
q
q
Ir=
又は
z
V
V
V
z
V
V
V
V
V
V
qV
q
q
q
q
q
q
q
q
q
Ir
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
e,
2
e,
1
e,
e,
ma
e,
2
e,
ma
e,
1
e,
ma
e,
+
+
+
−
+
+
−
+
−
=
Λ
Λ
9.6
少なくとも1完全モータ周期に対する平均容積効率ηv, maを,次の式によって求める。
ma
e,
ma
i,
ma
v,
2
V
q
ω
V
π
×
=
η
ここに,
Vi, ma: 平均推定押しのけ容積
ω: 角速度
qVe, ma: 平均体積流量
9.7
ピークからピークまでの相対流量偏差δqVeを,次の式によって求める。
ma
e,
min
e,
max
e,
e
V
V
V
V
q
q
q
q
−
=
δ
ここに, qVe, max: 選択した軸位置における最大流量
qVe, min: 選択した軸位置における最小流量
9.8
1完全モータ周期を均等に分割した各軸位置における出力トルクTe, φを,次の式によって求める。
ϕ
ϕ
ϕ
s,
i,
e,
2
Δ
T
V
p
T
−
π
×
=
ここに,
Δp: 差圧
Vi, φ: 選択された軸位置での推定押しのけ容積
Ts, φ: 選択された軸位置でのトルク損失
9.9
1回転当たりの平均トルクTe, maを,次の式によって求める。
z
T
T
T
T
T
z
ϕ
ϕ
ϕ
ϕ
e,
3
e,
2
e,
1
e,
ma
e,
+
+
+
+
=
Λ
9.10 各々選択された軸位置でのトルク偏差ΔTe, φを,次の式によって求める。
ϕ
ϕ
e,
ma
e,
e,
Δ
T
T
T
−
=
9.11 1完全モータ周期当たりの平均トルク偏差ΔTe, maを,次の式によって求める。
z
T
T
T
T
T
z
ϕ
ϕ
ϕ
ϕ
e,
3
e,
2
e,
1
e,
ma
e,
Δ
Δ
Δ
Δ
Δ
+
+
+
+
=
Λ
9.12 トルク偏差指標IrTを,次の式によって求める。
ma
e,
ma
e,
Δ
T
T
IrT=
又は
7
B 8397-1:2008 (ISO 4392-1:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
z
z
T
T
T
T
T
T
T
T
T
T
Ir
ϕ
ϕ
ϕ
ϕ
ϕ
ϕ
e,
2
e,
1
e,
e,
ma
e,
2
e,
ma
e,
1
e,
ma
e,
+
+
+
−
+
+
−
+
−
=
Λ
Λ
9.13 平均トルク効率ηhm, maを,次の式によって求める。
π
×
=
2
Δ
i
ma
e,
ma
hm,
V
p
T
η
9.14 ピークからピークの相対トルクの変動δTeを,次の式によって求める。
ma
e,
min
e,
max
e,
e
T
T
T
T
−
=
δ
ここに, Te, max: 選択した軸位置における最大トルク
Te, min: 選択した軸位置における最小トルク
10 試験報告書
10.1 一般
個々の試験回転速度及び圧力で,それに関連する試験データの表示及び10.3に示す情報は,すべて試験
報告書に記録しなければならない。
注記 試験データの表示及び10.3に示す情報以外に,試験年月日,試験者などの情報を記録しておく
のが望ましい。
10.2 試験データの表示
測定値及び測定値を基に計算された結果は,すべて表及び適切なグラフにして表さなければならない。
10.3 試験データ
次の試験データは,試験報告書に含めなければならない。
a) モータの形式及び種類
b) 使用した測定精度の等級(附属書A参照)
c) 油圧試験回路及び機器の形式
d) 試験流体の種類
e) 流体の動粘度(6.3参照)
f)
流体の温度θ[7 a) 参照]
g) 一定圧力及び一定回転速度で回転角度を関数とした流量
h) 一定圧力,一定回転速度及び一定温度で回転角度を関数としたトルク
i)
幾何学的押しのけ容積Vg又は推定押しのけ容積Vi
j)
1完全モータ周期における平均流量qVe, ma(9.2参照)
k) 1完全モータ周期における平均流量偏差ΔqVe, ma(9.4参照)
l)
流量偏差指標IrqV(9.5参照)
m) 1 min−1での容積効率ηv, ma(9.6参照)
n) ピークからピークの相対流量偏差δqVe(9.7参照)
o) 1完全モータ周期における平均トルクTe, ma(9.9参照)
p) 1完全モータ周期における平均トルク偏差ΔTe, ma(9.11参照)
q) トルク偏差指標IrT(9.12参照)
8
B 8397-1:2008 (ISO 4392-1:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
r) 平均トルク効率ηhm, ma(9.13参照)
s)
ピークからピークの相対トルク変動δTe(9.14参照)
9
B 8397-1:2008 (ISO 4392-1:2002)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
測定精度の等級
序文
この附属書は,測定精度の等級について規定する。
A.1 測定精度の等級
試験は,要求精度に応じて受渡当事者間の協定のもとA,B及びCの測定精度等級のうちの一つで実施
する。
注記1 等級A及び等級Bは,性能をより正確に定義する必要のある特別の場合を意図している。
注記2 等級A及び等級Bは,より正確な器具及び方法を必要とするので,試験のコストが上昇する
おそれがある。
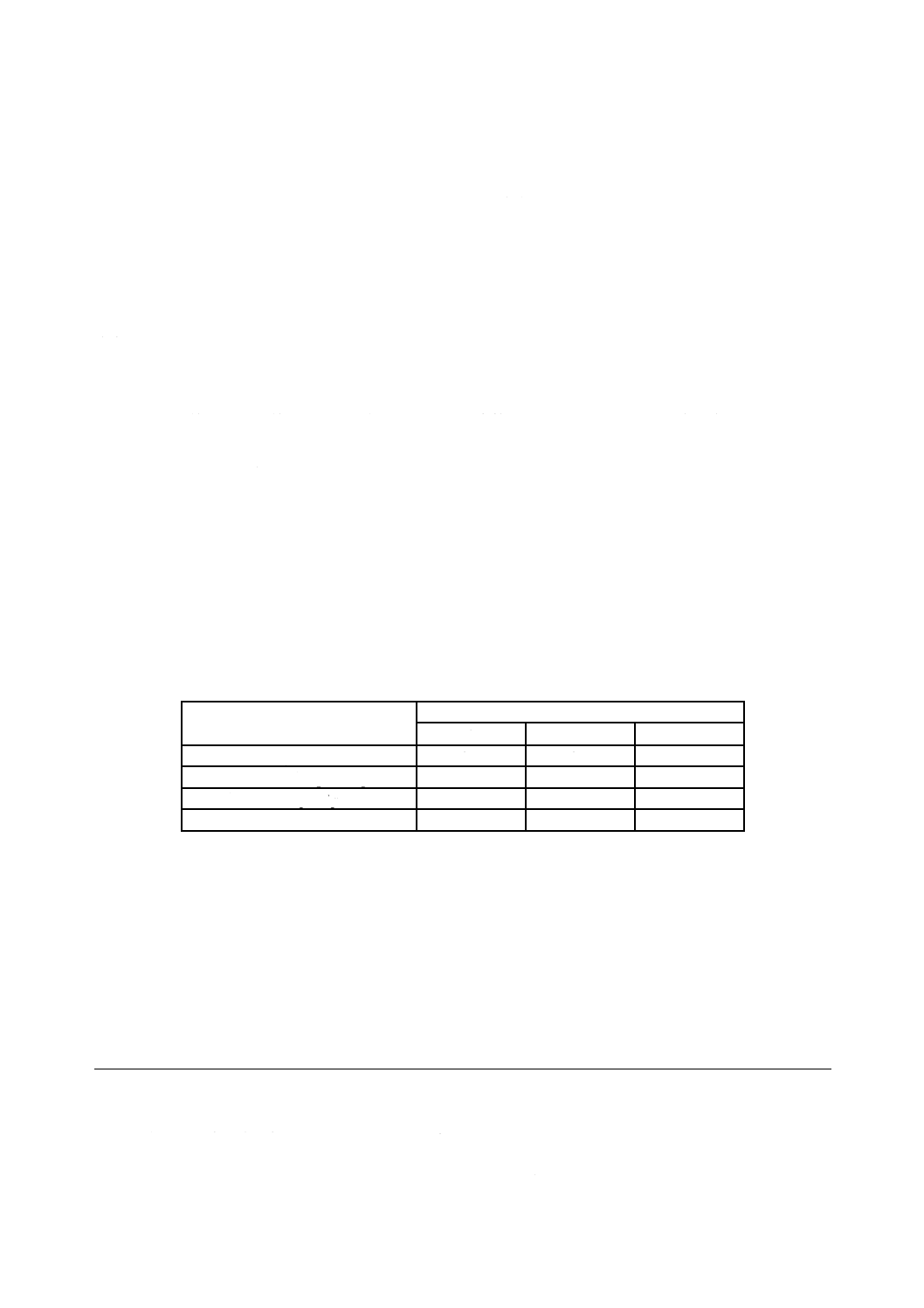
A.2 系統誤差
試験に用いる装置又は手法は,校正又は国際標準器との比較において,その系統誤差が表A.1に規定し
た限度を超えないことが証明されているものでなければならない。
注記 表A.1に規定した限度は,測定対象の量にかかわるものであり,測定器の最大指示値の百分比
ではない。
表A.1−校正中に決定される測定器の許容系統誤差
測定項目
各測定精度等級及び許容系統誤差
A
B
C
出力トルク T2, e %
±1.5
±3
±5
総流入/流出流量 qV1, t, e / qV2, t, e %
±2
±4
±6
入口/出口圧力 p1, e / p2, e %
±0.8
±1.5
±3
入口/出口温度 θ1, e / θ2, e ℃
±0.5
±1
±2
参考文献
JIS B 8384 油圧−容積式ポンプ・モータ及び一体形トランスミッション−定常状態における性能測定
注記 対応国際規格:ISO 4409 : 1986,Hydraulic fluid power−Positive displacement pumps, motors and
integral transmissions−Determination of steady-state performance (IDT)