4
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
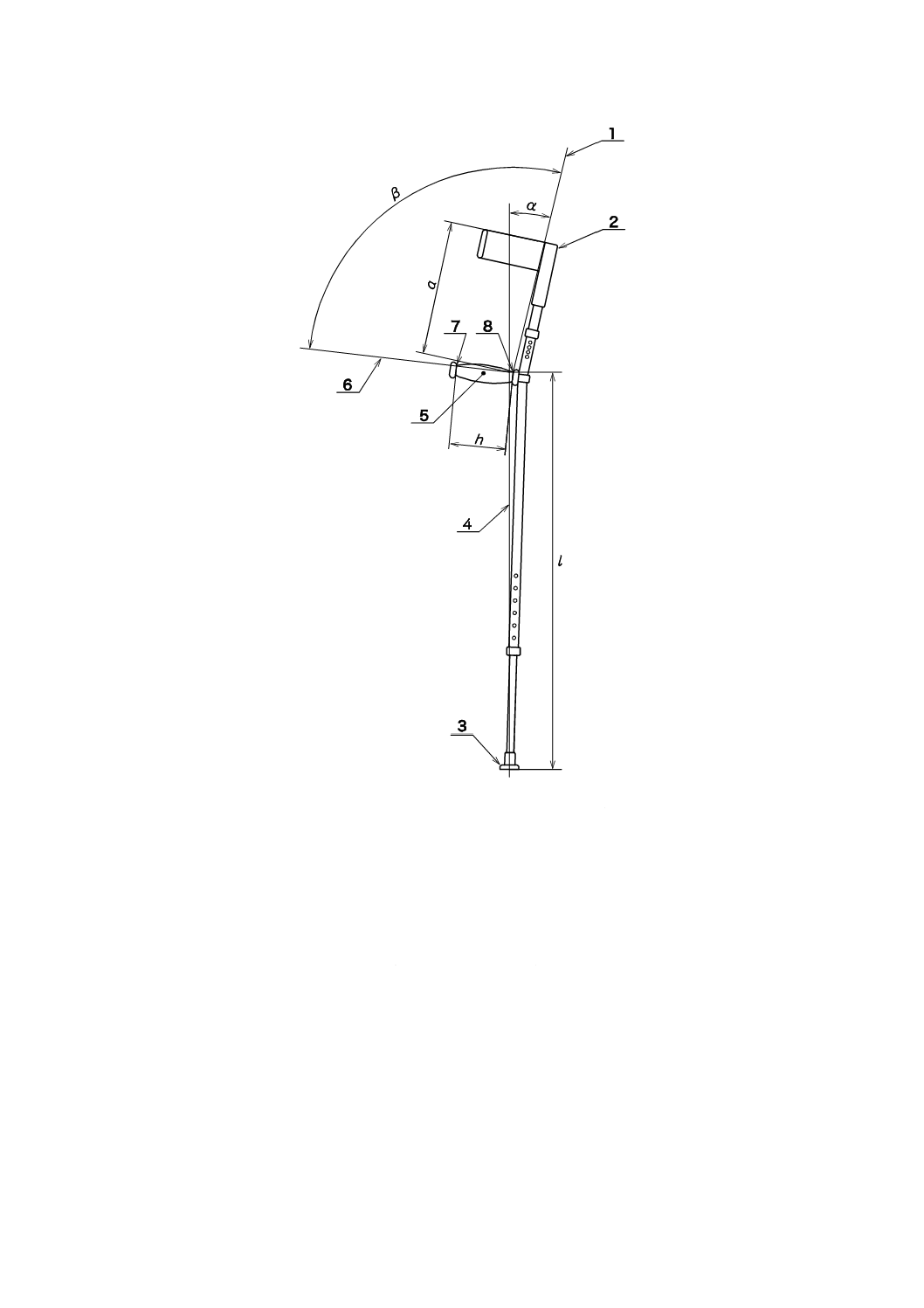
記号
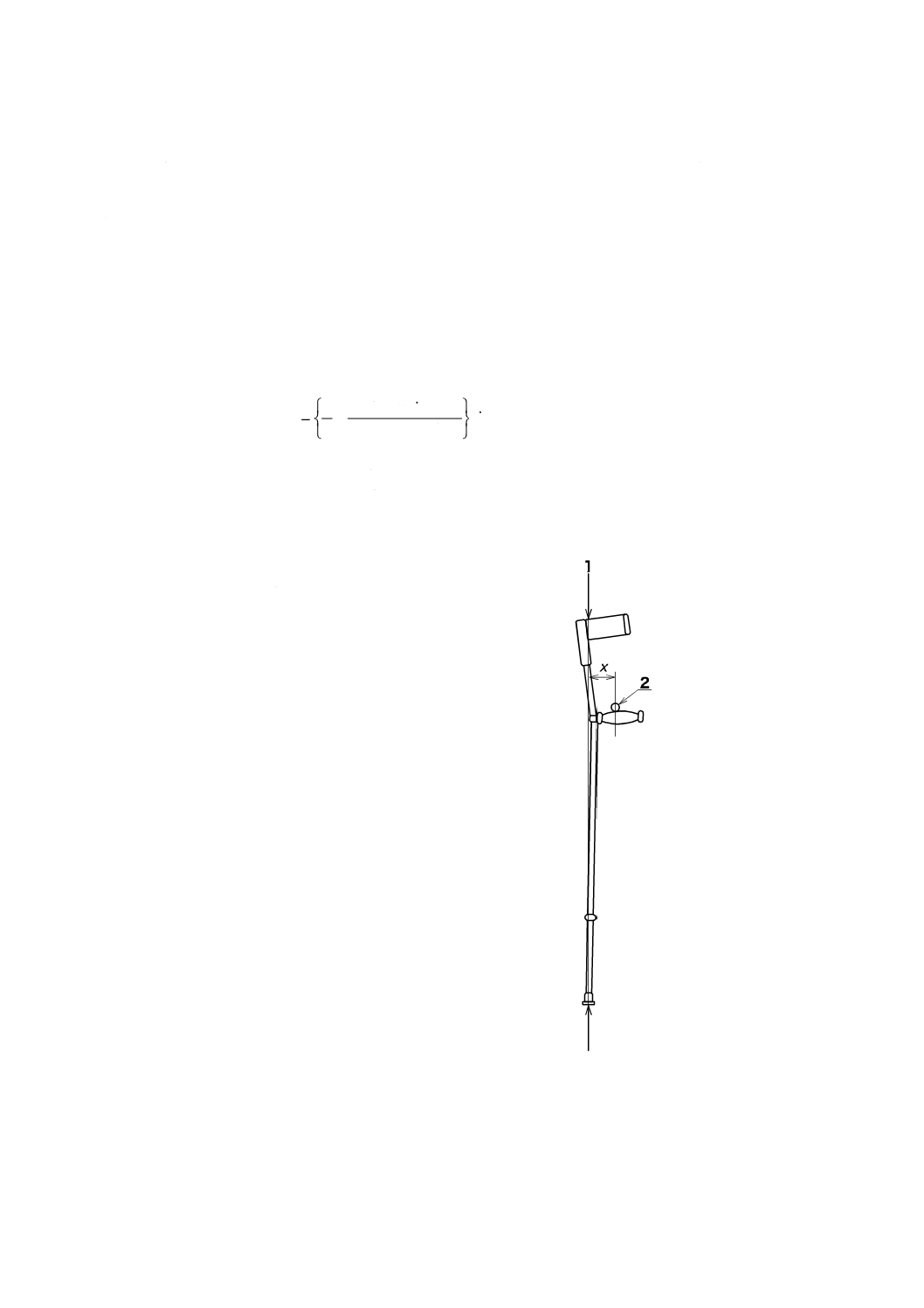
1
カフサポート線
2
カフ
3
先ゴム
4
脚部軸
5
ハンドグリップ
6
ハンドグリップサポート線
7
ハンドグリップ前方参照点
8
ハンドグリップ後方参照点
a
腕部長さ
h
ハンドグリップ長さ
α
サポート角
β
グリップ角
l
脚部長さ
図1−エルボークラッチの例及び各部の名称
T 9266:2012
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲························································································································· 1
2 引用規格························································································································· 1
3 用語及び定義 ··················································································································· 1
4 リスクマネジメントによる設計 ··························································································· 5
5 外観及び構造 ··················································································································· 6
5.1 外観 ···························································································································· 6
5.2 構造 ···························································································································· 6
6 性能······························································································································· 6
7 試験方法························································································································· 6
7.1 試験条件 ······················································································································ 6
7.2 前腕引抜き試験 ············································································································· 6
7.3 ハンドグリップ一体性試験 ······························································································ 7
7.4 静的強度試験 ················································································································ 7
7.5 耐久性試験 ··················································································································· 9
7.6 低温落下試験 ················································································································ 9
8 検査······························································································································ 10
8.1 検査の種類及び検査項目 ································································································ 10
9 表示······························································································································ 10
10 取扱説明書 ··················································································································· 11
附属書JA(参考)設計における配慮事項 ················································································· 12
附属書JB(参考)JISと対応国際規格との対比表 ······································································ 14
T 9266:2012
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法に基づき,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本
工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
T 9266:2012
福祉用具−歩行補助具−エルボークラッチ
Assistive products for walking-Elbow crutches
序文
この規格は,2007年に第2版として発行されたISO 11334-1を基とし,試験方法を明確にするために,
技術的内容を変更して作成した日本工業規格である。
なお,この規格で点線の下線を施してある箇所は,対応国際規格を変更している事項である。変更の一
覧表にその説明を付けて,附属書JBに示す。また,附属書JAは対応国際規格にはない事項である。
1
適用範囲
この規格は,歩行を補助する前腕支持部及び握り部で構成し,歩行を補助するエルボークラッチについ
て規定する。
注記1 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
ISO 11334-1:2007,Assistive products for walking manipulated by one arm−Requirements and test
methods−Part 1: Elbow crutches(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
注記2 ロスフトランドクラッチもエルボークラッチに含む。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。この引用
規格は,その最新版(追補を含む。)を適用する。
JIS T 0102 福祉関連機器用語[支援機器部門]
注記 対応国際規格:ISO 9999,Assistive products for persons with disability−Classification and
terminology(MOD)
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS T 0102によるほか,次による(図1〜図3参照)。
3.1
ハンドル(handle)
ハンドグリップが付いている部位。
3.2
ハンドグリップ(handgrip)
エルボークラッチを使用中に通常手で握る部分(図1の5参照)。
2
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.3
アナトミックハンドグリップ(anatomic handgrip)
手の形状に合わせて握りやすく作られたハンドグリップ。
3.4
ハンドグリップ長さ(handgrip length)
手を置くハンドグリップの長軸方向に測った長さで,先端と終端の一番低くなった点との間の距離(図
1及び図2参照)。
注記 終端がない場合は,最大のハンドグリップ長さは110 mmとする。
3.5
ハンドグリップ幅(handgrip width)
手を置くハンドグリップの最も太い部分を水平方向に測った長さ(図2の5参照)。
3.6
ハンドグリップ前方参照点(front handgrip reference point)
ハンドグリップ先端の止めの隣でハンドグリップ長さを測定する起点(図1の7及び図2の6参照)。
3.7
ハンドグリップ後方参照点(rear handgrip reference point)
ハンドグリップ終端の隣でハンドグリップ長さを測定する終点(図1の8及び図2の7参照)。
3.8
ハンドグリップサポート線(handgrip support line)
ハンドグリップの前方参照点と後方参照点とを結んだ線(図1の6及び図2の4参照)。
3.9
基準点(datum)
ハンドグリップの上面でハンドグリップ後方参照点から1/3の点(図2の3参照)。
3.10
腕部(arm section)
ハンドグリップ後方参照点の上の部分。
3.11
脚部(leg section)
ハンドグリップ後方参照点の下の部分。
3.12
カフ(cuff)
前腕を正しい位置に保持し,横への動きを抑える機能を有するエルボークラッチの前腕支持部(図1の
2参照)。
3.13
カフサポート線(cuff support line)
ハンドグリップ後方参照点とカフの内側の底で腕部を最も伸ばした点とを結ぶ線(図1の1及び図2の
1参照)。
3.14
カフ内部幅(cuff internal width)
カフの内部最大寸法(図3のy参照)。
3
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.15
カフ内部深さ(cuff internal depth)
カフの内部寸法で前から後へ測った寸法(図3のx参照)。
3.16
カフ内部高さ(cuff internal height)
カフサポート線とほぼ平行に測ったカフの内部寸法(図2のz参照)。
3.17
先ゴム(tip)
エルボークラッチの脚部が地面と接触する部分に取り付けたゴム製のキャップ(図1の3参照)。
3.18
脚部軸(leg section axis)
ハンドグリップ後方参照点と脚部を最も伸ばした時の先ゴムの中心とを結んだ線(図1の4参照)。
3.19
腕部長さ(arm section length)
ハンドグリップ後方参照点とカフサポート線がカフの内部に接触する最も高い点との距離(図1のa参
照)。
3.20
脚部長さ(leg section length)
ハンドグリップ後方参照点と先ゴムの底の中心との距離(図1のl参照)。
3.21
サポート角(support angle)
脚部の軸とカフサポート線との角度(図1のα参照)。
3.22
グリップ角(grip angle)
カフサポート線とハンドグリップサポート線とによる角度(図1のβ参照)。
4
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号
1
カフサポート線
2
カフ
3
先ゴム
4
脚部軸
5
ハンドグリップ
6
ハンドグリップサポート線
7
ハンドグリップ前方参照点
8
ハンドグリップ後方参照点
a
腕部長さ
h
ハンドグリップ長さ
α
サポート角
β
グリップ角
l
脚部長さ
図1−エルボークラッチの例及び各部の名称
5
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
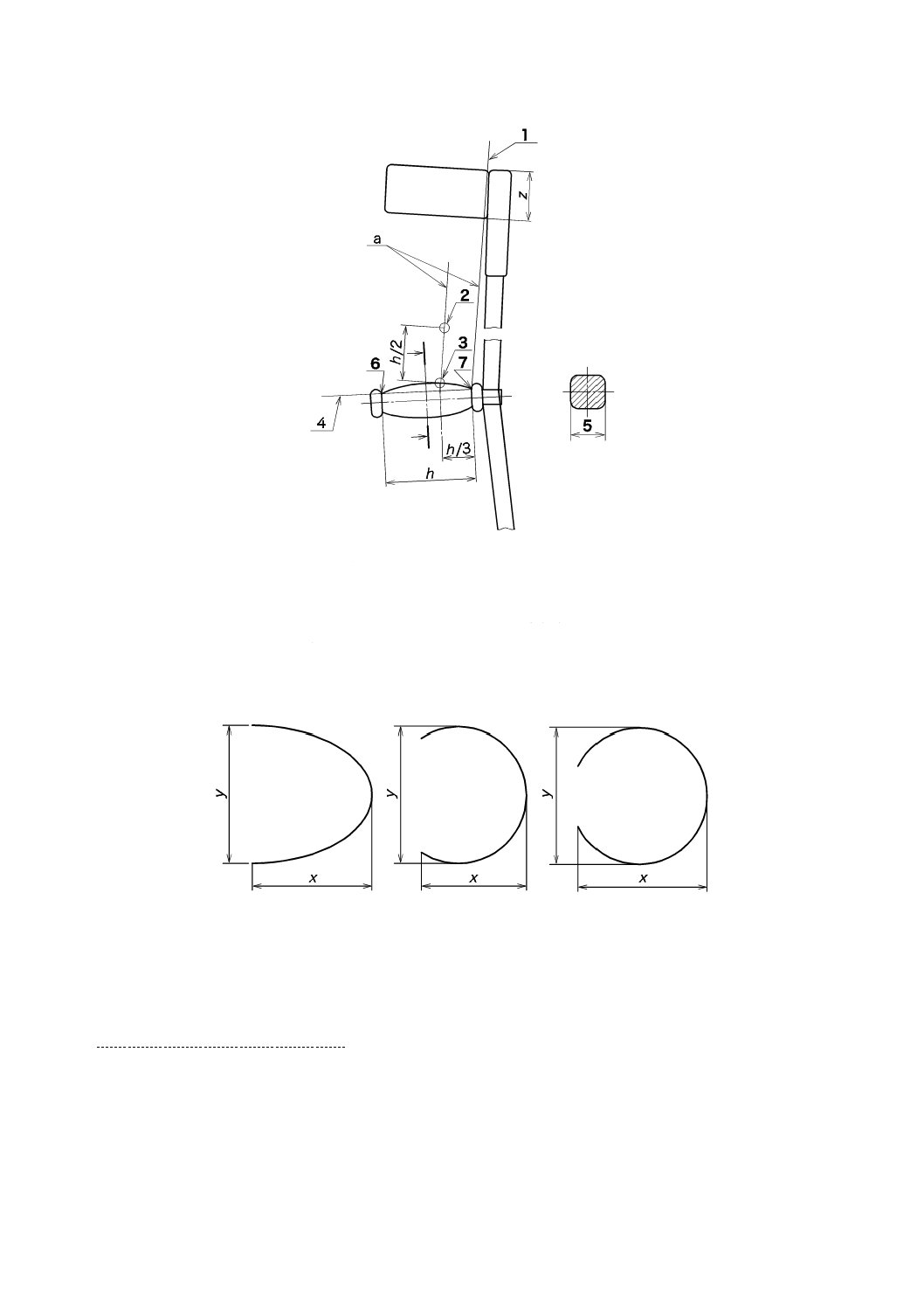
記号
1
カフサポート線
2
手首ヒンジポイント
3
基準点
4
ハンドグリップサポート線
5
ハンドグリップ幅
6
ハンドグリップ前方参照点
7
ハンドグリップ後方参照点
h
ハンドグリップ長さ
z
カフ内部高さ
a
平行線
図2−エルボークラッチの詳細
記号
x
カフ内部深さ
y
カフ内部幅
図3−カフの寸法の定義
4
リスクマネジメントによる設計
リスクマネジメントによる設計は,隙間に手及び足の指が挟まるリスクについて実施する。これは,製
造業者又は販売業者が実施するもので,実施手順及び結果を文書化し維持しなければならない。また,関
連する要因として附属書JA(参考)に例示した事項を設計において配慮することが望ましい。
6
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5
外観及び構造
5.1
外観
衣類を損傷したり,使用者に不快感を与えるばり,鋭いエッジ及び突起があってはならない。
5.2
構造
構造は,次による。
a) 前腕に対するカフ内部深さはカフ内部幅の半分以上とし,前面に開口をもたなければならない。
b) ハンドグリップ幅は25 mm以上で50 mmを超えてはならない。ただし,アナトミックハンドグリッ
プには適用しない。
c) 脚の先端に先ゴムを付け,使用中に脚部がその先ゴムを貫通してはならない。
d) 先ゴムは交換可能な構造とする。
e) 歩行路面と接触する先ゴムの底面は,直径35 mm以上なければならない。
f)
高さ調節は,伸張可能な最高位置をエルボークラッチに表示する。
6
性能
性能は,表1による。
表1−性能
項目
基準
試験項目
前腕の引抜き
120 Nの引抜き力によって外れなければならない。このとき,
開口は75 mmまで広がり,永久変形量は5 mm以下とする。
7.2
ハンドグリップの一体性
離れてはならない。
7.3
静的強度
脚部がその先ゴムを貫通してはならない。
高さ調節は緩んではならない。
亀裂又は破損があってはならない。
7.4
耐久性
脚部がその先ゴムを貫通してはならない。
高さ調節は緩んではならない。
亀裂又は破損があってはならない。
7.5
低温時の落下
亀裂又は破損があってはならない。
7.6
7
試験方法
7.1
試験条件
試験条件は,次による。
a) 試験は室温21 ℃±5 ℃で行う。
b) 長さ調節は最大にして試験を行う。
c) 試験は前腕引抜き,ハンドグリップ一体性,静的強度,耐久性,低温落下の順で行い,全ての試験を
1本の供試体とする。
d) 明白な欠損などは全て試験報告書に記入し,引き続き行う試験による異常と確実に区別する。
7.2
前腕引抜き試験
前腕引抜き試験は,次による。
a) 引抜き試験を実施する直前にカフの開口部の幅を測定する。
b) カフの開口部が75 mm以下のエルボークラッチに適用する。
c) 直径75 mm±2 mmのシリンダ(円筒)をカフの内側に入れ,カフ開口部を通して引き抜き,このと
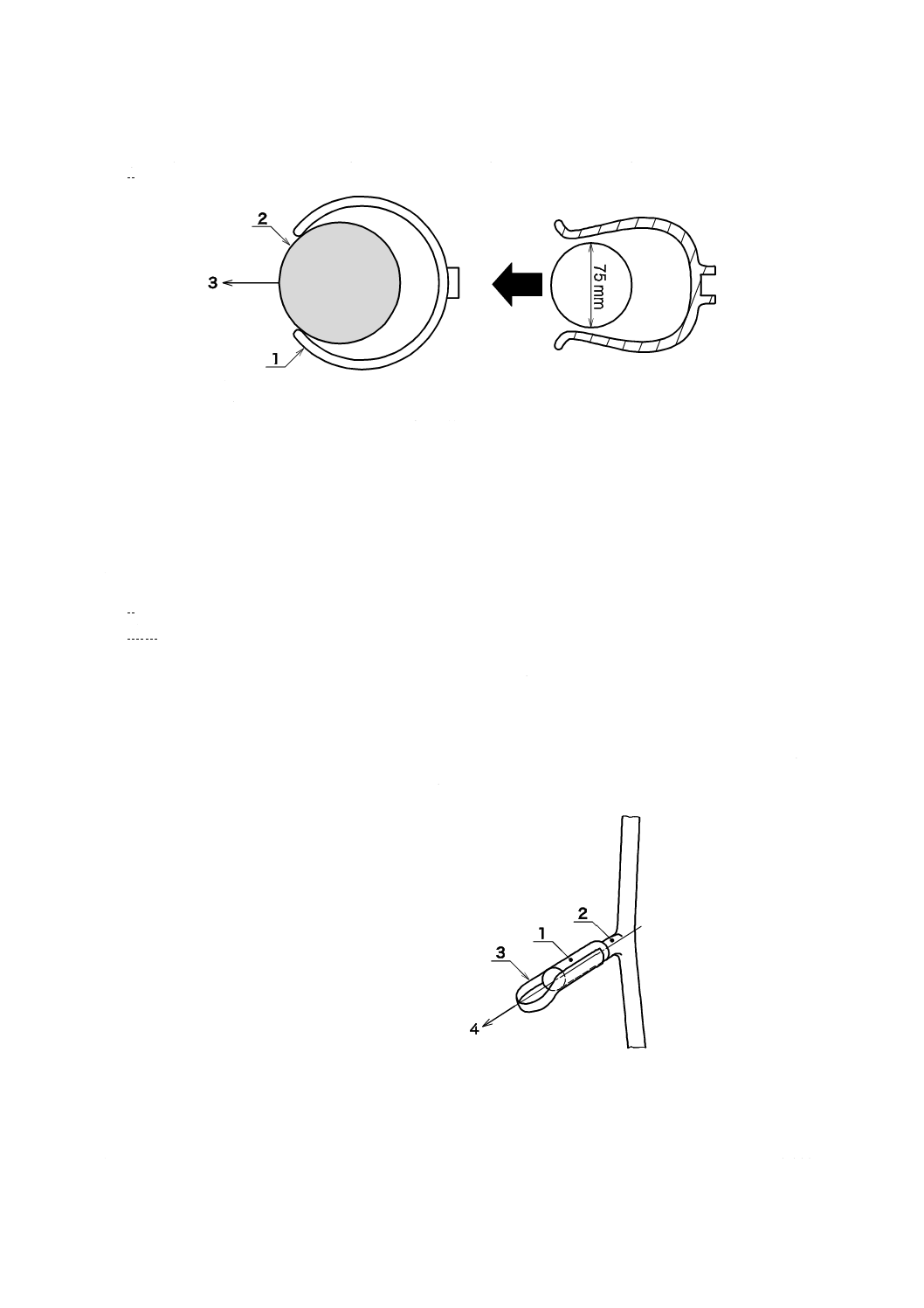
7
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
きに要した引抜き力を測定する(図4参照)。
d) c) の試験を行った後にa) で測定した位置の幅を測定し,その差を永久変形量とする。
記号
1
カフ
2
直径75 mm±2 mmのシリンダ(円筒)
3
引抜き方向
図4−前腕引抜き試験
7.3
ハンドグリップ一体性試験
ハンドグリップ一体性試験は,次による。
a) ハンドグリップをエルボークラッチにはめ込むだけで固定する構造のハンドグリップに適用する。
b) a) に加えリベット締めのある構造のハンドクリップに対する試験の要否は,受渡当事者間の協定によ
る。
c) ハンドグリップがフリーとなるような形で,エルボークラッチ本体を固定する。
d) ハンドグリップに,試験する部位を含む全ての結合部の補強とならない方法で負荷用ストラップを接
着などの方法によって取り付ける。
e) 負荷用ストラップによって,500 N±2 %の試験力を2秒以上の時間をかけて負荷し,10秒間保持する
(図5参照)。ただし,最大使用者体重が100 kgでない場合,最大使用者体重1 kg当たり5.0 N±2 %
の力を試験力とする。この試験力は,175 N±2 %を下回ってはならない。
記号
1
ハンドグリップ
2
ハンドル
3
力の負荷用ストラップ
4
力の負荷方向
図5−ハンドグリップ一体性試験
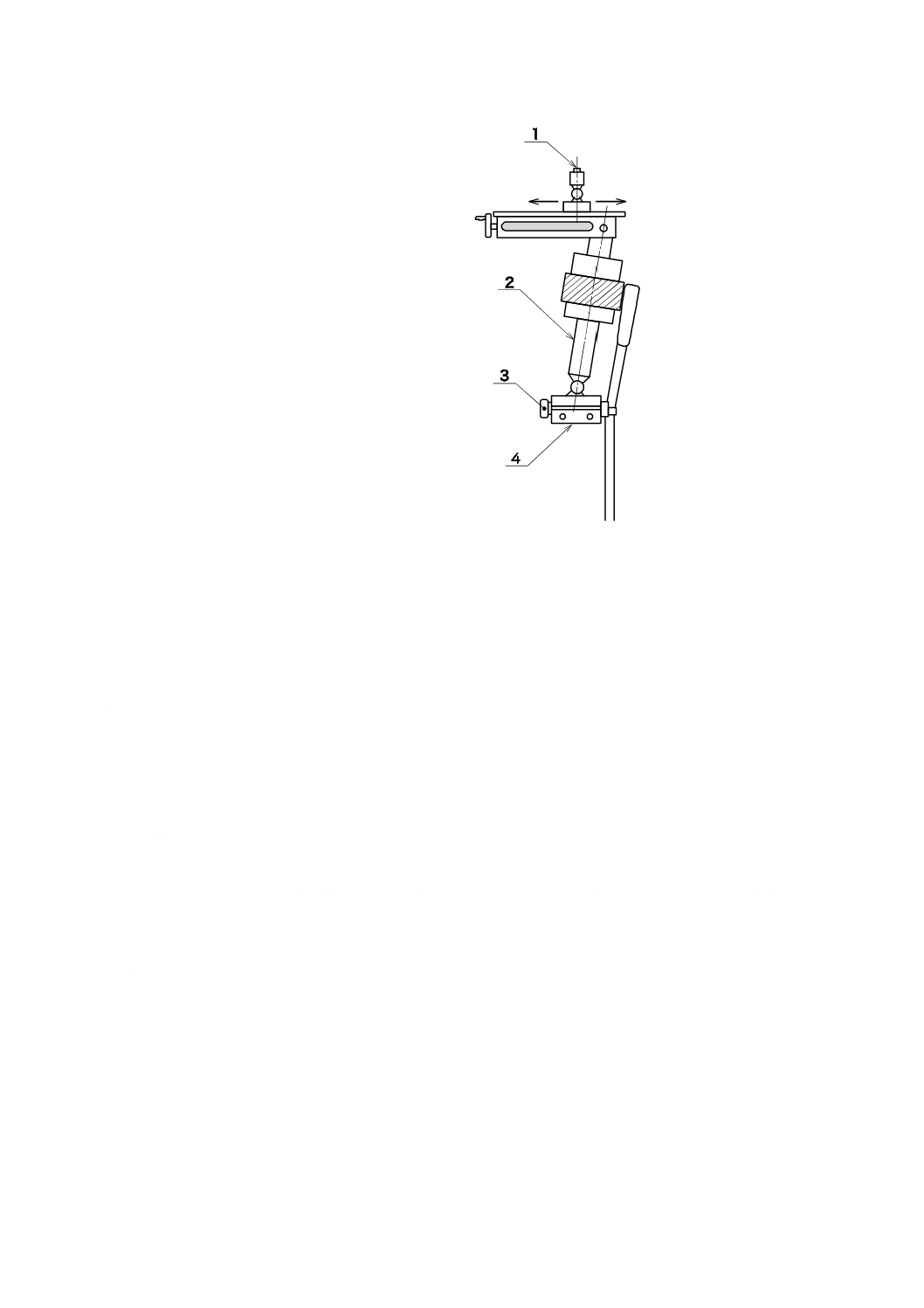
7.4
静的強度試験
静的強度試験は,次による。
a) 供試体に負荷用ジグ(以下“ダミー”という)を介して,ダミーの上からダミーの質量を含み1 000 N
8
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
±2 %相当の試験力を2秒以上の時間をかけて負荷し,10秒以上保持する(図7参照)。ただし,最大
使用者体重が100 kgでない場合,最大使用者体重1 kg当たり10.0 N±2 %の力を試験力とする。この
試験力は,350 N±2 %を下回ってはならない。
b) 試験力とダミーとの間の回転ジョイントは,力を受けたエルボークラッチの変形で全ての方向に少な
くとも15°動かせるような設置とする。
c) ダミーフォアアームとダミーハンドとの間のヒンジはダミーハンドがハンドグリップに固定されてい
るときに,ダミーフォアアームが前後左右方向に少なくとも4°動くものとする。
d) 力の負荷ラインは,先ゴムの中心と基準点からクラッチの後方に距離Xの点とを通る鉛直負荷ベクト
ルとして記述され,Xは,次の式によって求める(図1及び図6参照)。その結果を整数(mm)に丸
め,負荷位置を決定する。
α
α
α
sin
65
.0)
cos
(
sin
3
×
+
×
×
+
=
a
l
a
l
h
X
ここに,
X: 力の負荷ラインまでの距離(mm)
h: ハンドグリップの長さ(mm)
l: 脚部長さ(mm)
a: 腕部長さ(mm)
α: サポート角度(°)
記号
1
力の負荷ライン
2
基準点
X
基準点から力の負荷ラインまでの距離
図6−静的/動的強度試験の荷重位置
9
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記号
1
力の負荷点
2
ダミーフォアアーム
3
ハンドグリップ
4
ダミーハンド
図7−ダミーの例
7.5
耐久性試験
耐久性試験は,次による。
a) 7.4と同じ負荷方法によって,ダミーの上からダミーの質量を含み550 N±2 %相当の試験力を100万
回繰り返し負荷した後に,力を除去する。ただし,最大使用者体重が100 kgでない場合,最大使用者
体重1 kg当たり5.5 N±2 %の力を試験力とする。この試験力は,192.5 N±2 %を下回ってはならない。
b) 力の負荷頻度は毎分300回を超えてはならない。
c) 毎分60回以上の速度で試験を行い,性能を満たさなかった場合には,新しい供試体で毎分60回を上
回らない速度で試験を行う。
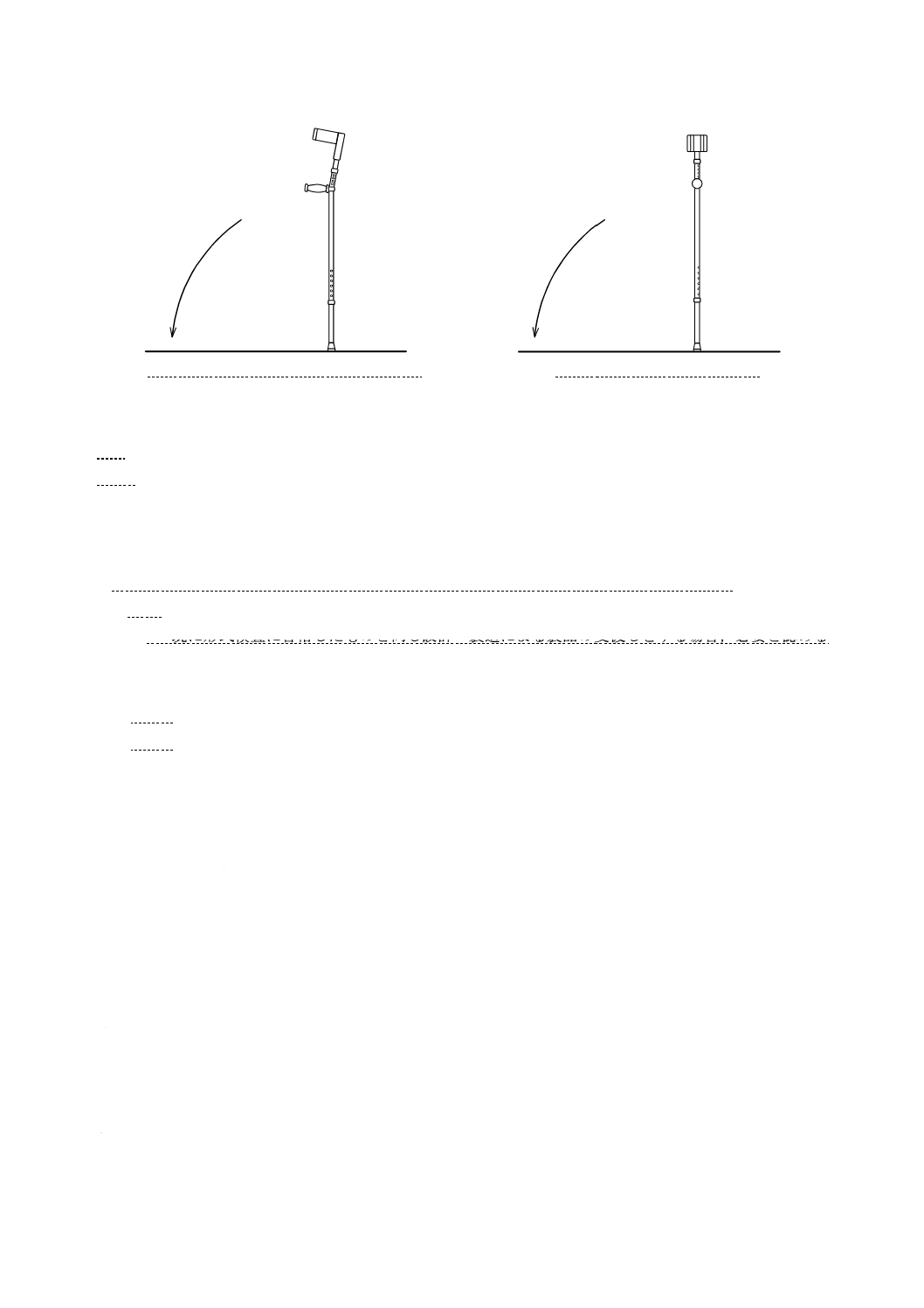
7.6
低温落下試験
低温落下試験は,次による。
a) 供試体を−25 ℃±2 ℃の環境に設定した恒温槽内に24時間放置した後取り出し,30秒以内に先ゴム
を床面におき直立状態とする。
b) コンクリート床面に供試体自体の重さで前方(ハンドグリップ側に倒れるよう)に落下(転倒)させ
る操作を5回繰り返す[図8のa) を参照]。
c) 次に,側方(横向き:ハンドグリップに対してほぼ90°)に倒れるように5回繰り返す[図8のb) を
参照]。
d) この試験は,恒温槽からエルボークラッチを取り出したときから5分以内までに全ての試験を終了さ
せる。
10
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 前方(ハンドグリップ側)に落下(転倒)
b) 側方(横向き)に落下(転倒)
図8−低温落下試験
8
検査
8.1
検査の種類及び検査項目
エルボークラッチの検査は,形式検査1) と受渡検査2) とに区分し,検査の項目は,それぞれ次の項目
を箇条7及び目視によって試験したとき,箇条5,箇条6,箇条9及び箇条10に適合したものを合格とす
る。
なお,形式検査及び受渡検査の抜取検査の方式は,受渡当事者間の協議によって定める。
注1) 製品の品質が設計で示した全ての特性を満足するかどうか判定するための検査。
2) 既に形式検査に合格したものと同じ設計・製造による製品の受渡しをする場合,必要と認める
特性を満足するものであるかどうかを判定するための検査。
a) 形式検査項目
1) 外観
2) 構造
3) 性能
4) 表示及び取扱説明書
b) 受渡検査項目
1) 外観
2) 表示及び取扱説明書
9
表示
この規格の全ての要求事項に適合したエルボークラッチには,見やすい箇所に容易に消えない方法で,
次の事項を表示しなければならない。
a) 名称又は規格番号
b) 最大使用者体重
c) 製造業者名又は販売業者名及びその住所
d) 製造業者の形式及び製造番号
e) 製造年月又は略号
f)
各部品に高さ調節の最大伸張位置
11
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
10
取扱説明書
取扱説明書には,次の事項を記載しなければならない。
a) 最大腕部の長さ
b) 最小腕部の長さ
c) 最大脚部の長さ
d) 最小脚部の長さ
e) サポート角度
f)
使用上の注意
g) 適切な洗剤の説明を含むクリーニング方法,腐食及び経年劣化を回避するための注意
h) 組立,調整及び折畳み又は引出しの方法
i)
可動部品と固定部品間との安全距離についての予防措置に関する警告
12
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
設計における配慮事項
JA.1
福祉用具に関連して起こる可能性があるハザード及び関連する要因の例
福祉用具に関連して起こる可能性があるハザード及び関連する要因の例を示す。ただし,全てを網羅し
ているわけではなく,ハザード及び要因を特定する手助けとなる。
a) 可動部分(介助者,子供などが手,足,指などを挟み込む構造の存在)に関する危険性
例 エルボークラッチの一部に指を入れた場合に挟まれてけがをしないか。
b) 接触アレルギー誘発性などに関する危険性
例 適切な表示がされているか。
c) 他の機器と併用される場合の不適合性
例 ベッド等からの移乗を行う場合に問題はないか。
d) 廃棄物及び/又は福祉用具の廃棄による汚染
例 ごみとして燃やす場合などに有毒な物質を排出しないか。
e) 不適切な操作説明,例えば,
1) 複雑すぎる操作説明
2) 使いにくい,まとまりのない取扱説明書
例 専門用語を不必要に使っていないか。
f)
合理的に予見できる誤使用
例 前後を反対に使ってしまった場合にも問題はないか。
g) 製品の寿命に関する適切な情報提供
例 一部の部品が他に比べて製品寿命が短いなどの場合
JA.2
人間工学的検討項目の例
高齢者,障害者などの身体機能低下に関連して多様なニーズをもつユーザに対する人間工学的検討項目
の例を示す。ただし,全てを網羅しているわけではなく,要因を特定する手助けとなる。
注記 JIS Z 8071の9.(心身の機能と障害の影響に関する詳細)などが参考となる。
a) 動作能力の低下,筋力の低下及び体力の低下による意図しない動き
例 自動車運転中の反応時間は19歳〜29歳に対し60歳以上は3倍以上(1.5秒〜3.8秒)であった
[1]。
b) 機器の操作力の低下
例 押す力は30歳代に対して60歳代はその約70 %であった [2]。
注記 JIS T 9241-2では,指による操作は5 N,手による操作は105 N,足による操作は300 N,回
転による操作は1.9 Nm以下としている。
c) 認知症を含む使用者の知的能力の低下及び短期記憶能力の低下した使用者による使用
例 短期記憶に関わる単語の再生は,20歳〜29歳では約14語であるのに対し,60歳以上では約7
語であった [3]。
d) 平衡を保ち転倒を避ける能力の低下した使用者による使用
13
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
例 閉眼における立位時の動揺軌跡は,20歳代と60歳代とではその約1.23倍であった [4]。
e) 色知覚能力の低下,視力の低下,聴覚機能の低下,触覚感度の低下などによる不十分な情報取得
例 近距離での生活視力は,35歳〜44歳が約1.05に対して65歳〜74歳では約0.6であった [5]。
参考文献
[1] 独立行政法人産業技術総合研究所・人間福祉医工学研究部門編;人間計測ハンドブック,P.770-771,
2003年9月,朝倉書店
[2] 独立行政法人製品評価技術基盤機構データベースより
http://www.tech.nite.go.jp/human/jp/contents/cdata/coperation/operation-g.html
[3] 佐藤方彦 監修;人間工学基準数値数式便覧,第1版3刷,P.169,1999年3月,技報堂出版
[4] 佐藤方彦 監修;人間工学基準数値数式便覧,第1版3刷,P.97,1999年3月,技報堂出版
[5] 独立行政法人産業技術総合研究所・人間福祉医工学研究部門編;人間計測ハンドブック,P.444,2003
年9月,朝倉書店
JIS T 9241-2 移動・移乗支援用リフト−第2部:移動式リフト
JIS Z 8071 高齢者及び障害のある人々のニーズに対応した規格作成配慮指針
EN BS 12182:1999,Technical aids for disabled persons−General requirements and test methods
14
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JB
(参考)
JISと対応国際規格との対比表
JIS T 9266:2012 福祉用具−歩行補助具−エルボークラッチ
ISO 11334-1:2007 Assistive products for walking manipulated by one arm−
Requirements and test methods−Part 1: Elbow crutches
(I)JISの規定
(II)
国際
規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ご
との評価及びその内容
(V)JISと国際規格との技術的差
異の理由及び今後の対策
箇条番号
及び題名
内容
箇条
番号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範囲 体重制限なし
1
使用者体重35 kg以上
削除
JISは体重が少ない高齢者も対象
とした。
国際規格の見直しの際,提案を行
う。
3 用語及び
定義
アナトミックハンドグ
リップ
追加
ISO規格には規定はない。
実質的な違いはない。
4 リスクマ
ネジメント
による設計
隙間に指が挟まるリス
クについて実施。
追加
JISは指の挟みこみによるリスク
分析を追加。
危険防止のため規定した。
4.5
リサイクル材料の耐久性
削除
JISの耐久性で担保される。
実質的な違いはない。
4.6
一体性試験で各部が分離し
ない。
削除
JISの静的強度及び耐久性によっ
て担保されている。
実質的な違いはない。
7 試験方法 寸法測定の方法など
追加
JIS認証のため試験方法詳細を規
定。
実質的な違いはない。
5.6.1
同等な他の試験方法を認め
ている。
削除
JISは規定する方法だけとする。
実質的な違いはない。
図7,図8
追加
試験内容の理解を助ける
実質的な違いはない。
8 検査
形式検査及び受渡検査
項目を規定。
追加
認証に必要なため規定。
実質的な違いはない。
附属
書A
削除
推奨事項
参考規定のため,実質的な違いは
ない。
附属書JA
設計における配慮事項
追加
設計時の配慮事項を説明した。
実質的な違いはない。
JISと国際規格との対応の程度の全体評価:ISO 11334-1:2007,MOD
2
T
9
2
6
6
:
2
0
1
2
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
15
T 9266:2012
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除 ················ 国際規格の規定項目又は規定内容を削除している。
− 追加 ················ 国際規格にない規定項目又は規定内容を追加している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD ··············· 国際規格を修正している。
2
T
9
2
6
6
:
2
0
1
2
2019年7月1日の法改正により名称が変わりました。まえがきを除き、本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。