R 1682:2007
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 1
3 用語及び定義並びに記号 ···································································································· 1
3.1 用語及び定義 ················································································································ 1
3.2 記号 ···························································································································· 2
4 測定環境 ························································································································· 2
5 試料······························································································································· 3
6 測定原理 ························································································································· 3
7 測定装置 ························································································································· 3
7.1 装置の構成 ··················································································································· 3
7.2 装置 ···························································································································· 3
7.3 装置の校正 ··················································································································· 5
8 測定条件 ························································································································· 5
9 測定手順 ························································································································· 5
10 測定結果の解析 ·············································································································· 5
11 測定結果の報告 ·············································································································· 6
R 1682:2007
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法に基づき,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本
工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に
抵触する可能性があることに注意を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許
権,出願公開後の特許出願,実用新案権又は出願公開後の実用新案登録出願に係る確認について,責任は
もたない。
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
R 1682:2007
ファインセラミックスの高電界における
電界誘起ひずみの測定方法
Test method for piezoelectric strain of fine ceramics at high electric field
序文
ファインセラミックス圧電材料に高い電界を印加して発生する電界誘起ひずみを利用した圧電部品は,
超音波加工機及び医療用超音波診断装置のトランスデューサーとして,また,半導体製造用ステッパ,ガ
ス流量制御,ディーゼルエンジン燃料噴射制御,自動焦点カメラなどの微小位置決め素子として,更にイ
ンクジェットプリンタ用の振動子として多くの分野で実用されている。これらの圧電部品の正確な部品設
計には,高電界における圧電材料の電界誘起ひずみを測定することが必要である。しかしながら,電界誘
起ひずみを高い精度で測定する測定方法は,標準化されたものがなく,部品設計には低電界で測定した圧
電定数が,やむを得ず代用されている。このため,この規格は,ファインセラミックス圧電材料の高電界
における電界誘起ひずみについて,精度と信頼性の高い測定方法を提供し,試験方法の速やかな普及を通
じて,産業発展に資することを目的に制定した。
1
適用範囲
この規格は,ファインセラミックス圧電材料の高電界における電界誘起ひずみの測定方法を規定する。
測定法は,非共振法によって電界−ひずみ曲線を測定する方法とする。この規格が適用できる範囲は,次
による。
印加電界:0〜2 MV/m
周波数:0.1〜1 Hz
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。この引用
規格は,その最新版(追補を含む。)を適用する。
IEC 60483,Guide to dynamic measurements of piezoelectric ceramics with high electromechanical coupling
3
用語及び定義並びに記号
3.1
用語及び定義
この規格で用いる主な用語及び定義は,IEC 60483によるほか,次による。
3.1.1
印加波形
試料に印加する電圧の時間変化の形状。この規格では三角波。
3.1.2
2
R 1682:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
信号発生器
印加波形を制御する装置。
3.1.3
高圧電源
試料に電界を印加する電源。
3.1.4
電界誘起ひずみ
電界印加時のひずみ量。変位量を試料厚さで除した値で表す。
3.1.5
変位計
電界誘起ひずみを測定するために用いる変位測定計。
3.1.6
可動接触子
試料を保持しながら電圧を印加し,電界誘起ひずみに応じて滑らかに動く試料保持部品。
3.1.7
最大印加電界(Emax)
印加電界の最大値。
3.1.8
最大ひずみ量(Smax)
Emaxを印加したときのひずみ量。
3.1.9
残留ひずみ量(Sr)
印加電界を解除したときのひずみ量。
3.1.10
電界−ひずみ曲線
x軸に電界,y軸に電界誘起ひずみ量を連続的にプロットした曲線。
3.2 記号
記号は,表1による。
表1−記号
記号
記号の意味
f
周波数
dmax
見かけの圧電定数 (=Smax/ Emax)
Eh
電界−ひずみ曲線の上昇カーブと下降カーブのひずみ量の差が最大となる電界
Sh
電界Ehのときの上昇カーブと下降カーブのひずみ量の差
Hmax
ひずみの履歴率 (=Sh / Smax)
4
測定環境
温度変化,音響ノイズ及び床振動の少ない場所で測定を行う。測定環境の温度は,23±5 ˚Cとし,相対
湿度は60 %以下とする。
3
R 1682:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5
試料
試料は,次による。
a) 形状 表面が平滑な,焼結体又は単結晶の円板又はく(矩)形板とする。厚さは0.3〜1 mm,大きさ
は円板では,直径が5〜15 mm程度,く(矩)形板では,長辺の長さが5〜15 mm程度,大きさ/厚
さの比が15〜25程度とする。推奨する円板の形状は,厚さ0.5 mm,直径10 mmである。板の両面の
平行度は,最大厚みと最小厚みとの差が平均厚みの±1 %以下であることが望ましい。
b) 電極 真空蒸着法,スパッタリング法などによって薄膜電極を形成する。電極材料は,金などのよう
に,密着性がよく,かつ,変質しないものがよい。電極は,板状試料の両面の全面に形成する。ただ
し,試料端部の面積10 %以下の領域には,電極がなくてもよい。
c) 分極 分極処理された試料を用いる。分極処理した方向は,試料に表示されているものとする。
6
測定原理
試料の両面の電極間に電界を印加し,圧電効果によって発生するひずみを,試料厚さの変化として変位
計によって測定する。電界を増減し,ひずみの変化量を連続的に測定し,電界−ひずみ曲線を描く。
7
測定装置
7.1
装置の構成
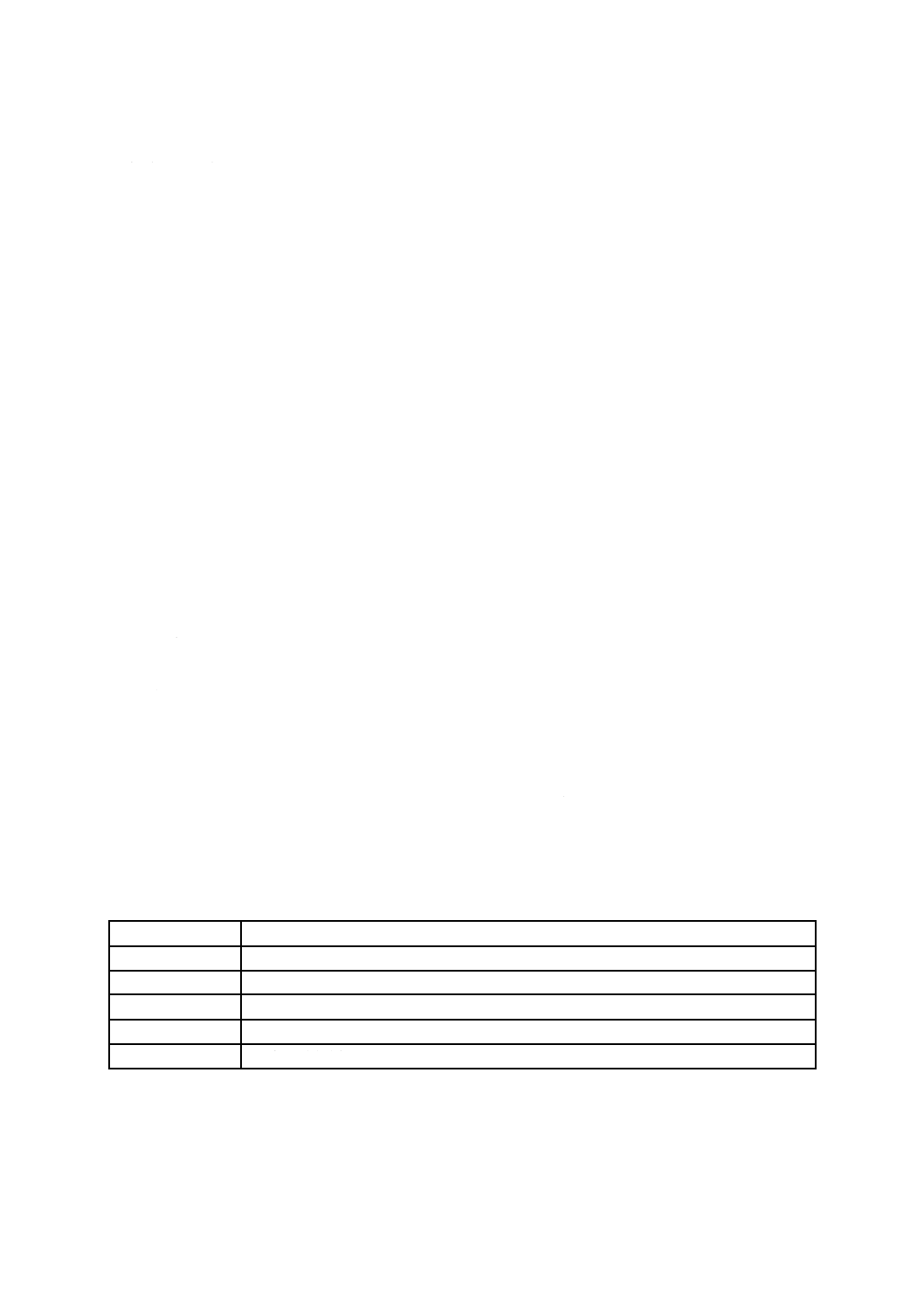
電界−ひずみ曲線測定装置の構成例を,図1に示す。
図1−電界−ひずみ曲線の測定装置の構成例
7.2
装置 装置は,次による。
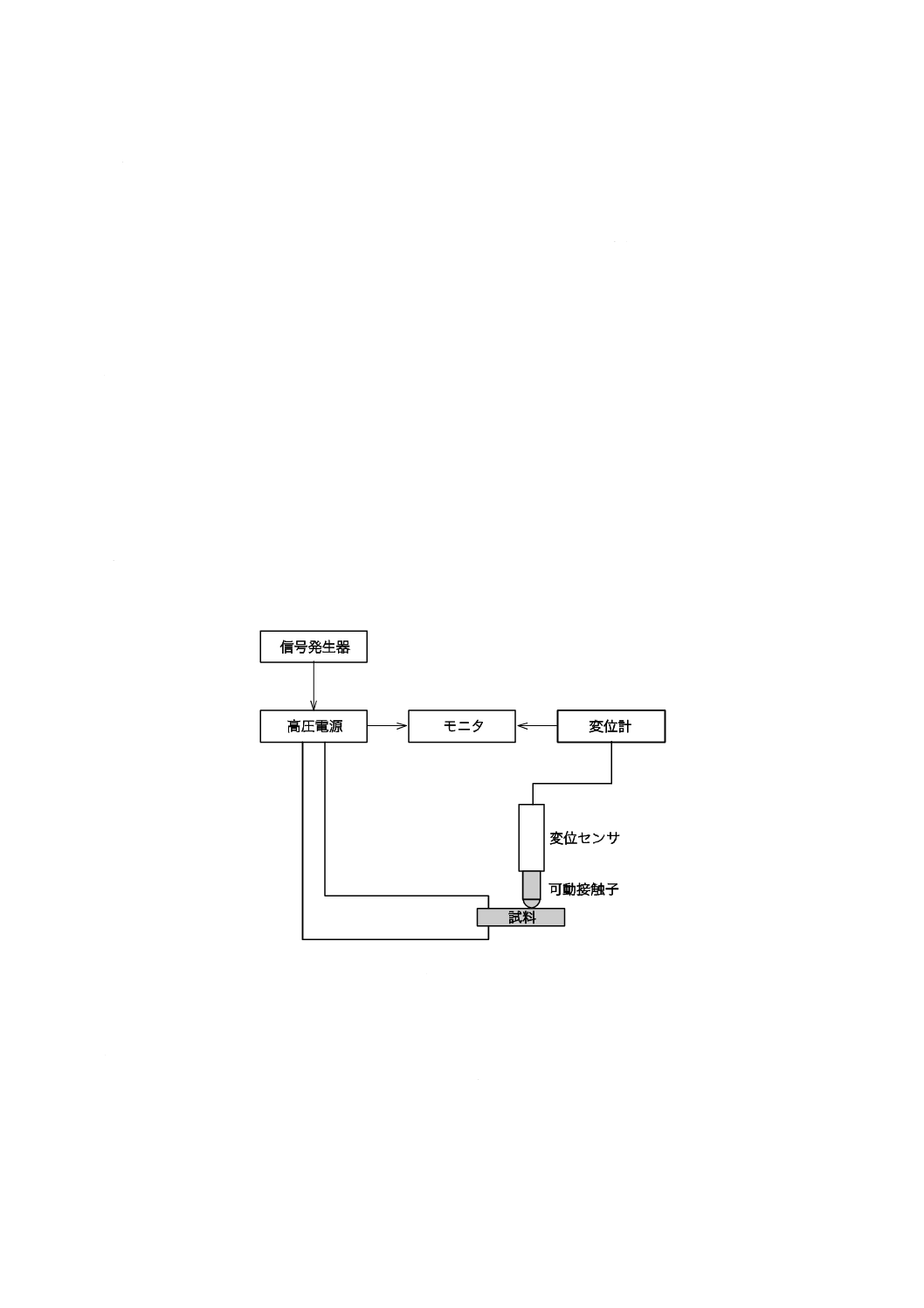
a) 信号発生器 0.1〜1 Hzの三角波を発生できる電源。印加波形の例を,図2に示す。
b) 高圧電源 数kVの電圧を発生できる電源。電圧ゼロの再現性がある高圧アンプ方式とする。
c) 変位計 変位測定精度が±10 nmの装置。変位センサは,接触式の差動トランスゲージ,磁気抵抗素
子式の直線変位計,非接触式のレーザ変位計などのいずれでもよい。
d) モニタ 測定中の印加電圧と変位量との関係をモニタし,データを取り込む。オシロスコープ,AD
4
R 1682:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
変換ボードなどの機器を用いる。
e) 試料ホルダ 試料の両面の電極に電界を印加した状態で安定に保持できる構造をもつ。試料は,水平
又は鉛直に保持する。試料ホルダへの試料の設置は,板状試料を試料台及び可動接触子で挟むことに
よって行う。試料台の先端形状は,平たん(坦)な円形であり,その直径は試料の大きさの30 %以下
であることが望ましい。また,可動接触子の先端形状は,曲率半径2 mm以下の球面が望ましい。水
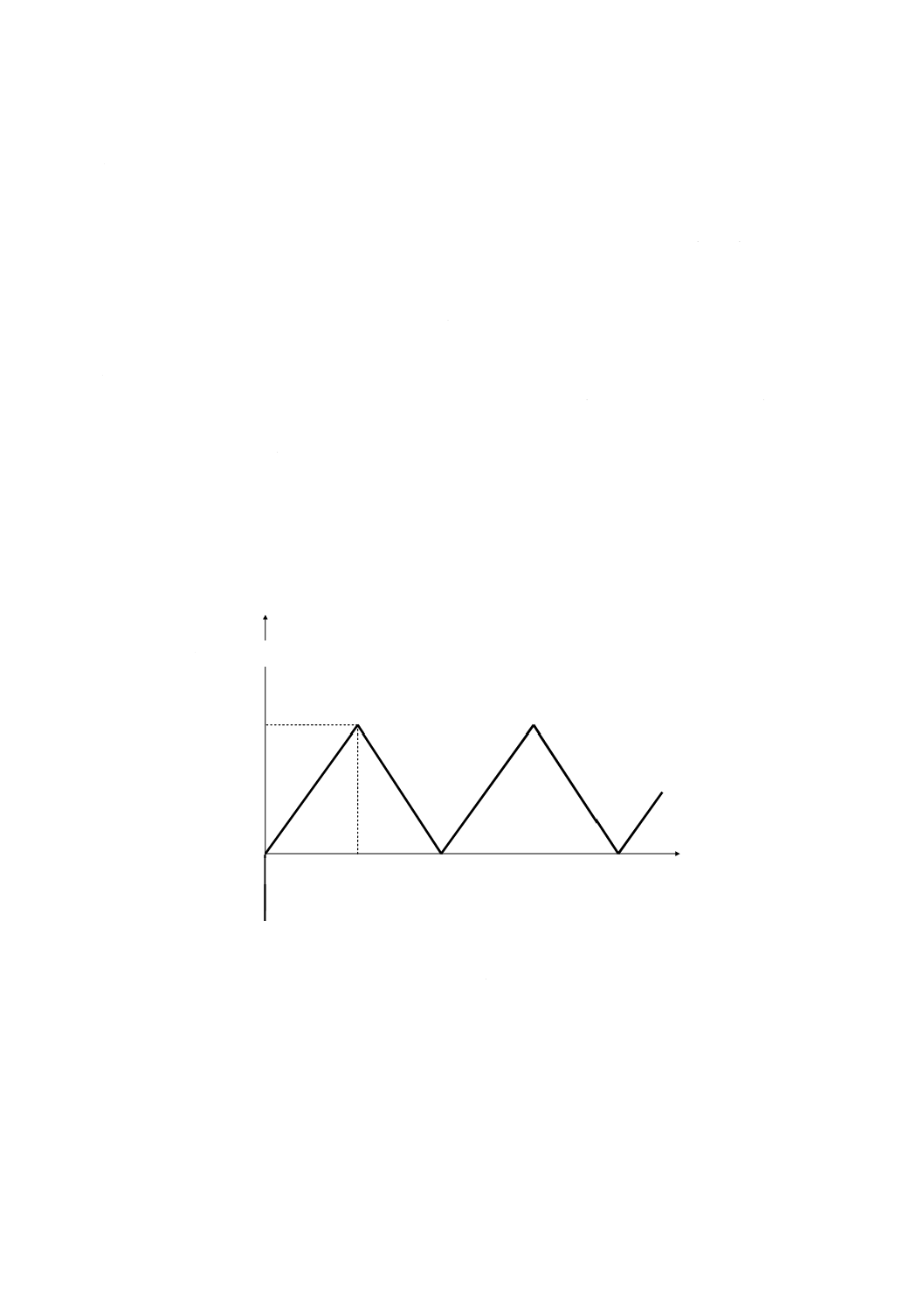
平保持式の試料ホルダの構造例を,図3に示す。図の例では,導電性をもつ鋼製の本体に,試料台(金
めっき加工した黄銅製)を埋め込む。可動接触子(金めっき加工した黄銅製)は,直動ベアリングに
よって支持してある。可動接触子と本体とを絶縁するため,直動ベアリングを,合成樹脂製の上部固
定板に埋め込んだ構造となっている。
f)
試料ホルダの設置雰囲気 床からの振動によるかく乱を避けるため,除振台の上に試料ホルダを設置
し,更に,空気振動又は気流によるかく乱を避け,試料を一定温度に保つため,試料ホルダを合成樹
脂製カバーなどを用いて覆うことが望ましい。また,高電圧印加時の放電防止及び試料温度を一定に
保つために,試料を絶縁性の油に浸せきしてもよいが,非接触式の変位センサを用いる場合には可動
接触子の試料に接する側と反対側の端面が油に浸らないように留意する。
電界
(MV/m)
時間(s)
0
2
0
4
Emax
周波数f= 0.25 Hz
Emax= 1 -2 MV/m
図2−印加波形の例
0
周波数 f = 0.25 Hz
Emax = 1〜2 MV/m
電界
(MV/m)
Emax
時間 (s)
0
0
周波数 f = 0.25 Hz
Emax = 1〜2 MV/m
電界
(MV/m)
Emax
時間 (s)
0
2
4
5
R 1682:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図3−試料ホルダの構造例
7.3
装置の校正
圧電特性及び最大ひずみ量(Smax)が既知の比較試料を用いて,装置の動作試験を行う。測定条件及び測定
手順は,それぞれ箇条8及び箇条9に示す。比較試料について,印加電界1 MV/mで測定したSmaxが,添
付されたデータの範囲内であれば,測定系の精度は,確保されていると考えてよい。範囲外の場合は,可
動接触子の動作を確認し,異常がなければ,信号発生器,高圧電源及び変位計の校正を行う。
8
測定条件
印加する電界は,分極時の電界印加方向と一致した方向だけに電界をかけるユニポーラ測定とする。分
極方向と反対方向に電界を印加しないよう注意する。
印加波形は,三角波を用い,電界0から出発して最大印加電界に達した後に電圧を降下し,0に戻るま
でを1回の測定とする。この場合,周波数fは,電界0から出発して電界0に戻るまでの時間の逆数で定
義される。最大印加電界は,2 MV/m以下で所定の値を選定する。繰返し測定の時間間隔は任意でよい。
9
測定手順
測定手順は,次による。
a) 試料の厚さを,マイクロメータによって1/100 mmの単位まで測定する。3回繰返し測定し,平均値を
算出する。
b) 試料を,試料ホルダに保持する。
c) 測定は,所定の最大印加電界について連続して5回行い,そのうちの3,4,5回目の測定データを採
用する。電界−ひずみ曲線の測定データは,1回の測定当たり100点以上を採取することが望ましい。
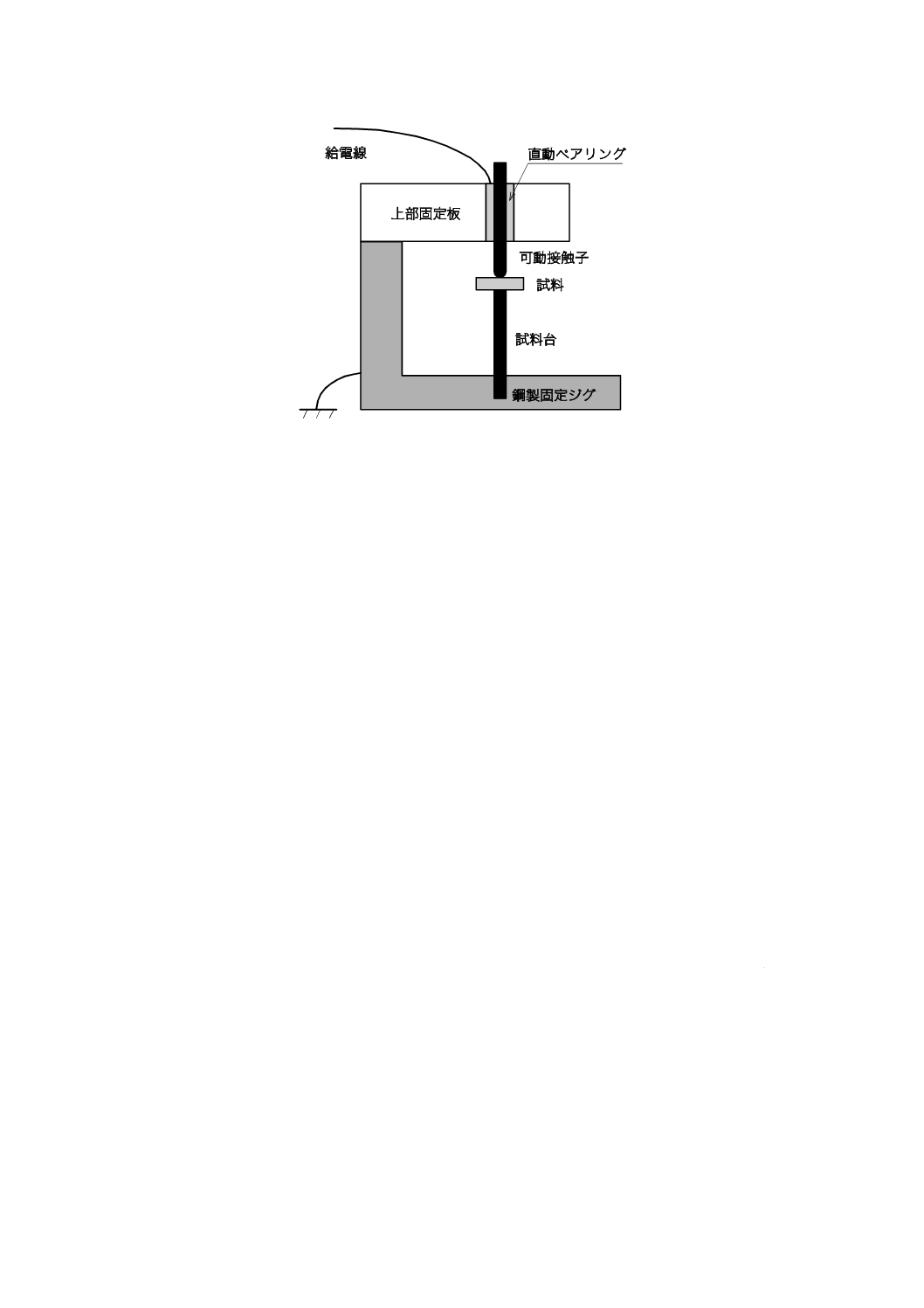
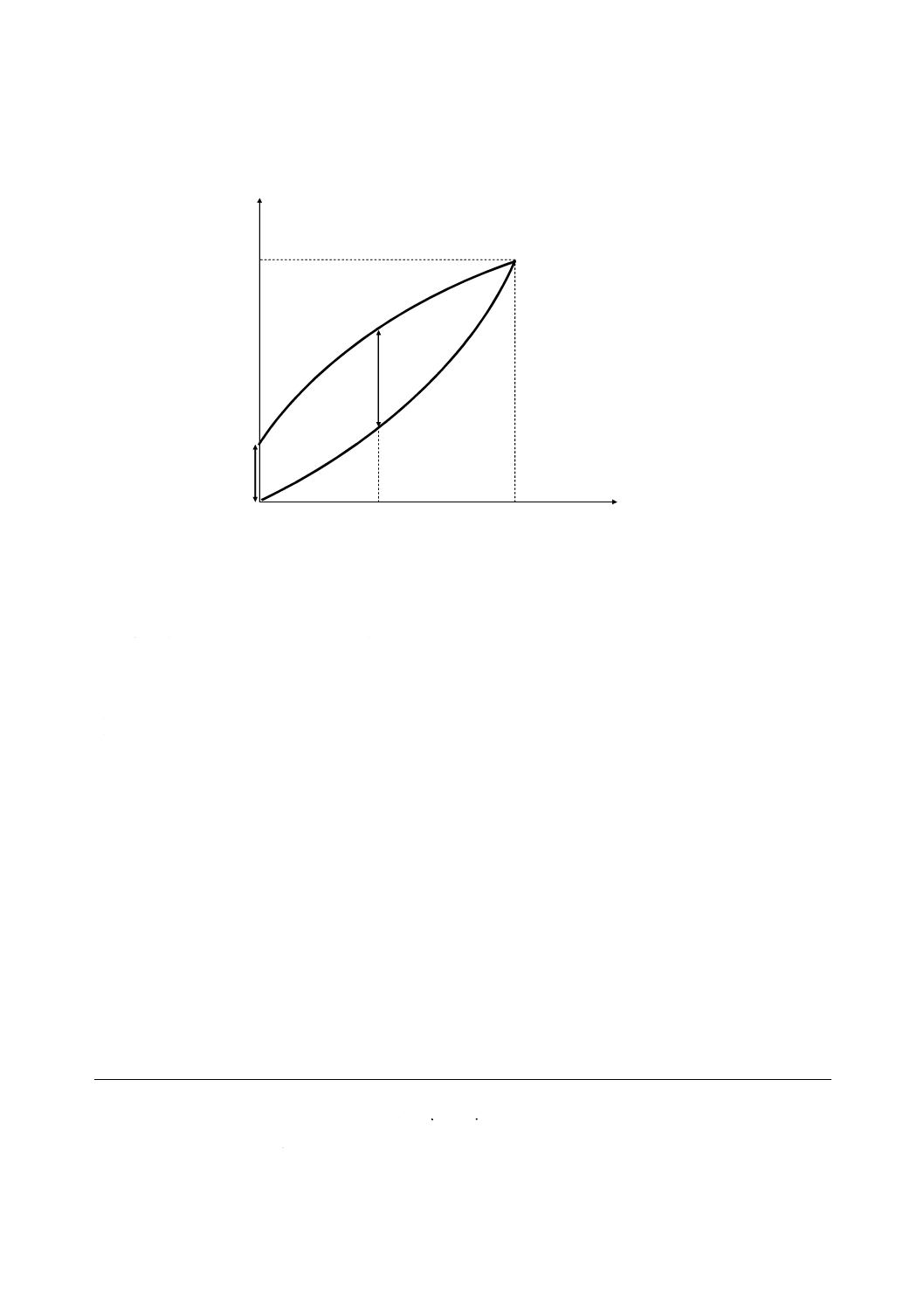
10 測定結果の解析
電界−ひずみ曲線から,図4に示す方法で次に示すパラメータを求める。有効数字は3けたが望ましい。
Smax(無次元),Emax(V/m),dmax(m/V),Eh (V/m),Sh(無次元),Hmax(無次元)及びSr(無次元)。
6
R 1682:2007
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Strain
E-field (MV/m)
Eh
Emax
0
Sr
Sh
Smax
dmax=Smax/Emax
Hmax=Sh/Smax
図4−電界−ひずみ曲線の解析方法
11 測定結果の報告
測定の結果は,次の項目について報告する。
a) この規格の規格番号
b) 測定年月日,測定担当者名及び気温・湿度
c) 試料の種類,材質,形状及び厚さの測定データ
d) 測定装置(測定系の概略及び写真,測定機器リスト,試料ホルダの構造図及び写真並びに試料ホルダ
の設置雰囲気)
e) 測定条件(最大印加電圧,最大印加電界及び繰返し測定の時間間隔)
f)
測定データ(3,4,5回目の電界−ひずみ曲線,f,Smax,Emax,dmax,Eh,Sh,Hmax及びSr)
参考文献 EN 50324-1,Piezoelectric properties of ceramic materials and components−Terms and definitions
EN 50324-2,Piezoelectric properties of ceramic materials and components−Methods of measurement
−Low power
ひずみ量
Smax
dmax= Smax/Emax
Hmax= Sh/Smax
Sh
Sr
Eh
Emax
電界 (MV/m)
0