C 6185-3:2014 (IEC 61746-2:2010)
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 2
3 用語及び定義 ··················································································································· 2
4 校正に向けた準備 ············································································································· 7
4.1 校正実施機関に対する留意事項························································································· 7
4.2 トレーサビリティ ·········································································································· 7
4.3 校正実施の準備 ············································································································· 7
4.4 校正条件に関する留意事項······························································································· 7
4.5 文書として記録する事項 ································································································· 7
5 距離の校正の一般事項 ······································································································· 8
5.1 はじめに ······················································································································ 8
5.2 位置偏差モデル ············································································································· 8
5.3 校正結果の使用 ············································································································· 9
5.4 光ファイバ長の測定 ······································································································ 10
6 距離の校正方法 ··············································································································· 10
6.1 はじめに ····················································································································· 10
6.2 外部光源法 ·················································································································· 11
6.3 連鎖光ファイバ法(マルチモード光ファイバ使用) ····························································· 15
6.4 ループ遅延線法 ············································································································ 19
7 垂直軸の校正の一般事項 ··································································································· 22
7.1 はじめに ····················································································································· 22
7.2 後方散乱損失差分の校正 ································································································ 22
7.3 OTDR光源のニアフィールド分布の明確化 ········································································ 25
8 損失の校正方法 ··············································································································· 25
8.1 はじめに ····················································································································· 25
8.2 長尺ファイバ法 ············································································································ 25
附属書A(規定)距離校正用のマルチモードループ遅延線 ··························································· 28
附属書B(規定)数学的根拠 ································································································· 32
C 6185-3:2014 (IEC 61746-2:2010)
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,一般財団法人光産業技術振興協会(OITDA)
及び一般財団法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出
があり,日本工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。これによって,
JIS C 6185-2:2007は改正され,その一部を分割してJIS C 6185-3として制定された。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS C 6185の規格群には,次に示す部編成がある。
JIS C 6185-2 第2部:校正方法−シングルモード光ファイバ用OTDR
JIS C 6185-3 第3部:校正方法−マルチモード光ファイバ用OTDR
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 6185-3:2014
(IEC 61746-2:2010)
オプティカルタイムドメインリフレクトメータ
(OTDR)−第3部:校正方法−
マルチモード光ファイバ用OTDR
Optical time-domain reflectometers (OTDR)-
Part 3: Calibration of OTDR for multimode fibers
序文
この規格は,2010年に第1版として発行されたIEC 61746-2を基に,技術的内容及び構成を変更するこ
となく作成した日本工業規格である。
なお,この規格で点線の下線を施してある参考事項は,対応国際規格にはない事項である。
この規格を用いて校正するオプティカルタイムドメインリフレクトメータは,少なくとも次の仕様を備
えているものを対象とする。
a) JIS C 6832に規定するSGI-50/125-A1の石英系マルチモード光ファイバを測定できる。
b) 群屈折率又はそれと同等なパラメータが,設定できる。
c) パワーは,対数目盛で表示し,距離は,等分目盛で波形を表示できる。
d) 表示波形上の任意の2点間の損失及び距離を表示する二つのマーカ又はカーソルが設定できる。
e) オプティカルタイムドメインの距離基準点からの絶対距離(位置)が測定できる。
f)
基準レベル(例えば,クリッピングレベル)に対する表示パワーレベルが測定できる。
この規格に規定する校正方法は,JIS C 6185-2に規定するものと同じように見える。しかし,種別の異
なる光ファイバの混用,モードコンディショナの使用,又は光ファイバ配置の違いといった相違があるた
め,異なる構成方法,不確かさの分析が必要となる。
1
適用範囲
この規格は,マルチモード光ファイバ用オプティカルタイムドメインリフレクトメータ(以下,オプテ
ィカルタイムドメインリフレクトメータをOTDRという。)の校正方法について規定する。レーザ光源の
モード条件の試験を任意の測定として含む。
なお,その適用範囲は,OTDRの測定誤差及び測定の不確かさだけとし,OTDR応答の補正に関しては
規定しない。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 61746-2:2010,Calibration of optical time-domain reflectometers (OTDR)−Part 2: OTDR for
multimode fibres(IDT)
なお,対応の程度を表す記号“IDT”は,ISO/IEC Guide 21-1に基づき,“一致している”こ
とを示す。
2
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格のうちで,西暦年を付記してあるものは,記載の年の版を適用し,その後の改正版(追補を含む。)
は適用しない。西暦年の付記がない引用規格は,その最新版(追補を含む。)を適用する。
JIS C 6828 光ファイバ構造パラメータ測定器校正方法
注記 対応国際規格:IEC 61745,End-face image analysis procedure for the calibration of optical fibre
geometry test sets(IDT)
JIS C 6832 石英系マルチモード光ファイバ素線
注記 対応国際規格:IEC 60793-2-10,Optical fibres−Part 2-10: Product specifications−Sectional
specification for category A1 multimode fibres(MOD)
JIS C 6835 石英系シングルモード光ファイバ素線
注記 対応国際規格:IEC 60793-2-50:2008,Optical fibres−Part 2-50: Product specifications−Sectional
specification for class B single-mode fibres(MOD)
JIS Q 17025 試験所及び校正機関の能力に関する一般要求事項
注記 対応国際規格:ISO/IEC 17025,General requirements for the competence of testing and calibration
laboratories(IDT)
ISO/IEC Guide 98-3:2008,Uncertainty of mesurement−Part 3: Guide to the expression of uncertainty in
measurement (GUM:1995)
IEC 61280-1-4,Fibre optic communication subsystem test procedures−Part 1-4: General communication
subsystems−Light source encircled flux measurement method
IEC 61280-4-1,Fibre-optic communication subsystem test procedures−Part 4-1: Installed cable plant−
Multimode attenuation measurement
3
用語及び定義
この規格で用いる主な用語及び定義は,次による。
注記 更に詳細な定義は,IEC 60050-731を参照することが望ましい。
3.1
減衰量,損失,A(attenuation)
デシベル(dB)で表した光パワーの減少。ある光ファイバの一方の端に入った光パワーをPin(W),他
端から出た光パワーをPout(W)とするとき,この光ファイバの減衰量を式(1)で表す(IEC 60050-731のIEV
731-01-48参照)。
=
out
in
10
log
10
P
P
A
(dB) ····························································· (1)
3.2
減衰定数,α(attenuation coefficient)
光ファイバの単位長さ当たりの減衰量(IEC 60050-731のIEV 731-03-42参照)。
3.3
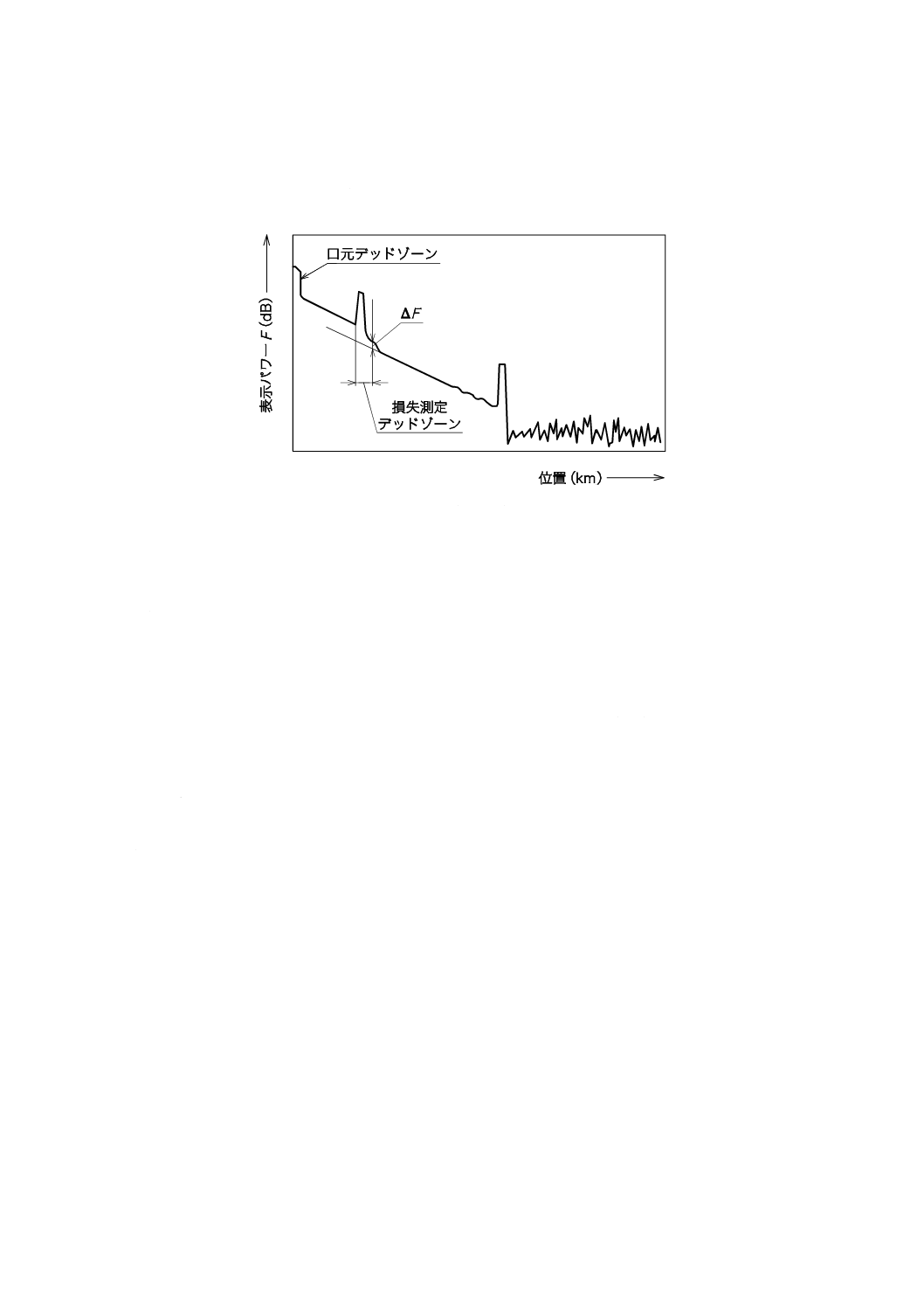
損失測定デッドゾーン(attenuation dead-zone)
反射又は減衰が生じている後方領域に対して表示した波形が,反射又は減衰の影響がない状態の後方散
3
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
乱波形から,規定した垂直距離∆Fを超えてずれている領域。
注記 損失測定デッドゾーンは,反射率,損失,表示パワーレベル,位置などのパラメータによって
異なっている。また,反射又は減衰領域の手前の光ファイバ部品にも依存している。
図1−損失測定デッドゾーンの定義
3.4
校正(calibration)
規定条件の下で,測定装置が示した値とそれに対応するその量の既知の値との関係を明らかにする一連
の作業(ISO/IEC Guide 99参照)。
3.5
中心光波長,λavg(centroidal wavelength)
光源の光パワーで重み付けした真空中での平均光波長(JIS C 61280-1-3参照)。
3.6
表示パワーレベル,F(displayed power level)
OTDRが表示したパワーレベル。
注記1 その他に規定がない場合,Fはクリッピングレベルとの関係から定義している(図8参照)。
注記2 通常,OTDRの目盛は,受信パワーの対数の5倍に定数のオフセットを加えたものである。
3.7
距離,D(distance)
二つの目標の間隔(単位は,通常,m)。
3.8
距離サンプリング誤差,ΔLsample(distance sampling error)
サンプル点が離散的に配置することによって生じる距離(3.7参照)の量子化誤差の最大値(通常,m)。
注記 距離サンプリング誤差は,一般に周期的であるから,この誤差を定量化する一つの方法として,
その振幅を用いることができる。
3.9
距離スケール偏差,ΔSL(distance scale deviation)
距離(3.7)の平均誤差,すなわち,距離の平均指示値〈Dotdr〉とそれに対応する基準距離(3.27参照)
Drefとの差を基準距離で除したもの(例えば,m/m)。ΔSLは,式(2)を用いて算出する。
4
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
1
Δ
ref
otdr
ref
ref
otdr
L
−
=
−
=
D
D
D
D
D
S
〉
〈
〉
〈
······················································· (2)
ここに,
〈Dotdr〉: 一つ以上のサンプル間隔にわたって平均化した,1本の
光ファイバにおける二つの事象間の表示距離。
3.10
距離スケール係数,SL(distance scale factor)
表示された距離(3.7参照)の平均値を,対応する基準距離(3.27参照)で除したもの。SLは,式(3)を
用いて算出する。
ref
otdr
L
D
D
S
〉
〈
=
··············································································· (3)
ここに,
〈Dotdr〉: 一つ以上のサンプル間隔にわたって平均化した,1本の
光ファイバにおける二つの事象間の表示距離(実際の距
離又はシミュレーションによる距離)。
3.11
距離スケールの不確かさ,uΔSL(distance scale uncertainty)
距離スケール偏差(3.9参照)の不確かさ(例えば,m/m)。uΔSLは,式(4)を用いて算出する。
=
−
=
ref
otdr
ref
otdr
SL
Δ
1
D
D
u
D
D
u
u
〉
〈
〉
〈
····················································· (4)
注記 式(4)において,u( ) は,括弧内の標準不確かさを表している。
3.12
98 %ダイナミックレンジ(片道)[dynamic range at 98 %(one-way)]
後方散乱信号レベルと98 %雑音レベル(3.24参照)とが等しくなる光ファイバ減衰量(3.1参照)。石英
系マルチモード光ファイバ(JIS C 6832参照)を用いたときの,後方散乱波形の延長線とパワー軸との切
片と雑音レベル(dB)との差によって表す。
3.13
エンサークルドフラックス,EF(encircled flux)
光ファイバを伝搬する全光パワーに対する,コア中心からある距離以内を伝搬するニアフィールド光パ
ワーの割合を,その距離の関数として表したもの。
3.14
群屈折率,N(group index)
真空中における光速度と光ファイバ内の光パルス伝搬速度との比。
3.15
位置,L(location)
OTDR装置のフロントパネル(入出力コネクタ面)と光ファイバにおけるある目標との間の間隔(通常,
m)。
3.16
位置偏差,ΔL(location deviation)
目標を表示した位置(3.15参照)Lotdrから基準位置(3.28参照)Lrefを引いたもの(通常,m)。
注記 この偏差は位置の関数である。
5
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.17
位置オフセット,ΔL0(location offset)
この規格で用いる位置偏差(3.16参照)モデルにおける定数項の部分。測定器の距離表示におけるOTDR
前面コネクタの位置とほぼ等しい(通常,m)。
注記 完全なOTDRである場合,位置オフセットはゼロである。
3.18
位置オフセットの不確かさ,uΔL0(location offset uncertainty)
位置オフセット(3.17参照)の不確かさ。
3.19
位置読取りの不確かさ,uLreadout(location readout uncertainty)
距離サンプリング誤差(3.8参照)と測定サンプルのタイプAの不確かさとの両方が原因となって起こ
る位置(3.15参照)の測定値の不確かさ。信頼区間の半幅の形で表す(m)。
3.20
損失偏差,ΔA(loss deviation)
光ファイバ部品の損失指示値Aotdrとその基準損失(3.29参照)Arefとの差(dB)。ΔAは式(5)を用いて算
出する。
ref
otdr
Δ
A
A
A
−
=
·········································································· (5)
注記 損失偏差は,通常,表示パワーレベルFに依存している。
3.21
損失の不確かさ,uΔA(loss uncertainty)
損失偏差(3.20参照)の不確かさ(dB)。
3.22
損失スケール偏差,ΔSA(loss scale deviation)
光ファイバ部品の損失指示値Aotdrとその基準損失(3.29参照)Arefとの差を基準損失で除したもの(dB/dB)。
ΔSAは,式(6)を用いて算出する。
ref
ref
otdr
A
Δ
A
A
A
S
−
=
········································································ (6)
注記 詳細は7.1を参照。
3.23
モードコンディショナ(mode conditioner)
入射側での光パワーの空間分布がどのような形であっても,これをエンサークルドフラックスに関する
要求条件に完全に適合する空間分布に変換するように接続した光ファイバの組。
注記 この規格の目的に対するエンサークルドフラックスの要求条件は,IEC 61280-4-1に規定があ
る。
3.24
98 %雑音レベル(noise level at 98 %)
全雑音データ点の98 %以上を含む範囲の上限。
3.25
非線形性,NLloss(non-linearity)
規定パワー領域における,損失偏差ΔAの最大値と最小値との差(dB)。
6
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 非線形性は,損失偏差の一要因であり,通常,表示したパワーレベル及び位置に依存している。
3.26
(受信)パワーレベル,P(power level)
OTDRの光端子によって受信したパワー。
3.27
基準距離,Dref(reference distance)
国際標準又は国家標準に対しトレーサビリティをとって校正した測定装置によって精密に決定した距離
(3.7参照)(通常,m)。
3.28
基準位置,Lref(reference location)
国際標準又は国家標準に対しトレーサビリティをとって校正した測定装置によって精密に決定した位置
(3.15参照)(通常,m)。
3.29
基準損失,Aref(reference loss)
国際標準又は国家標準に対しトレーサビリティをとって校正した測定装置によって精密に決定した光部
品の損失。
3.30
rmsダイナミックレンジ(片道)[rms dynamic range(one-way)]
後方散乱信号レベルとrms雑音レベル(3.31参照)とが等しくなる光ファイバ減衰量(3.1参照)。
注記 雑音分布がガウス分布と仮定すると,rmsダイナミックレンジは片道ダイナミックレンジに1.56
dBを加えた値に等しくなる。rms雑音レベルの項目を参照。
3.31
rms雑音レベル(rms noise level)
雑音の二乗平均レベル。
注記1 一般的には,rms雑音レベルは,OTDRの波形データから読み取ったり抽出したりすること
はできない。これは,光パワーレベルの波形を対数変換してdB単位で表示するときに負の
値を示す雑音信号の部分を取り除いてしまうためである。
注記2 雑音分布が正規分布と仮定する場合,98 %雑音レベルとrms雑音レベルとの関係は式(7)を用
いて算出する。
(
)
dB
56
.1
75
053
.2
log
5
10
rms
98
=
=
−Noise
Noise
···································· (7)
ここに,
Noise98: 雑音レベル(dB)
Noiserms: rms雑音レベル(dB)
2.053 75: 正規分布の98 %に対応する偏差の値
3.32
サンプル間隔(sample spacing)
OTDRによってデジタル化した二つの隣り合うデータ点間の距離(通常,m)。
注記 サンプル間隔は,測定器の設定情報から得ることもある。サンプル間隔は,測定スパン及び
OTDR測定器のその他の設定値に依存することもある。
3.33
光スペクトル幅,ΔλFWHM(spectral width)
7
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
光源スペクトルの半値全幅[FWHM(JIS C 61280-1-3を参照。)]。
4
校正に向けた準備
4.1
校正実施機関に対する留意事項
校正機関は,JIS Q 17025の要求事項を満たすことが望ましい。各校正のステップごとの作業指示及び用
いる装置を文書化した測定手順書をもつことが望ましい。
4.2
トレーサビリティ
トレーサビリティは,JIS Q 17025の要求事項を満たすことが望ましい。
校正手順で用いる全ての標準器は,あらかじめ,国家標準機関又は認定された校正機関によってトレー
サビリティを保証した手順書に従って校正する。校正手順の各々の階層ごとに,それぞれ複数の標準器を
準備することが望ましい。それらの標準器の準備によって,標準器の性能を同一水準での比較によって確
認することができる。
校正結果に少なからず影響を及ぼす試験装置は,全て校正済みであることを確認する必要がある。また,
要求に応じてこれらの試験装置のトレーサビリティの連鎖及び校正の頻度(校正間隔)を規定し文書化し
なければならない。
4.3
校正実施の準備
その他に規定がない場合,全ての校正は,室温23±3 ℃の環境において実施する。校正のための試験装
置は,校正前2時間以上放置し,試験環境に対し平衡状態になるようにする。OTDRは,製造業者の説明
書に指示する時間にわたって暖機運転を行う。
4.4
校正条件に関する留意事項
校正条件には,通常,OTDR外部条件として,日付,温度,光ファイバの種類,コネクタとアダプタと
の組合せ及び入力用光ファイバの使用を含む。
校正は,製造業者の仕様書及び操作手順書に従って実施する。実施する場合,校正を受けるOTDRの実
地運転条件と対応するように,適切な範囲の校正条件及びパラメータを選択する。それらのパラメータは,
製造業者の操作手順書の指示に従い,OTDRの精度及び分解能(例えば,ビューウィンドウ,ズーム機能
など)を最適化するように選択する。
校正条件には,通常,OTDRパラメータとして,平均化時間,パルス幅,サンプル間隔及び中心光波長
を含む。その他の規定がない場合,OTDRの群屈折率は,正確に1.46に設定する。
注記1 校正結果は,校正過程において用いた校正条件に限り有効である。
注記2 危険な放射の可能性があるため,レーザの安全性に関わる条件を必ず設定し維持する(JIS C
6802及びJIS C 6803参照)。
4.5
文書として記録する事項
校正証明書には,次のデータ及び不確かさを記述する。
a) 位置オフセットΔL0及びその不確かさ±2uΔL0並びに距離スケール偏差ΔSL及びその不確かさ±2uΔSL,
又は位置偏差ΔLi及びその不確かさ±2uΔLi
b) 非線形性NLloss
c) 校正時の装置設定(パルス幅,測定スパン,波長,平均化回数など)
d) その他,JIS Q 17025で要求する校正証明書類
8
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5
距離の校正の一般事項
5.1
はじめに
距離校正の目的は,光ファイバ上の異なる点の間の距離について,測定値の真値に対する偏差(誤差)
を求め,これら偏差の不確かさを定式化することである。OTDRは,光パルスが測定対象点に到達し,そ
こから戻るまでの往復時間Tを測定することによって,光ファイバが測定器に接続している点を基準とし
た測定対象点の位置Lを測定する。Lは,真空における光速度c(2.997 924 58×108 m/s)及び光ファイバ
の群屈折率Nを用いてTから式(8)によって算出する。
N
cT
L
2
=
··················································································· (8)
Lの測定誤差は,OTDRのスケール誤差,時間軸のオフセット及び時間軸に対する測定対象点の位置測
定誤差に起因する。位置測定のためのマーカの設置は手動で行ってもよいし,測定器によって自動的に行
ってもよい。一般的に,誤差はマーカ設置方法及び測定対象点の種類(例えば,局在する損失又は受信機
が飽和する大きな反射若しくは受信機が飽和しない小さな反射)の両方に依存する。Lの測定における更
に大きな誤差は,マルチモード光ファイバの群屈折率Nとモード遅延時間差を考慮するときの不確かさに
よって生じる。Nの求め方とモード遅延時間差の結果の分析は,この規格の適用範囲外である。したがっ
て,次の校正手順では,Tを正しく測定するOTDRの能力についてだけ規定する。この規格の目的のため
に,デフォルト値N=1.46を用い,Nの不確かさはゼロとみなす。また,校正方法は,モード遅延時間差
による不確かさの影響を抑制するようなものに限っている。
注記 測定対象となる光ファイバの群屈折率の不確かさが既知の場合,光速度cの有効数字桁数は,
群屈折率の不確かさに対して十分高い精度を保つ範囲で打ち切ってもよい。
5.2
位置偏差モデル
ほとんどのOTDRの動作を表現するモデルを仮定し,位置偏差を次のように定式化する。OTDRのフロ
ントパネルコネクタに対する測定対象点の基準位置をLrefとし,表示した位置をLotdrとする。雑音を除去
するためにOTDRの平均化を用いた表示位置Lotdrは,式(9)のように基準位置Lrefによって決まるものと仮
定する。
)
(
Δ
ref
0
ref
L
otdr
L
f
L
L
S
L
+
+
=
··························································· (9)
ここに,
SL: 距離スケール係数。理想的には1である。
∆L0: 位置オフセット。理想的にはゼロである。
f (Lref): 距離サンプリング誤差。理想的にはゼロである。距離サ
ンプリング誤差は,平均がゼロで,周期は,OTDR上の
サンプル点間の距離間隔に等しい周期関数である。一例
として,信号の増大を示す最初のデータ点にマーカを置
くことによって,大きな反射が起こった位置を測定し,
その反射の位置が僅かずつ遠方に移動している場合,f
(Lref) は,周期的傾斜波形のような形になる。
式(9)は,位置測定の既知の誤差を定式化することを意図したものであるが,更にタイプAの不確かさが
加わることもある。これは,距離の測定値及び精度の両方に影響を及ぼす。この精度は,誤差を表すパラ
メータとともに,次の手順によって決定する。まず,SL及び∆L0は,Lrefの異なる値に対するLotdrを測定し,
その後,最小二乗法によって測定結果に適合する直線を適合する求め,この直線からSL及び∆L0を決定す
る。SL及び∆L0は,それぞれ,傾き及び切片である。同様に,位置偏差関数,すなわち,LotdrとLrefとの差
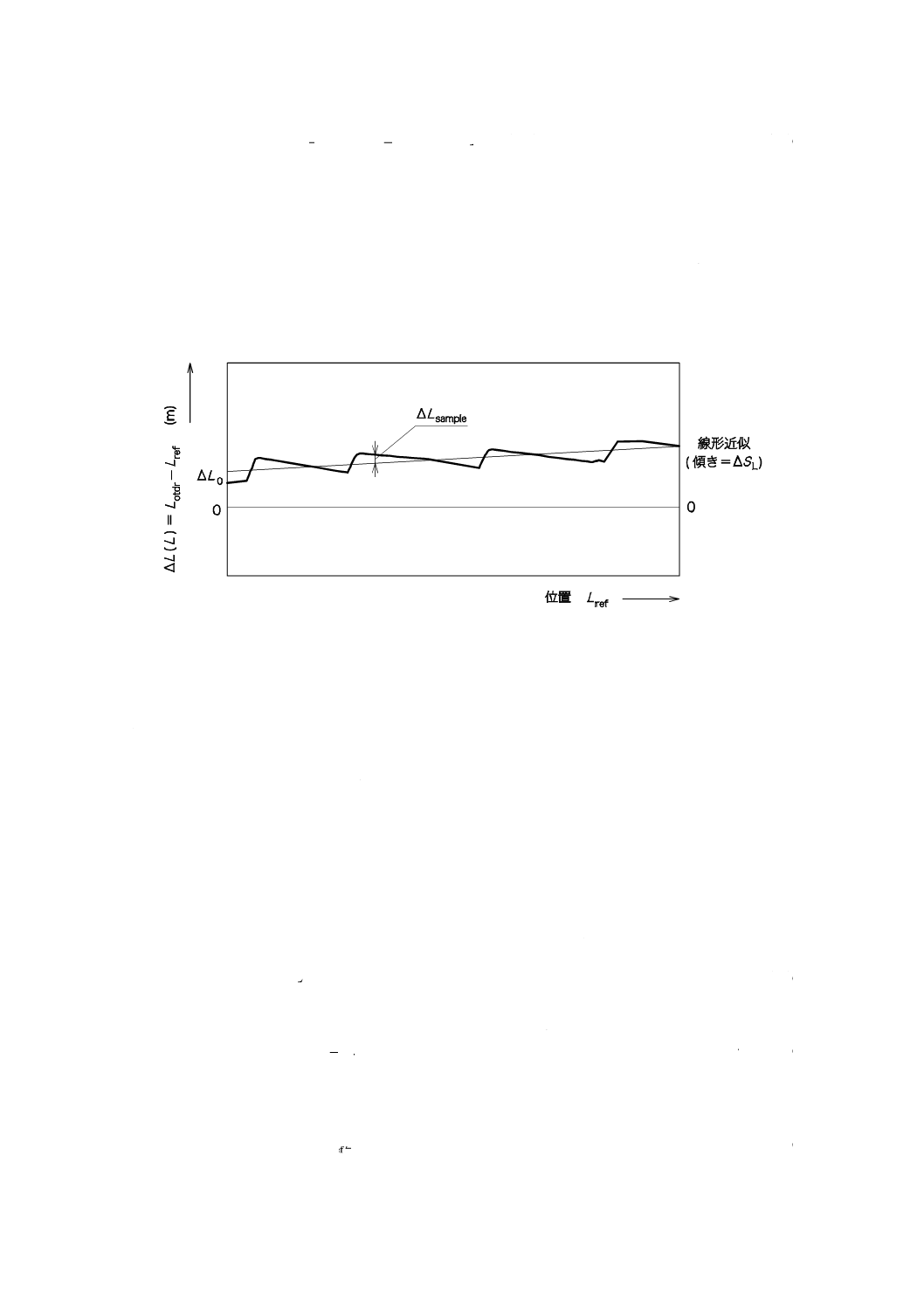
分に適合する直線から,式(10)を用いて,∆SL及び∆L0を算出してもよい。
9
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
)
(
Δ
Δ
Δ
ref
0
ref
L
ref
otdr
L
f
L
L
S
L
L
L
+
+
=
−
=
·········································· (10)
ここに,
∆SL: 傾き
∆L0: 切片(図2参照)
線形近似を求めた後,距離サンプリング誤差f (Lref),具体的には,その半値幅∆Lreadoutは,Lrefの異なる
値に対して,直線からのずれを測定して求めてもよい。距離サンプリング誤差振幅∆Lsampleは,f (Lref) の半
値幅とする。この規格では,距離サンプリング誤差振幅∆Lsampleは,タイプAの位置読取りの不確かさの
一部として取り扱う。したがって,ここに記述した不確かさの結果は,サンプリング誤差の反復性を無視
するものである。すなわち,サンプリング誤差及びタイプAの不確かさの相対的寄与は区別しない。
図2−位置偏差∆L(L) の表現
したがって,距離校正の結果は,次に示すパラメータによって表す。
− ∆SL,u∆SL:
距離スケール偏差及びその不確かさ
− ∆L0,u∆L0:
位置オフセット及びその不確かさ
− uLreadout:
位置読取りの不確かさ,すなわち,距離サンプリング誤差と測定サンプルのタイプA
の不確かさとの組合せによる,標準偏差の形で表す不確かさ
附属書Bの数学的根拠に従って,最小二乗法によって得る最大偏位を3の平方根で除し,uLreadoutを表す。
不確かさは,距離,表示パワーレベル及び測定器の設定によって異なるため注意を要する。
注記 距離サンプリング誤差ΔLsampleは,装置自体のサンプリング誤差を表している。この誤差は,表
示誤差及び距離計算時の誤差を含んだuLreadoutから読み取ることができる。
5.3
校正結果の使用
測定対象点の位置誤差∆L=Lotdr−Lrefは,校正結果を用いて式(11)で算出する。
L
ref
0
Δ
Δ
S
L
L
L
+
=
·······································································(11)
∆Lの不確かさは,式(11a)を用いて算出する。式(11a)では,推奨信頼水準95 %を用いる。
(
)21
2
Lreadout
2
SL
Δ
2
ref
2
0
L
Δ
L
Δ
2
2
u
u
L
u
u
+
+
±
=
±
······································ (11a)
式(11a)において,基準位置Lrefの代わりに表示位置Lotdrを用いてもよく,その場合の影響は無視できる。
同様に,2点間の距離の誤差∆Dは,式(12)を用いて算出する。
L
refΔ
Δ
S
D
D=
·········································································· (12)
10
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
∆Dの不確かさは,式(12a)を用いて算出する。式(12a)では,推奨信頼水準95 %を用いる。
(
)21
2
Lreadout
2
SL
Δ
2
ref
D
Δ
2
2
2
u
u
D
u
+
±
=
±
············································· (12a)
式(12a)において,基準距離Drefの代わりに表示距離Dotdrを用いてもよい。
注記 式(12a)のuLreadout2の前の2は,相関関係がない二つの不確かさを組み合わせるためのものであ
る。
長尺光ファイバの測定の場合,モード遅延時間差の影響による追加の不確かさが発生する可能性がある。
しかし,このような不確かさは,表1に規定する距離においては無視することができる。
表1−追加の距離不確かさ
単位 m
波長
(nm)
距離不確かさを10 cm以上追加する光ファイバの最小限の長さ
JIS C 6832
SGI-50/125-A1
JIS C 6832
SGI-50/125-A2
JIS C 6832
SGI-62.5/125
JIS C 6832
SGI-100/140
850
1 000
7 500
500
50
1 300
1 000
2 500
1 000
500
測定対象点における信号波形のタイプが校正に用いたものと異なる場合,追加の不確かさを考慮に入れ
ることもある。校正結果の一部として測定対象点における信号波形のタイプを明記する。
5.4
光ファイバ長の測定
OTDR距離校正の方法の一つは,既知の長さの光ファイバをOTDRで測定することである。この規格に
おける幾つかの例では,光ファイバ長を,機械的な長さ測定ではなく,光ファイバの伝搬時間を用いて求
める。この方法は,OTDR自体の測定原理と同一である。さらに,伝搬時間は,特に光ファイバが長いと
きに,機械的に長さを測定するよりも高い精度で測定することができる。したがって,この規格では,精
度が重要なときは,光ファイバの長さの代わりに,その伝搬時間を用いることが望ましい。光ファイバの
伝搬時間Ttransitは,例えば,パルス発生器,トリガ可能なレーザ光源,光電変換器(O/E変換器)及びタイ
ムインターバルカウンタを用いて測定する。この場合,レーザ光源は試験OTDRとほぼ同じ中心光波長
λavgをもつことが重要である。波長が異なると,光ファイバの波長分散のために伝搬時間が異なるからで
ある。光パルスを生成するのに,レーザ光源に代わるものは,OTDR自体を用いることである。この場合,
中心光波長は自動的に一致する。レーザ光源とO/E変換器との間に光ファイバを挿入する場合又は挿入し
ない場合の到着時間の相違として,伝搬時間を記録する。この光ファイバをOTDR距離校正に用いるとき,
基準距離Drefは,式(13)を用いて算出する。
N
cT
D
transit
ref=
(m) ·································································· (13)
式(13)では,OTDRの群屈折率設定と同一の群屈折率Nを用いる。時間測定原理によれば,Drefを基準距
離として用いることが可能である。
6
距離の校正方法
6.1
はじめに
ここで説明する選択可能な三つの校正方法は,いずれも必要な校正結果の全て(位置オフセット,距離
スケール偏差及びそれらの不確かさ)を求めることができる。
11
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.2
外部光源法
6.2.1
要点・利点
この方法では,光ファイバ又は校正済みのデジタルディレイ発生器による反射及び散乱の信号を用いて,
光ファイバ内の時間遅延を模擬的に発生させるために光源を用いている。不確かさを減らすために,JIS C
6835に規定する石英系シングルモード光ファイバは(波長1 300 nmで測定する場合),個々の接続のため
に石英系マルチモード光ファイバの代わりに用いることができる。この方法は,コンピュータ制御によっ
て自動化した研究室での試験によく適している。簡略化のため,この規格では,反射の測定対象点につい
てだけ規定する。反射以外の測定対象点についてOTDRを校正するためには,次に規定する光パルスを発
生するE/O変換器を,適切な測定対象点を模擬的に発生する光源に置き換えることが望ましい。
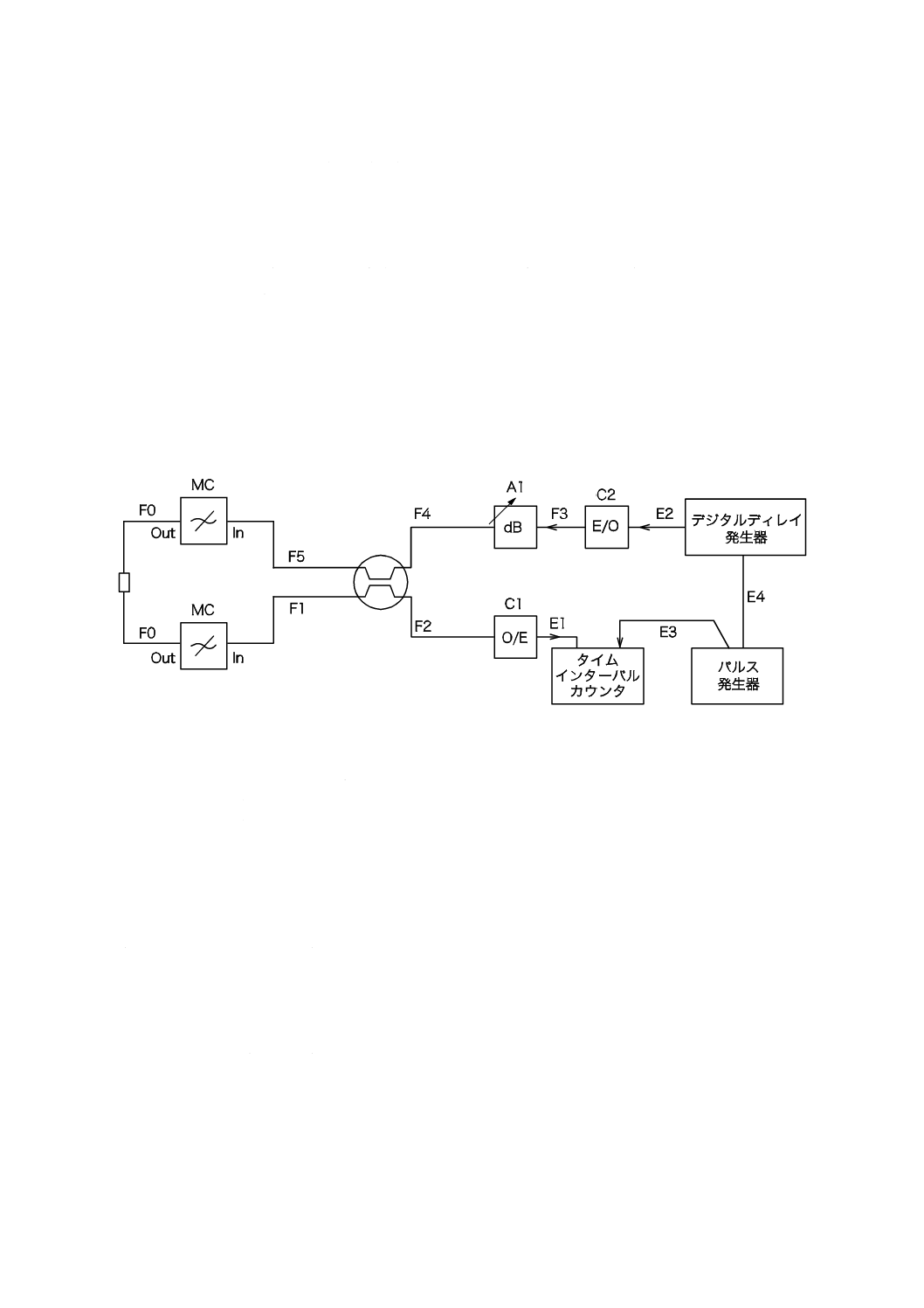
6.2.2
装置
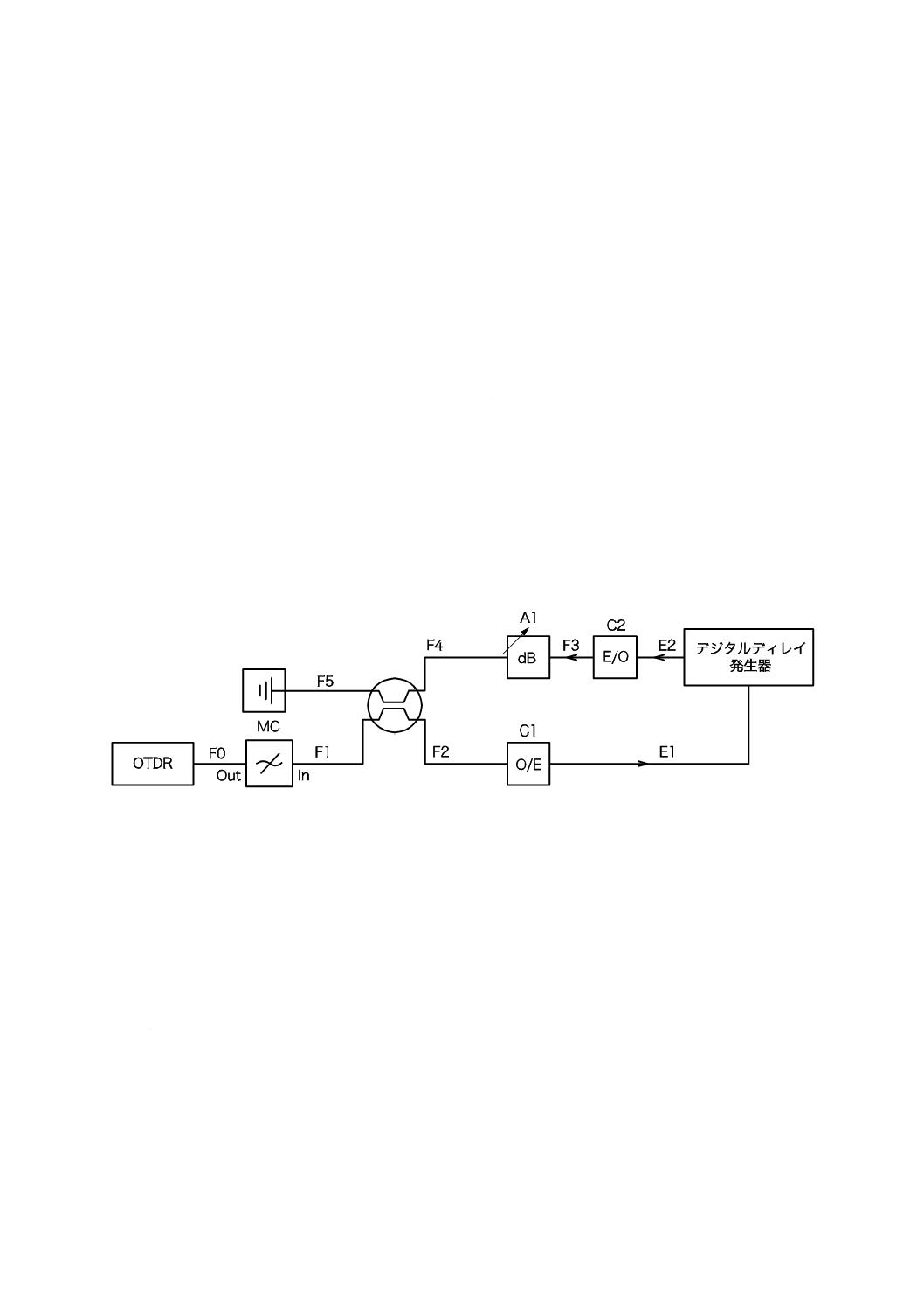
OTDRに加え,測定装置には,図3に示す次のものを含む。
a) モードコンディショナ
b) シングルモード光カプラ
c) O/E変換器
d) パルス機能をもったデジタルディレイ発生器
e) E/O変換器
f)
可変光減衰器(パルス振幅をクリッピングレベル以下まで調整するため)
F0:マルチモード光ファイバ
F1,F2,F3,F4,F5:シングルモード光ファイバ
MC:モードコンディショナ
E1,E2:電気ケーブル
E/O:E/O変換器
O/E:O/E変換器
A1:可変光減衰器
図3−距離スケールの校正用装置:外部光源法
OTDR信号は,マルチモード出力光をシングルモード光に変換するためのモードコンディショナと光カ
プラを介してO/E変換器(光検出器)に導かれる。光検出器の出力信号によって,デジタルディレイ発生
器で設定した時間が経過した後,E/O変換器から光パルスが発生する。このパルスは,光カプラを介して
OTDRに戻す。E/O変換器は,模擬的な反射光を発生するためのものであり,単純なパルスレーザであっ
てもよい。反射の測定対象点に対して距離スケールを校正するには,強度及び時間幅が一定の光パルスが
適切と考えられる。一方,可変光減衰器を用いることで,光ファイバの減衰が引き起こす反射光パルス強
度の低下を模擬的に発生させることが可能となり,パルス強度をOTDRのフロントパネルからの反射の距
12
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
離に従って調整することが可能になる。装置の校正を正確にするためには,光ファイバF1及びF5は,長
さが同じであることが望ましい(6.2.3参照)。
注記1 モードコンディショナは,E/O変換器の光出力をOTDR装置に適切に結合させるためのもの
である。したがって,モードコンディショナの出力側に光ファイバF0を接続し,入力側に
光ファイバF1を接続する必要がある。
注記2 OTDRのコネクタとO/E変換器との間の光路の減衰は,高い場合がある。OTDRの出力が十
分であれば,これは許容できる。
6.2.3
装置の校正
使用前に,“外部光源”装置及びデジタルディレイ発生器は,正しく校正しておく。測定データから位置
オフセット∆L0を算出するためには,機器の挿入遅延Tdelayを求めることも必要である。このことは,図4
に示すように,装置にパルス発生器及び校正済みタイムインターバルカウンタを追加することによって達
成できる。
F0:マルチモード光ファイバ(校正中は2本用いる。)
MC:モードコンディショナ(校正中は2個用いる。)
F1,F2,F3,F4,F5:光ファイバ
E1,E2,E3,E4:電気ケーブル
E/O:E/O変換器
O/E:O/E変換器
A1:可変光減衰器
図4−システム挿入遅延の校正のための構成
モードコンディショナの伝搬遅延を正確に測るために,二つの同じのモードコンディショナを光路の中
に挿入することが望ましい。挿入遅延Tdelayの校正は,次のように行う。
パルス発生器を方形波に設定し,繰返し周期を,測定する遅延時間の2倍よりも長く設定する。パルス
発生器の出力パルスを,タイムインターバルカウンタのスタートパルス及びデジタルディレイ発生器の外
部トリガパルスとして用いる。デジタルディレイ発生器を外部トリガに設定し,ゼロ遅延を,パルス信号
の前縁に合わせる。デジタルディレイ発生器及びカウンタのトリガレベルを設定する。その後,外部光源
が,光方形波を発生し,その方形波は,電気パルスに再変換された後,タイムインターバルカウンタを停
止する。不確かさをできるだけ少なくするために,電気ケーブルE3及びE4は,長さが等しいことが望ま
しい。光ファイバF1及びF5も長さが等しいことが望ましい。それは,図3及び図4において,ケーブル
番号が同一である場合,物理的なケーブルが同一であることを意味している。可変光減衰器は,タイムイ
13
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ンターバルカウンタを最良の状態でトリガがかかるように調整する。表示時間間隔(スタート及びストッ
プ)を挿入遅延Tdelayとして記録する。
6.2.4
測定手順
6.2.4.1
手順
OTDRにおける位置測定の方法(自動又は手動)を選択する。希望のパルス振幅が発生するように,可
変光減衰器を設定する。デジタルディレイ発生器上においてパルス幅を,例えば,1 μsに選択する。デジ
タルディレイ発生器の時間設定値Tiを,広い距離範囲にわたってある程度ランダムに分布させ,OTDRの
距離サンプリング間隔にわたって平均化できるように選択する。最初の時間設定は,パルスがOTDRの光
ファイバ入射端に近く,しかし,口元デッドゾーンの十分外側に現れ,測定が良好にできるように選択す
ることが望ましい。校正機関が別の距離サンプリングの方法を決定し,分析によってそれを正当化できな
い場合,次の二つの方法の一つを選択する。
a) 1番目の方法では,サンプル間隔Dsampleを,例えば,OTDR波形を拡大表示することによって(OTDR
の測定器設定が適切であるかを確認した上で)評価する。その後,式(14)を用いて,デジタルディレ
イ発生器の対応する遅延差Tsampleを算出する。
c
ND
T
sample
sample
2
=
······································································ (14)
ここに,
N: OTDRの群屈折率設定値
c: 真空中における光速度
その後,i個のデジタルディレイ発生器の設定値全部を,n個の設定値からなるk個のクラスタにグ
ループ分けして(i=kn)算出する。このとき,各クラスタは,一様に一つのサンプル間隔を扱い,式
(15)に示す形式をもたなければならない。
()
n
T
n
T
n
T
T
n
T
T
T
/
...,
,
/
2
,
/
,
sample
1
k
sample
k
sample
k
k
−
+
+
+
························· (15)
ここで,各クラスタ内の設定値の個数nは,4以上であり,全てのクラスタについて同一とする。
クラスタの中心間隔は,口元デッドゾーンの直後から測定器の校正範囲を含む大きな距離のところま
で,等間隔になっている。クラスタの個数kは,2という少ない数であってもよい。
b) 2番目の方法では,クラスタはなく,更にサンプル間隔Dsampleは,概略が分かっていればよく,それ
以上のことを知る必要はない。式(14)を用いてTsampleを算出する。時間設定値を,それらが口元デッド
ゾーンと大きな距離との間で等間隔になり,更に各設定値には任意の時間間隔が追加されるように選
択する。任意の間隔は,間隔−T1〜T1において一様な確率密度をもつことが望ましい。ここで,T1は,
20Tsample以上とし,全ての試験について最長遅延の10 %未満とする。測定数i(すなわち,異なる設定
値の個数)は,20以上であることが望ましい。
これらに代わって,タイプAの不確かさの振幅及び測定における許容不確かさについての予備知識によ
って,校正機関が上記のものとは異なる系統的又は無作為の距離サンプリング方法を選択することになっ
てもよい。
6.2.4.2
測定結果の取得
Tiの最初の時間設定値T1を6.2.4.1のように選択する。デジタルディレイ発生器の時間T1及びOTDR上
の測定対象点の測定した位置Lotdr, 1を記録する。時間設定を6.2.4.1で選択したように変更し,測定を実行
する。このとき,時間Ti及び測定した位置Lotdr, iを記録する。この操作を全ての時間設定が終了するまで
続ける。
14
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
6.2.5
計算及び結果
箇条5の考え方によって,時間設定値を用いi個の基準位置Lref, iを,式(16)を用いて算出する。
N
T
T
c
L
i
i
2
)
(
delay
ref,
+
=
··································································· (16)
ここに,
N: OTDRの群屈折率設定値
Ti: 6.2.3で定義した時間設定値
Tdelay: 試験装置の校正済みの挿入遅延(6.2.3参照)
その後,基準位置及び表示位置Lotdr, iを用い,一連のi個の位置偏差∆Liを式(17)を用いて算出する。
i
i
i
L
L
L
ref,
otdr,
Δ
−
=
······································································ (17)
位置オフセット∆L0及び距離スケール偏差∆SLを求めるには,位置偏差データを,簡略化した位置偏差
モデル(このモデルでは,距離サンプリング誤差は一時的に無視する。)に式(18)のように当てはめる。
0
ref,
L
model
,
Δ
Δ
Δ
L
L
S
L
i
i
+
=
····························································· (18)
特に,モデル及びデータ間の差を,最小二乗法を用いてできるだけ小さくする。すなわち,式(19)に示
す和が最小になるように∆SL及び∆L0を選択する。
2
0
ref,
L
)
Δ
Δ
Δ
(
L
L
S
L
i
i
i
−
−
∑
·························································· (19)
近似によって得た∆L0及び∆SLを記録する。
図2に示すように,線形近似の傾きは,距離スケール偏差∆SLを表す。縦軸上の切片は,位置オフセッ
ト∆L0を表す。算出によって得た∆SL及び∆L0を記録する。
6.2.6
不確かさ
6.2.6.1
一般事項
距離の不確かさについての一般的な規定は,箇条5に規定するとおりである。6.2.6.2〜6.2.6.4に規定す
る不確かさの要因が全てを網羅しているとは限らず,測定のシステム構成及び手順によっては,追加の要
因を考慮する。不確かさを算出し,規定する場合,附属書Bの数学的根拠を用いることが望ましい。
6.2.6.2
距離スケールの不確かさ
6.2.5に規定する最小二乗法近似では,測定サンプル間の表示距離を効果的に用いて,距離スケール偏差
を算出する。L=0の近くの測定サンプル及び最も遠い位置L=Lmaxの近くの測定サンプルは,範囲の中央
のサンプルが,距離誤差モデルの傾きに全く影響を及ぼさないために,距離スケール偏差に最も大きな影
響を与える。誤差の広がりについての標準式を式(4)に当てはめると,距離スケールの不確かさuΔSLを式(20)
を用いて算出する。ここでは,〈Dotdr〉≅ Drefを用いている。
2
1
2
ref
Dref
2
otdr
Dotdr
ΔSL
+
〉
〈
≅
〉
〈
D
u
D
u
u
(m/km) ········································ (20)
ここに,
Dotdr: Dref ≈ Lref(ここに規定する長い距離の場合)
u〈Dotdr〉: 距離サンプルの不確かさを表現する標準偏差(位置
サンプルを基に)
u〈Dotdr〉/〈Dotdr〉: 不正確な距離読取りによる傾きの不確かさ。これは,
マーカ設置の不確かさ及び距離サンプリング誤差を
含む式(10)の傾き∆SLの標準偏差と同等である。
u〈Dotdr〉を求めるために,∆SLの算出に用いる最小二
乗法アルゴリズムを用いることができる。可能な場
15
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
合,∆Liは対応するサンプリング間隔にわたって平均
化してもよい。
uDref: 基準距離の不確かさ
uDref/Dref: デジタルディレイ発生器が原因となって起きる傾き
の不確かさであり,デジタルディレイ発生器のタイ
ミングの不確かさに等しい。
6.2.6.3
位置オフセットの不確かさ
位置オフセット∆L0は,最小二乗法近似の縦軸上の切片に等しい。この切片は,ほとんどの場合,最初
の数個のサンプル,すなわち,位置L=0に最も近い数個のサンプルによって決まり,挿入遅延Tdelayの精
度によって異なる。位置オフセットの不確かさuΔL0は,誤差の広がりについての標準式を用いて,式(21)
によって算出することができる。
2
1
2
Tdelay
2
2
ΔL
0
L
Δ
2
+
=
u
N
c
u
u
························································ (21)
ここに,
uΔL: ∆LiとL=0の近くの最小二乗法近似との差の不確かさ。
これは,マーカ設置の不確かさ及び距離サンプリング誤
差を含む。また,L=0の近くにおける (∆Li−∆Li, model)
の標準偏差と等価である。可能な場合,∆Liは対応する
サンプリング間隔にわたって平均化してもよい。uΔLを
算出するために,ΔL0の算出に用いる最小二乗法アルゴ
リズムを用いることができる。
uTdelay: 校正の間,用いる二つのモードコンディショニングアダ
プタの間の差を含むシステム挿入遅延の不確かさ。最初
の時間設定は非常に短いか又はゼロであり,デジタルデ
ィレイ発生器の不確かさは,挿入遅延だけの不確かさに
限定することが前提となる。
6.2.6.4
位置読取りの不確かさ
箇条5で規定したように,位置偏差サンプルΔLiとL=0の近くにおける最小二乗法近似との間の最大差
を求める。その後,その最大差を3の平方根で除すことによって,位置読取りの不確かさuLreadout(これに
は距離サンプリング誤差を含む。)を算出する。この方法に代わって,ΔSL及びΔL0の算出に用いる最小二
乗法アルゴリズムを用いるか,又は式(22)を用いるか,いずれかの方法でuLreadoutを算出してもよい。
(
)
2
1
1
2
model
,
Leadout
Δ
Δ
1
1
−
−
=
∑
=
n
i
i
i
L
L
n
u
·············································· (22)
6.3
連鎖光ファイバ法(マルチモード光ファイバ使用)
6.3.1
要点・利点
この方法では,試験下のOTDRの波長において伝搬時間を精密に測定した校正済みのマルチモード光フ
ァイバを用いて距離スケールの校正を行う。この方法は,種々の長さのコネクタ付き光ファイバを用いる
ため,低価格で,かつ,6.2で規定する装置を用いることができない場所での試験に適している。この方法
は,測定対象点の位置が変化するために短い長さの光ファイバを幾回にもわたって接続替えする必要があ
るため,手動試験方法とみえる場合もあるが,必要に応じて光スイッチを用いることによって,自動化す
ることもできる。
シングルモード光ファイバに代えてマルチモード光ファイバを用いる利点は,850 nm及び1 300 nmの
いずれの波長にも適用できること,並びに測定の際にモードコンディショナが不要なことである。一方,
16
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図5にある光ファイバBのモード遅延時間差を不確かさとして考慮する必要がある。
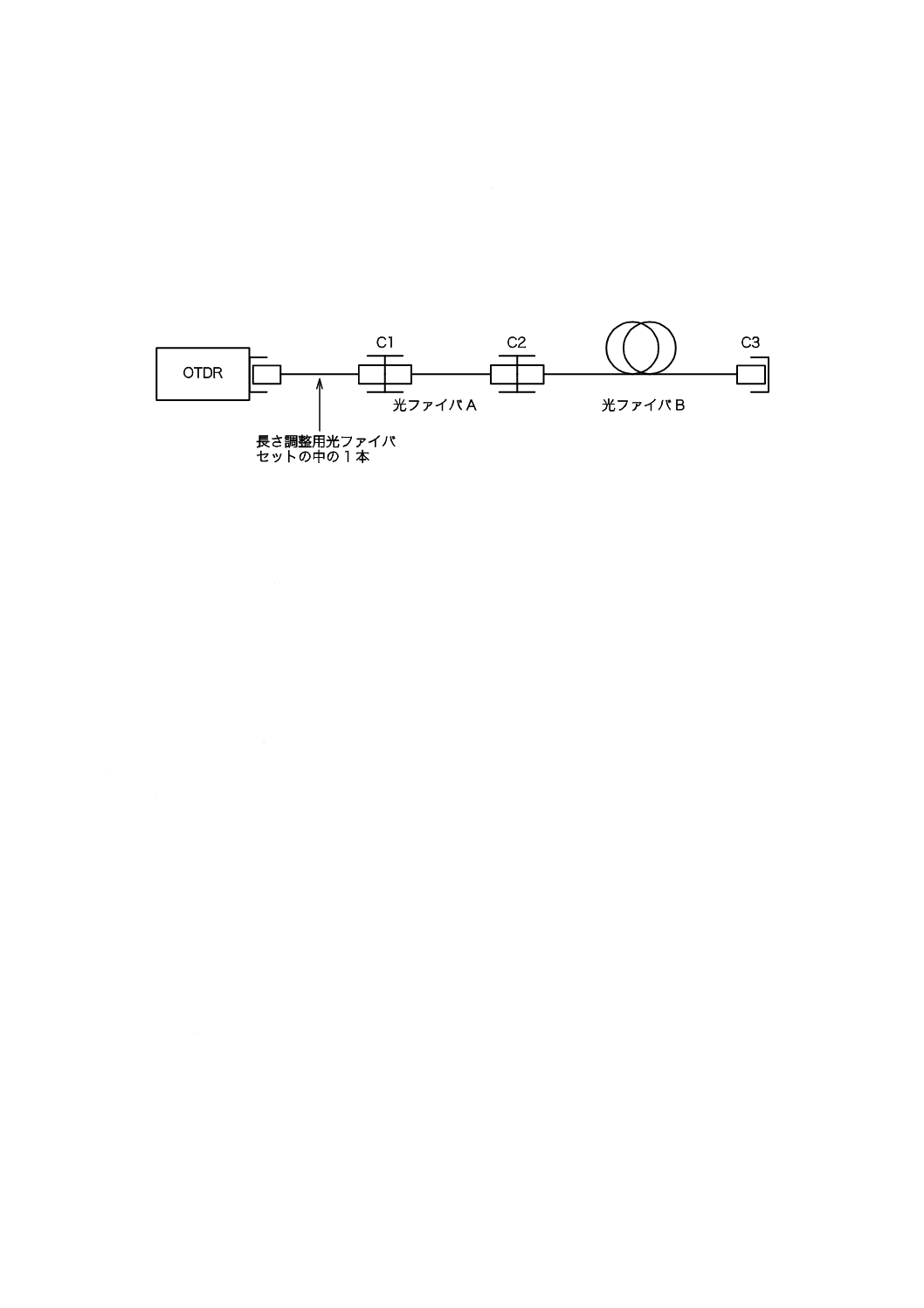
6.3.2
装置
OTDRに加え,測定装置には,図5に示す次のものを含む。
a) 位置オフセットを求めるための光ファイバA
b) 距離スケール偏差を求めるための光ファイバB
c) 距離サンプリング誤差を求めるための長さ調整用光ファイバ1セット
C1,C2,C3:光コネクタ
図5−距離スケールの校正に用いる連鎖光ファイバ
通常,これらの光ファイバは,ケーブル化,ケースへの収納などの方法で保護し,更に接続及び取外し
が容易にできるようにコネクタを装備する。
これらの光ファイバについての要求事項を,次に示す。
a) 光ファイバAは,端面反射をもつ普通のマルチモード光ファイバである。光ファイバの長さは光ファ
イバBに比べてはるかに短い。その長さは,後方散乱波形上で,測定対象となる端面反射がOTDRポ
ートの近くにおいて発生する口元反射によって実質的に乱れることがない場合,それほど重要ではな
い。光ファイバAは,光ファイバBを用いて距離スケール偏差を測定するための入力用光ファイバと
しても用いることができる。
b) 光ファイバBは,例えば,コネクタ端面からの反射を用いるなどの方法によって,反射端をもたなけ
ればならない。この光ファイバを長くすることによって,不確かさを少なくすることができるため,
光ファイバBの長さは,数100 mであることが望ましい。この光ファイバを校正するには,光の伝搬
時間Tbを,箇条5に従って測定する。
注記 正しい距離校正を行うためには,光ファイバの両端(コネクタC2及びC3)からの反射は,
おおむね等しいことが望ましい。例えば,光ファイバの一端がOTDRを飽和させるような反
射を生じ,他端がそのような反射を生じない場合,波形の相違によって距離測定が不正確に
なる。ただし,光ファイバが長い場合,測定した距離スケール偏差に及ぼすこの相違の影響
は小さくなる。
c) サンプリング間隔が正確に分からず,かつ,かなり大きい値と考えられる場合,長い光ファイバBの
二つの反射の位置を,OTDRのサンプリング間隔よりも小さい量だけ変化させるために,長さ調整用
光ファイバのセットを用いる。これらの光ファイバの長さは,サンプリング間隔にわたって,四つ以
上の等間隔の距離が作り出せるように選択することが望ましい。一つの例として,サンプリング間隔
が10 mである場合,長さが2.5 m及び5 mの2本の光ファイバを用いることによって達成できる。こ
れらの光ファイバを個々又は組み合わせて用い,ゼロ[0(いずれも用いない。)],2.5 m,5 m及び7.5
m(両方とも用いる。)の距離増分を作り出すことができる。一般的には,このような光ファイバは,
17
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
式(23)に示す長さ増分を作り出すことが望ましい。
1)
(
...
2
0
X
X
X
D
n
D
D
−
,
,
,
,
·························································· (23)
式(23)において,n≧4であり,更にn DXは試験する条件の下でOTDRのサンプリング間隔に等しい。
例外的な場合を除けば,箇条5に従って行うこれらの光ファイバの伝搬時間の校正は不必要である。
その代わり,これらの光ファイバの長さを物理的に測定することが望ましい。真の群屈折率とOTDR
の群屈折率設定値との差は,このような短い光ファイバについては無視できる。
6.3.3
測定手順
6.3.3.1
一般事項
不規則雑音が位置偏差に及ぼす影響は,表示パワーレベルが,測定器の雑音限界に近づく場合を除き通
常は小さい。不規則雑音が大きい場合は,OTDR平均化回数を多くすることが望ましい。
6.3.3.2
準備
光ファイバAの反射及び光ファイバBの反射端にマーカを設置するための方法(自動又は手動)を選択
する。光ファイバの遠端の反射が,OTDRで見ることができるように光ファイバAをOTDRに接続する。
光ファイバBの両端からの反射がOTDRで見ることができるように,光ファイバBを光ファイバAの遠
端に接続する。
6.3.3.3
測定
OTDRで,光ファイバAの反射位置を測定する。この最初の測定位置をLotdr, 1として記録する。光ファ
イバBによって生成した二つの反射を用いて,OTDRで,光ファイバBの長さを測定する。この最初の測
定距離をDotdr, 1として記録する。
長さ調整用光ファイバの一番短いものをOTDRと光ファイバAの近端との間へ挿入する。位置Lotdr, 2及
び距離Dotdr, 2を測定する。長さ調整用光ファイバを,徐々に長さが増大するように組み合わせて挿入しな
がら,位置Lotdr, i及び距離Dotdr, iを測定する。その操作を,i=n及び長さ調整用光ファイバの長さの合計が
(n−1) DXとなるまで繰り返す。
6.3.4
計算及び結果
6.3.4.1
距離スケール偏差
距離〈Dotdr〉(光ファイバBの長さ)を,Dotdr, iのn個の値の平均として算出する。その後,距離スケー
ル偏差を,式(24)を用いて算出する。
1
1
Δ
b
otdr
ref
otdr
L
−
〉
〈
=
−
〉
〈
=
cT
D
N
D
D
S
····················································· (24)
ここに,
Dref: 基準距離
N: OTDRの群屈折率の設定値
Tb: 箇条5に従って測定した光ファイバBの片道伝搬時間
6.3.4.2
位置オフセット
Lotdr, iのn個の値の平均を〈Lotdr〉とする。式(25)から変換した式(26)を用いて位置オフセットを算出する。
(
)
〉
〈
+
−
〉
〈
=
ref
L
otdr
0
Δ
1
Δ
L
S
L
L
························································ (25)
(
)
(
)
−
+
+
−
〉
〈
=
2
1
Δ
1
Δ
X
a
L
otdr
0
D
n
N
cT
S
L
L
······································· (26)
ここに,
〈Lref〉: 最初の反射に対応する平均基準位置。長さ調整用光ファ
イバの平均長さを用いて算出する。
N: OTDRの群屈折率の設定値
18
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Ta: 箇条5に従って測定した光ファイバAの片道伝搬時間
∆SL: 式(10)を用いて求めた距離スケール偏差。光ファイバA
が十分に短い場合,∆SLの項は無視できる。
6.3.5
不確かさ
6.3.5.1
一般事項
距離の不確かさについての一般的な規定は,箇条5に示すとおりである。次の不確かさ要因が全てを網
羅しているとは限らず,測定のシステム構成及び手順によっては,追加の不確かさ要因を考慮しなければ
ならない。不確かさを計算し,記述する場合,附属書Bの数学的根拠を用いることが望ましい。
6.3.5.2
距離スケールの不確かさ
距離スケールの不確かさuΔSLは,式(10)から導き出した式(27)を用いて算出することが望ましい。
2
1
2
b
b
T
2
otdr
otdr
D
L
S
Δ
+
=
T
u
D
u
u
(m/km) ··········································· (27)
ここに,
uDotdr: 光ファイバBの表示長さの不確かさ。例えば,マーカ設
置の不確かさ及び距離サンプリング誤差が原因となっ
て起こる。
uTb: 光ファイバBの伝搬時間の不確かさ。
ここで,uTbは,次の要因の二乗和平方根を求める方法によって算出することが望ましい。
uTb, counter: タイムインターバルカウンタに起因する光ファイバBの伝搬時間の不
確かさ
uTb, λ: 伝搬時間を求めるときに用いた波長とOTDRの波長との間の差異に
起因する光ファイバBの伝搬時間の不確かさ
uTb, θ: 温度係数に起因する光ファイバBの伝搬時間の不確かさ。代表的な値
は1 cm/(km℃)。
uTb, DMD: モード遅延時間差に起因する光ファイバBの伝搬時間の不確かさ。表
1は,光ファイバの種別ごとの不確かさの違いを示している。
6.3.5.3
位置オフセットの不確かさ
位置オフセットの不確かさuΔL0は,式(26)から∆SL及び (n−1) DX/2を無視して導かれる式(28)を用いて
算出することが望ましい。
2
1
2
a
T
2
2
otdr
L
0
L
Δ
+
=
u
N
c
u
u
·························································· (28)
ここに,
uLotdr: 光ファイバAの端面反射位置測定の不確かさ,すなわ
ち,主としてマーカ位置の不確かさ。距離サンプリング
誤差は,一つのサンプリング間隔にわたって平均化する
ことによって効果的に除去されるものと仮定する。
uTa: 光ファイバAの伝搬時間の不確かさ。
ここで,uTaは,次の要因の二乗和平方根値を求める方法によって算出することが望ましい。
uTa, counter: タイムインターバルカウンタに起因する光ファイバAの伝搬時間の
不確かさ
uTa, λ: 伝搬時間を求めるときに用いた波長とOTDRの波長との間の差異に
起因する光ファイバAの伝搬時間の不確かさ
uTa, θ: 温度係数に起因する光ファイバAの伝搬時間の不確かさ。代表的な値
は1 cm/(km℃)。
uTa, DMD: モード遅延時間差に起因する光ファイバAの伝搬時間の不確かさ。
(異なる種別の光ファイバ長さの比から推定可能である。また,光フ
19
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ァイバAが光ファイバBに比べて十分に短い場合,この不確かさを無
視できる。)
6.3.5.4
位置読取りの不確かさ
6.3.3で得た測定サンプルを用いて,次に示す二組のデータ,つまり,一組の位置偏差は,式(29)用いて,
もう一組の距離誤差のデータは,式(30)を用いて算出する。
+
−
=
−
X
a
otdr,
ref,
otdr,
iD
N
cT
L
L
L
i
i
i
i=0〜n−1·································· (29)
N
cT
D
D
D
i
i
i
b
otdr,
ref,
otdr,
−
=
−
i=0〜n−1 ·········································· (30)
位置読取りの不確かさuLreadoutを算出するためには,“L”セット又は“D”セットのいずれか大きい方の
セットの最大値及び最小値の差の半分を3の平方根で除すことが望ましい。
6.4
ループ遅延線法
6.4.1
要点・利点
ループ遅延線法は,周期的な反射を得るために,光カプラ及び反射部で構成した校正済みのマルチモー
ド光ファイバループを用いる方法である。この方法は,連鎖光ファイバ法と類似している。つまり,光フ
ァイバ部品を用いて,電子装置を必要としない。この部品によって,連続する校正済みの距離基準が得ら
れる。これによって,距離スケール偏差に影響を及ぼすタイプAの不確かさを小さくできる可能性がある。
位置オフセットの測定は,ループ遅延線によって作り出した反射点から発生する光信号波形の形状によっ
て制限をする。
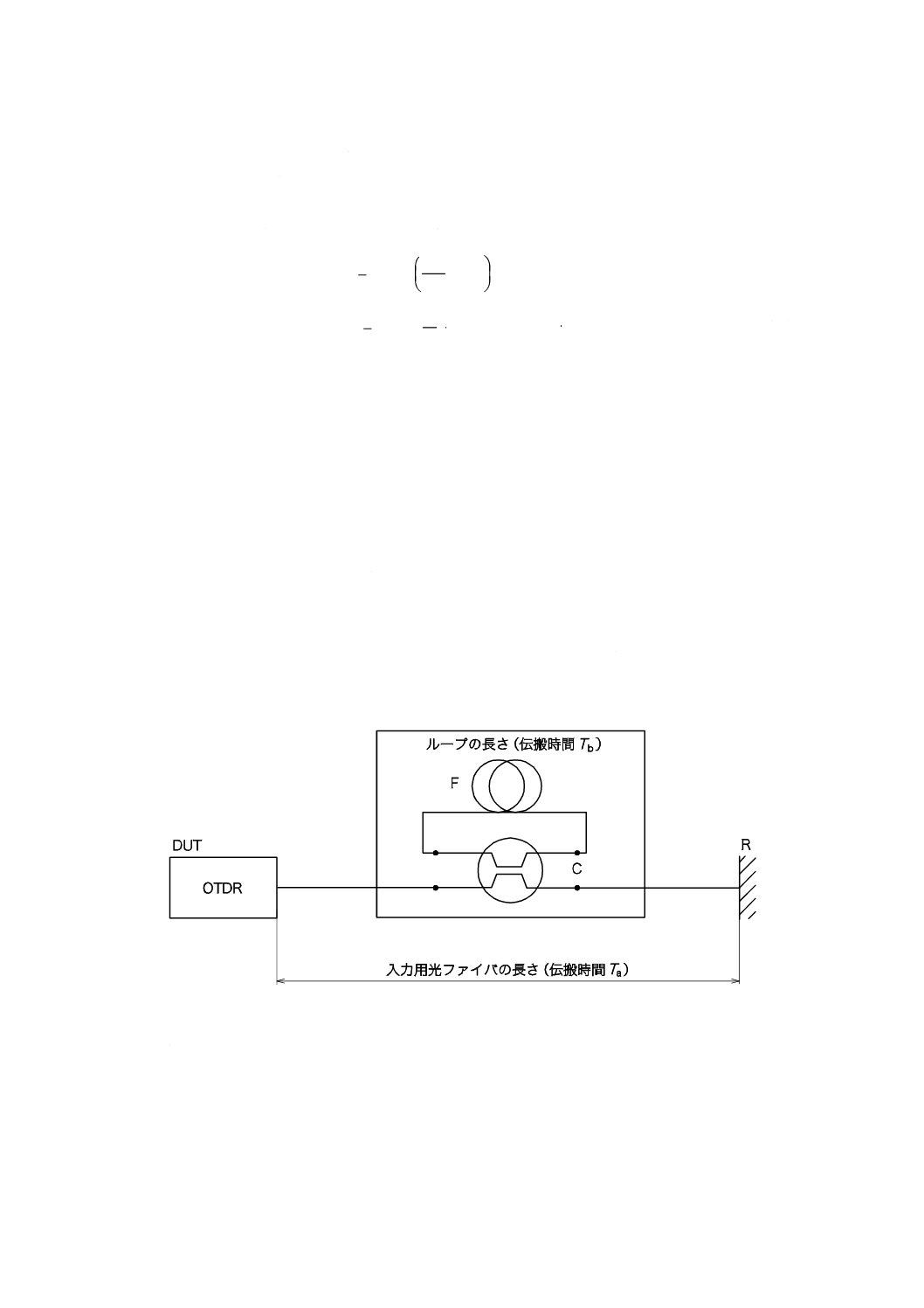
6.4.2
装置
OTDR以外で必要な測定装置は,図6に示すように,附属書Aに従って製造した校正済みのマルチモー
ド光ファイバループ遅延線だけである。
F:ループ内の光ファイバ
C:4端子光カプラ
R:反射部
図6−ループ遅延線による距離校正
ループ遅延線は,図7に示すようにOTDRディスプレイ上に数多くの反射点を表示する。最初の反射点
は,反射部まで直接伝搬し,その後OTDRに直接戻る光パルスから得る。2番目の反射点は,一度ループ
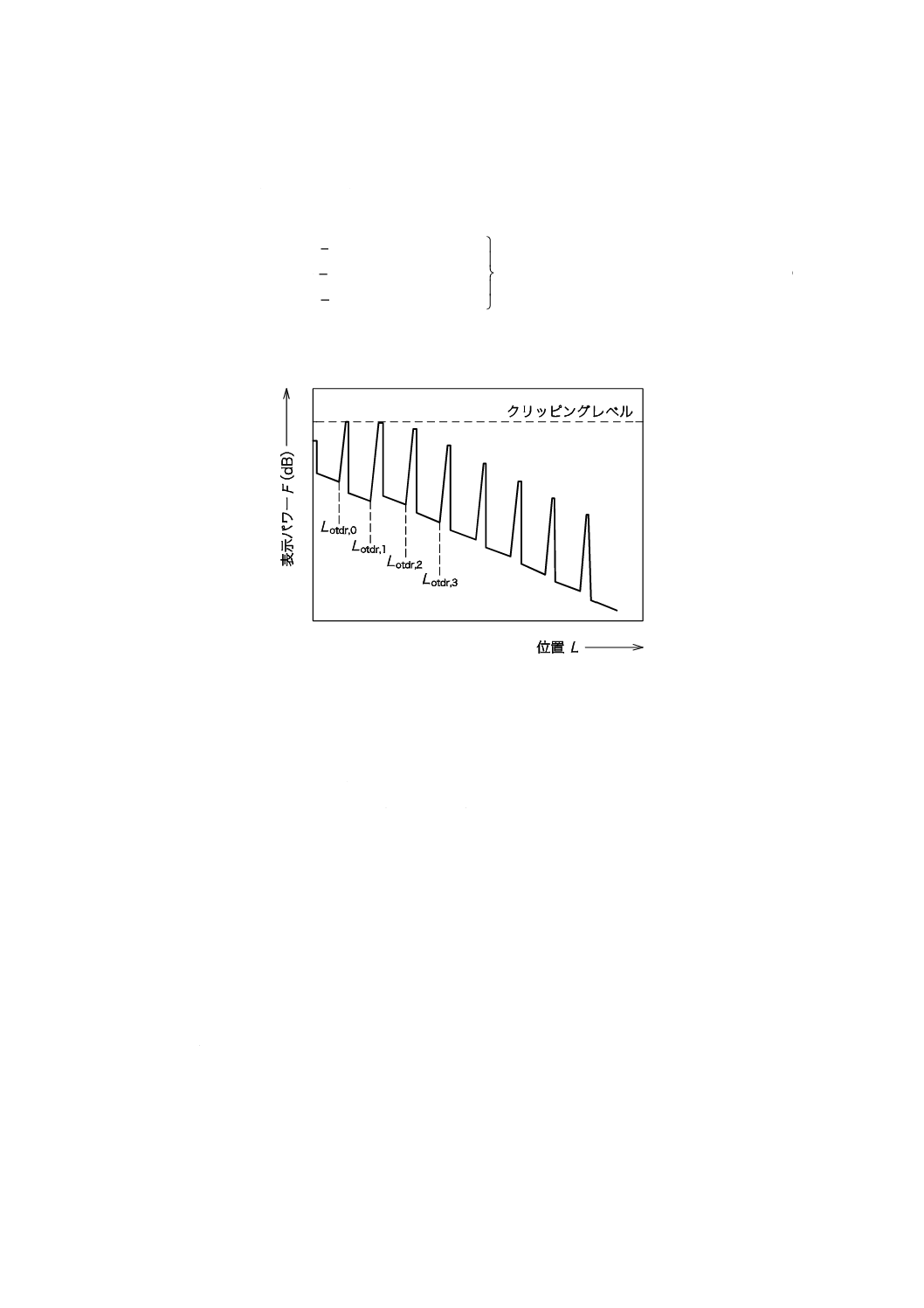
20
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
を通ってから反射部に伝搬し,その後OTDRに直接戻る光パルスによって生成する(このパルスは,直接
反射部まで伝搬し,その後ループを通ってOTDRに戻るパルスと同時に戻る。)。3番目のパルスは,ルー
プを2回通過する。以降,同様に反射点を生成する。
したがって,理想的な表示位置は式(31)のようになる。
+
=
+
=
=
など
b
a
2
otdr,
b
a
1
otdr,
a
0
otdr,
2/
L
L
L
L
L
L
L
L
·················································· (31)
ここに,
La: 入力用光ファイバの長さ
Lb: 光ファイバループの長さ
図7−ループ遅延線によって発生するOTDR波形
測定システム構成に,6.3.3に規定するように1本以上の長さ調整用光ファイバを用いてもよい。遅延線
からの多重反射は,距離サンプリング間隔にわたり平均的に発生するので,増加分光ファイバは少なくし
てもよい。また,この平均化効果を管理していないため,系統的な処理を行った方がよい。6.3.3の表記を
用い,n=2とすれば十分である。その場合,長さ調整用光ファイバは,その長さが距離サンプリング間隔
の半分に等しいものを1本だけ用いればよい。
6.4.3
測定手順
6.4.3.1
一般事項
ここで規定する手順では,長さ調整用光ファイバは用いないことを想定している。長さ調整用光ファイ
バを用いる場合は,記録する距離サンプルの数を単純に増やせばよく,表記及び計算は,それに合わせて
単純に修正することが望ましい。そのとき,この方法は,入力用光ファイバが光ファイバAに等しく,ル
ープの長さが光ファイバBに等しい場合の,6.3に規定する方法と非常に類似したものになる。
6.4.3.2
準備
ループ遅延線からの各反射点の各前縁に製造業者が指示する方法に従ってマーカを設置(自動又は手動)
できるように準備しておく。ループ遅延線をOTDRに直接接続し,反射点がOTDR上で観測できるように
する。
6.4.3.3
測定結果
ループ遅延線からの連続的な反射の位置を,OTDRを用いて測定する。これらの測定結果をLotdr, iとして
21
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
記録する。ここで,添え字iは0〜kまで変化し,ループの通過回数を表す。kが大きな数の場合,おそら
く結果の精度が増すことになるが,この数は,損失及びOTDRのノイズフロアで制限を受ける。
6.4.4
計算及び結果
ループ遅延線の校正データTa及びTbを用いて,一連の基準位置を,式(32)で表す。
(
)
(
)
+
=
+
=
など
=
=
:2
2/
:1
b
a
2
ref,
b
a
1
ref,
N
T
T
c
L
i
N
T
T
c
L
i
·················································· (32)
ここに,
N: OTDRの群屈折率の設定値
次に,表示位置Lotdr, i及び基準位置を用い,一連の位置誤差∆Liを式(33)を用いて算出する。
(
)
i
i
i
i
i
L
f
L
L
S
L
L
L
ref,
0
ref,
L
ref,
otdr,
Δ
Δ
Δ
Δ
+
+
=
−
=
···································· (33)
位置オフセット∆L0及び距離スケール偏差∆SLを求めるために,位置偏差データを単純化された位置偏
差モデル(ここでは,位置読取りの不確かさは一時的に無視する。)に式(34)のように当てはめる。
0
ref,
L
model
,
Δ
Δ
Δ
L
L
S
L
i
i
+
=
····························································· (34)
ここで注意することは,モデルとデータとの間の差を,最小二乗法を用いてできるだけ小さくすること
である。すなわち,式(35)で示す和が最小になるように∆SL及び∆L0を選択する。
(
)
∑
−
−
i
i
i
L
L
S
L
2
0
ref,
L
Δ
Δ
Δ
··························································· (35)
近似によって得た∆L0及び∆SLを記録する。
6.4.5
不確かさ
6.4.5.1
一般事項
距離の不確かさについての一般的な規定は,箇条5に規定するとおりである。6.4.5.2〜6.4.5.4に規定す
る不確かさの要因が全てを網羅しているとは限らず,測定のシステム構成及び手順によっては,追加の不
確かさ要因を考慮する。不確かさを計算し,規定する場合,附属書Bの数学的根拠を用いることが望まし
い。
6.4.5.2
距離スケールの不確かさ
6.4.4で規定した最小二乗法近似では,測定サンプル間の表示距離を有効に用いて,距離スケール偏差を
算出する。L=0の近くの測定サンプルのグループ及び最も遠い位置L=Lmaxの近くの測定サンプルのグル
ープは,距離スケール偏差に最も大きな影響を及ぼすものと考えられる。これは,範囲の中央のサンプル
は距離誤差モデルの傾きに全く影響を及ぼさないからである。誤差の広がりについての標準式を式(4)に当
てはめると,距離スケールの不確かさuΔSLを式(36)を用いて算出できる。ここでは,〈Dotdr〉≅ Drefを用いる。
2
1
2
ref
ref
D
2
otdr
otdr
D
ΔSL
+
〉
〈
≅
〉
〈
D
u
D
u
u
(m/km) ········································ (36)
ここに,
〈Dotdr〉: Dref ≈ Lref(ここに規定する長い距離の場合)
u〈Dotdr〉: 距離サンプルの不確かさを表現する標準偏差(距離サン
プルを基に)。これは式(10)の傾き∆SLの標準偏差に等し
い。これには,マーカ設置の不確かさ及び距離サンプリ
ング誤差を含む。u〈Dotdr〉を求めるために,∆SLを求める
ときに用いる最小二乗法アルゴリズムを用いることが
できる。長さ調整用光ファイバを用いる場合は,∆Liを
22
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
対応するサンプリング間隔にわたって平均化してもよ
い。
uDref: 基準距離の不確かさ。これは,式uDref/Dref=uTb/Tbによっ
て算出することができる。この式において,uTbはループ
遅延線の校正証明書に明記するループ伝搬時間の不確
かさである(附属書A参照)。
6.4.5.3
位置オフセットの不確かさ
位置オフセット∆L0は,最小二乗法近似の縦軸上の切片に等しい。この切片はほとんどの場合,最初の
数個のサンプル,すなわち,位置L=0に最も近い数個のサンプル及び伝搬時間Taの精度に依存する。位
置オフセットの不確かさu∆L0は,誤差の伝搬についての標準式を式(34)に当てはめることによって式(37)
のように算出することができる。
2
1
2
a
T
2
2
ΔL
0
ΔL
+
=
u
N
c
u
u
····························································· (37)
ここに,
uΔL: ∆LiとL=0の近くの最小二乗法近似との差の不確かさで
あり,これには,マーカ設置の不確かさ及び距離サンプ
リング誤差を含む。これは,L=0の近くにおける
(∆Li−∆Li, model)の標準偏差と等価である。u∆Lを求めるため
に,∆L0の算出に用いる最小二乗法アルゴリズムを用い
ることができる。長さ調整用光ファイバを用いる場合
は,∆Liは対応するサンプリング間隔にわたって平均化
してもよい。
uTa: ループ遅延線の入力用光ファイバの遅延時間の文書化
された不確かさ(附属書A参照)。
uTa, θ: 温度係数に起因する,ループ遅延線の入力用光ファイバ
の遅延時間の不確かさ。代表的な値は1 cm/(km℃)。
6.4.5.4
位置読取りの不確かさ
位置読取りの不確かさの求め方の原理を,図2に示す。ループ遅延線を用いると,測定サンプルの反復
性を示す十分なデータが得られない可能性もあるが,そのような場合でも位置誤差∆Li (Lref) とその最小二
乗法による近似値との間の最大差を求め,その後,その差を3の平方根で除すことによって,位置読取り
の不確かさuLreadout(これには距離サンプリング誤差を含む。)を得る。
7
垂直軸の校正の一般事項
7.1
はじめに
マルチモード光ファイバ用OTDRの垂直軸の校正のプロセスは次の二つの部分に分けられる。
一つ目の部分は主にOTDRの受光部に関係し,損失差分校正という。校正プロセスのこの部分は,OTDR
の能力が,光ファイバから受光する後方散乱光パワーを正しく測定するものとみなしている。
校正プロセスの二つ目の部分は,OTDRのレーザ光源によって作り出す出射光の状態の測定である。そ
の目的は,OTDR光源のニアフィールド分布を明確化し,適切な後方散乱信号が発生していることを示す
ことである。
OTDR光源の状態の明確化は,そのニアフィールド分布の分析によって実現できる(IEC 61280-1-4参照)。
後方散乱光パワーの校正及びニアフィールド分析の原理の概略を,7.2及び7.3に示す。
7.2
後方散乱損失差分の校正
7.2.1
表示パワーレベルFの求め方
23
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
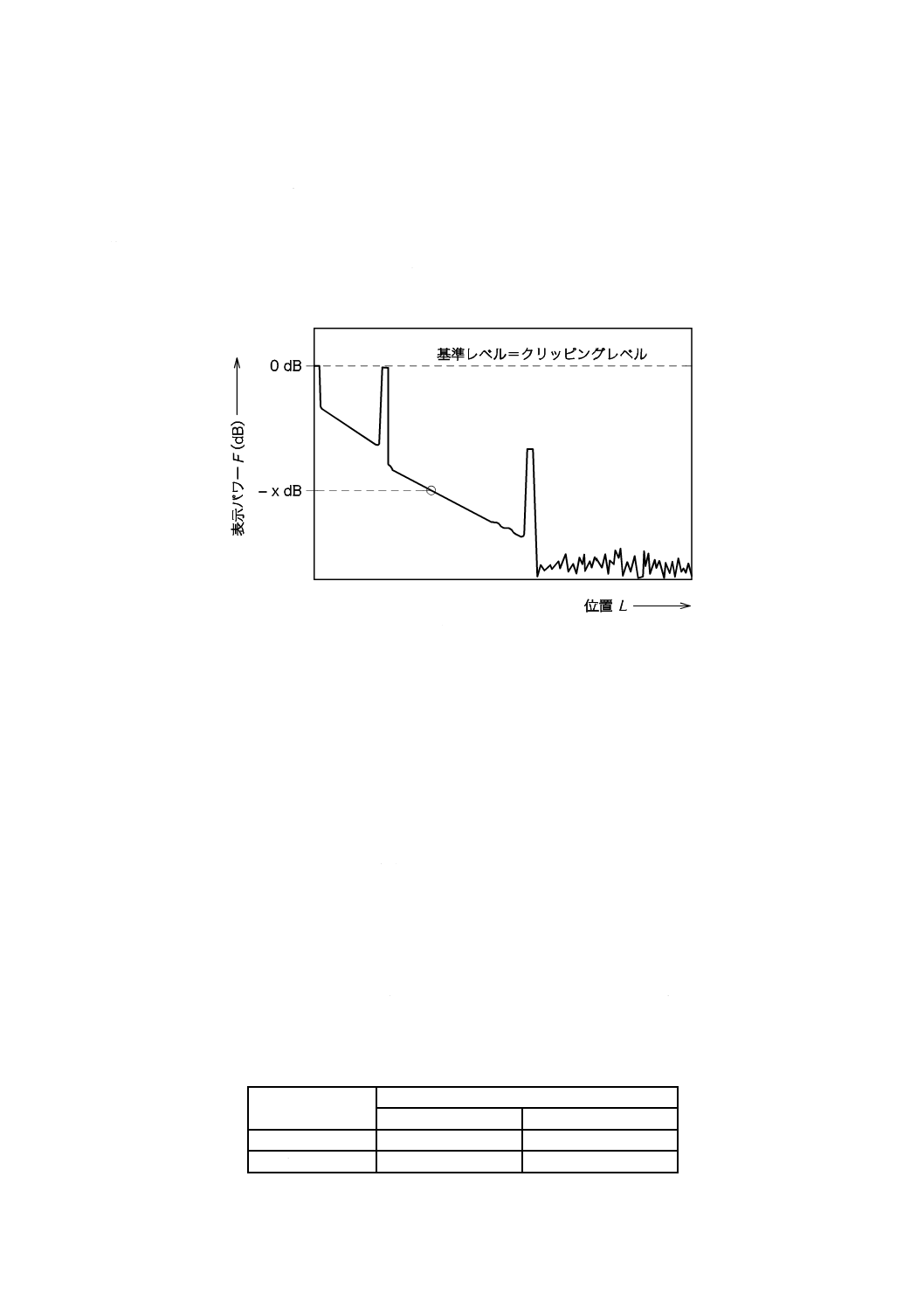
測定された各損失について,表示パワーレベル又はそれと等価のパラメータを求める。そのパラメータ
は,測定サンプルの垂直位置を再現できるものである。このレベルを記号Fで表す。その他に規定がない
場合,Fを求めるための(デフォルトの)基準点としてOTDR装置のフロントパネルのコネクタ位置にお
けるクリッピングレベルを用い,その点をFref=0 dBとする。Fの値は,この基準点の相対値で規定する
(例 表示パワーレベルがクリッピングレベルよりx dB低い場合,F=−x dBとなる。)。クリッピングレ
ベルは,図8に示すように,十分に大きい反射を1本の光ファイバ内に発生させることによって見つける
ことができる。
図8−基準レベル及び表示パワーレベルの求め方
別な方法としては,OTDRが表示パワーをdB単位で読み出す機能を備えている場合,Fの値を,固定値
に対して相対的なdB単位で表してもよい。また,指定したタイプの光ファイバに指定した幅のパルス光
を入射したときの後方散乱光波形の先頭レベルを,基準レベルとして用いてもよい。後者の場合,基準レ
ベルの再現性は,通常OTDRへの接続再現性に影響を受けることから,注意が必要である。
7.2.2
試験計画の立て方
損失サンプルは,パワーレベルばかりでなく,距離及び測定点の手前側の信号履歴(すなわち,光ファ
イバのOTDR表示の形)に依存することもある。特に,検出器及び電子回路は,レーザ光の最初の照射又
は光ファイバ内における散乱若しくは反射信号からの回復によって影響を受けることもある。校正は,そ
れを行う対象である距離及び信号状態にだけ適用する。
この規格では,信号履歴の特定の条件は要求しない。パワーレベル及び距離を規定するときの助けとし
て,この規格ではOTDRの表示領域Aを,ユーザが通常測定を行う領域の近似領域として定義する。この
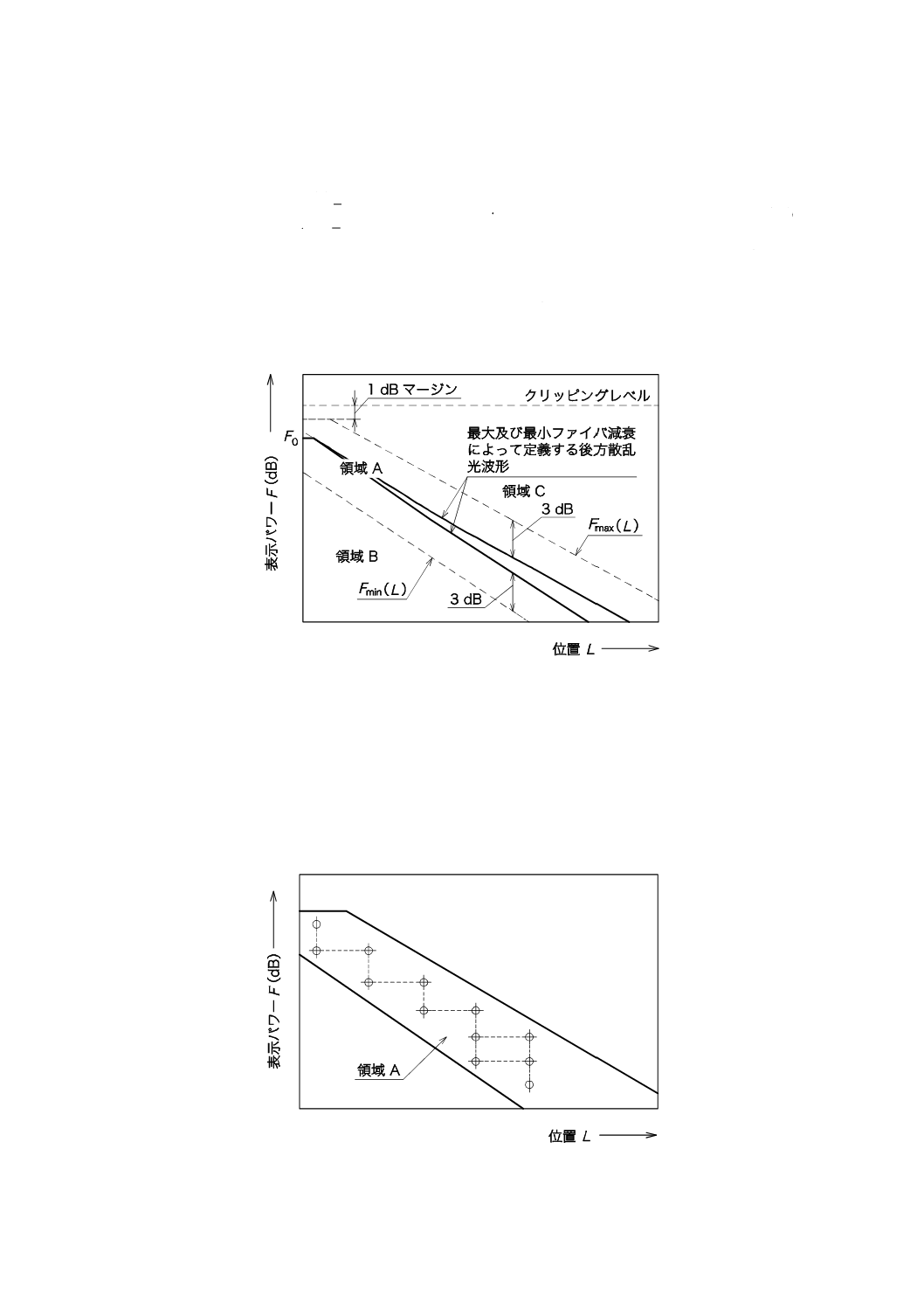
規格の目的のために,領域Aは,図9に示すような四つの量によって定義する。四つの量とは,用いる特
定パルス幅に対する後方散乱光波形の外挿始点F0,表2に規定する最小及び最大減衰並びに両側における
3 dBのマージンである。
表2−領域Aを定義する減衰定数
波長
光ファイバ減衰定数
最小(αmin)
最大(αmax)
850 nm
1.5 dB/km
3.5 dB/km
1 300 nm
0.3 dB/km
1.5 dB/km
24
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
同様に,代表的なシングルモード光ファイバを表すのに,その他の波長に対する減衰定数の値を選択し
てもよい。領域Aの解析的記述を式(38)に示す。
()
()
dB)
(
3
dB)
(
3
max
0
min
min
0
max
−
−
=
+
−
=
L
F
L
F
L
F
L
F
α
α
···················································· (38)
OTDRの製造業者によるその他の指定がない場合,Fmaxは,クリッピングレベルよりも1 dB低いレベル
を超えないことが望ましい。損失の校正点Fは,領域Aの内部にあることが望ましい。領域B及び領域C
における校正データを記載してもよい。領域Bは,光ファイバ線路に大きな損失の構成部品を含むときに
適用する。領域Cは,光ファイバ線路に強い反射の構成部品を含むときに適用する。
図9−損失測定サンプルの推奨領域A
7.3に規定する方法のそれぞれについて,サンプル設定の試験計画を立てる。各サンプル設定は,位置及
び表示パワーレベルの組合せとする。目標は,垂直サンプル0.5〜1 dB,基準損失Aref以下とする。サンプ
ルは,F0から雑音レベルまでの減衰範囲で,領域A内で均一に分布するように選択することが望ましい。
また,図10に示すように同じ表示パワーレベルで,位置の異なる測定サンプルをオーバーラップさせて選
択することが望ましい。
図10−領域A内のサンプル点の望ましい配置
25
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7.3
OTDR光源のニアフィールド分布の明確化
7.3.1
目標及び参照元
ここでの目標は,試験用光コードの出射端に到達する光のニアフィールド分布の測定から式(39)を用い
て算出するエンサークルドフラックス関数EF(r) を決定し,その結果を動径方向の境界に対する要求条件
と比較することである。
()
()
()
∫
∫
=
R
r
dx
x
xI
dx
x
xI
r
EF
0
0
································································ (39)
測定に対する要求条件は,IEC 61280-4-1による。
また,手順の詳細は,IEC 61280-1-4で規定しており,校正法については,JIS C 6828に記述している。
7.3.2
手順
IEC 61280-1-4の要求条件に適合させるため,OTDR光源のニアフィールド分布は試験用光コードの出射
端のコネクタ位置で測定する。まず,OTDR試験用光コードの出射端をニアフィールド分布の測定系に接
続し,引用する文献の定義に従ってエンサークルドフラックス関数を測定する。次に,その測定結果を,
規定するエンサークルドフラックス関数の下限値及び上限値とともに同一のグラフに表示する。その結果,
測定されたエンサークルドフラックス関数の曲線が規定した下限値と上限値との間からはみ出さないこと
を確認する。
8
損失の校正方法
8.1
はじめに
既知の参照値に対する損失を与える校正方法は,ここでは規定しない。
8.2の方法では,損失参照値は未知であり,単に定数であると考える。それゆえ,その結果は変動だけを
表している。一方で,適切な不確かさレベルで減衰が分かる場合,その測定結果は,別の方法で報告可能
である(8.2.4参照)。
8.2
長尺ファイバ法
8.2.1
要点
長尺ファイバ法とは,長尺のマルチモード光ファイバを用いて,OTDRの垂直軸スケールの線形性を測
定する方法である。この参照損失値は未知であり,単に定数であると考える。
8.2.2
装置
8.2.2.1
一般事項
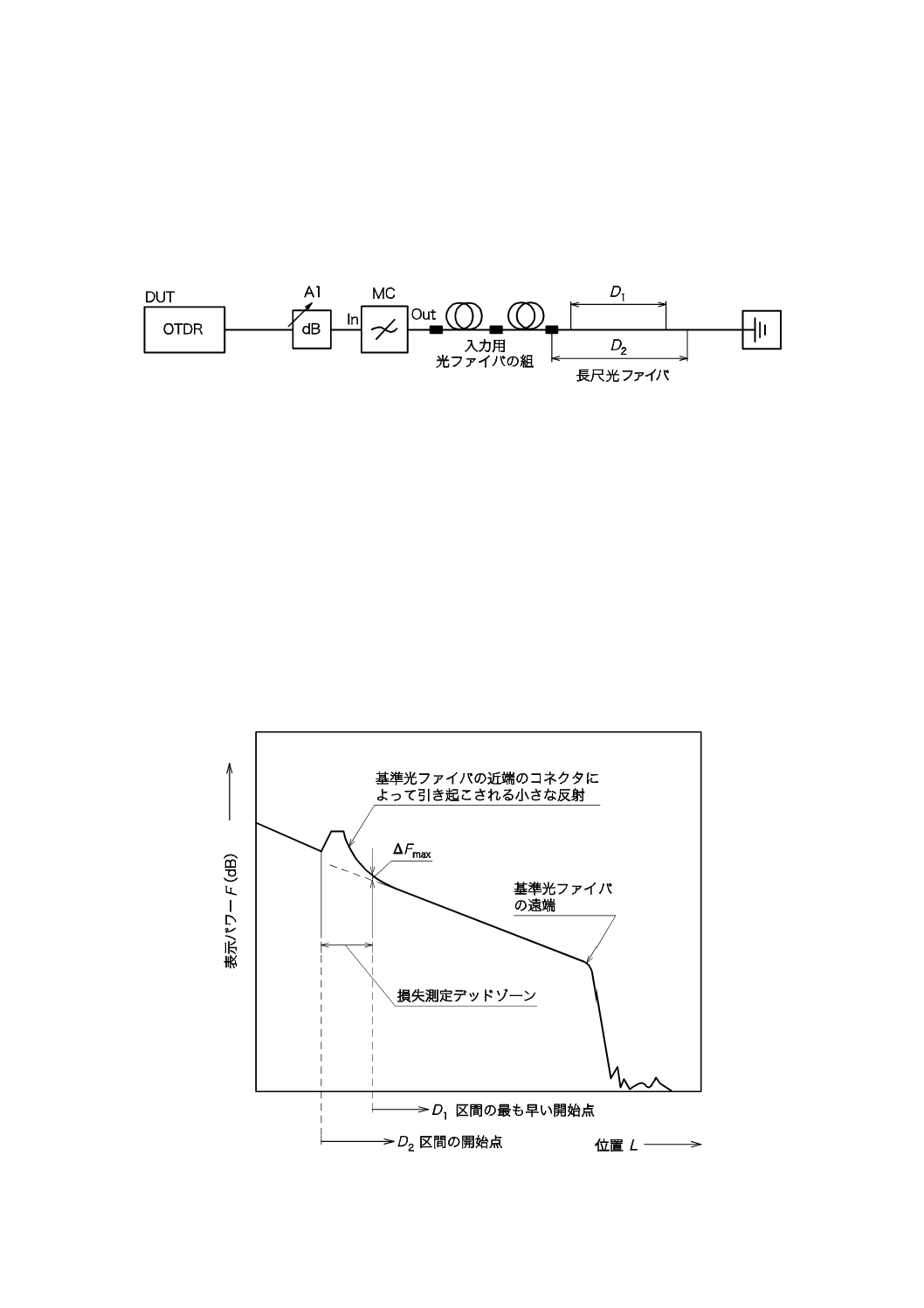
測定装置には,試験OTDR以外に,図11に示す次のものを含む。
a) 長尺マルチモード光ファイバで,SGI-50/125又はSGI-62.5/125の光ファイバ(JIS C 6832参照)
b) 一組のマルチモード入力用光ファイバ。これらは,最小1 dBの減衰をつくることができるSGI-50/125
又はSGI-62.5/125の光ファイバ(JIS C 6832参照)とする。
c) マルチモード光ファイバ用可変光減衰器
d) モードコンディショナ
光減衰器及び入力用光ファイバは,OTDR表示の領域A(箇条7参照)内の数多くの異なる位置に基準
光ファイバによる波形を表示するために用いる。例えば,表示パワーレベルは,減衰値が2 dB,4 dB,8 dB
の3本の入力用光ファイバを適切に組み合わせることによって,16 dBの範囲内で2 dBずつ変化させるこ
とができる。
26
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
これらの光ファイバは,低反射率コネクタを用いて接続することが望ましい。減衰量には,代表的なコ
ネクタの損失値を含む。推奨する(精細な)サンプル間隔0.5 dBを得るためには,光減衰器は0.5 dBずつ,
ゼロ(0)から1.5 dBの間で変えなければならない。
推奨する0.5 dBずつの変化を数多くの入力用光ファイバによって作り出す場合,光減衰器は不要である。
モードコンディショナは,出射条件を整えるために用いる。
A1:可変光減衰器
MC:モードコンディショナ
図11−長尺光ファイバによる線形性測定
8.2.2.2
初期損失の決定
この細分箇条の手順の目的は,常に同じ損失を測定するために,光ファイバ上の正しく定義した参照ポ
イントを用いることである。
長さ測定についてのOTDRのマニュアルに従って,長尺光ファイバの全長D2を測定する。OTDRマー
カを用い,光ファイバの長さD1の区間を選択する。このとき,光ファイバの近端のコネクタによる損失測
定デッドゾーンを外して選択する(図12参照)。この区間の開始点は,実際の後方散乱光波形とその直線
近似線間の差∆Fmaxが十分に小さくなるように選択する(この条件を達成するには,1本の入力用光ファ
イバが必要な場合がある。)区間D1の長さを測定する。
図12−損失測定デッドゾーンを外してD1区間の最も早い開始点を配置する方法
27
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
長さD1は,約0.5 dBの初期損失に相当する長さが望ましい。基準光ファイバの遠端からの後方反射が
生じると,先行する後方散乱光波形に影響することがあるため,後方反射が生じないように十分な注意が
必要である。
8.2.3
測定手順
8.2.3.1
準備
最初に,垂直軸方向のサンプル間隔がおおむね0.5 dBになり,全ての測定サンプルがOTDR表示の領域
A内に入るように光ファイバ及び光減衰器の試験計画を立てる。その一例を,8.2.2に規定している。
8.2.3.2
測定結果
各表示パワーレベルFiについて,損失値Aotdr, iを測定する。不確かさを小さくするために,単一パワー
レベルを用いる代わりに,マーカの周り又は長さD1全体にわたって平均化することが望ましい。タイプA
の不確かさを小さくするためには,低い表示パワーレベルにおいてできるだけOTDRの平均化を行う。こ
の場合,適用された平均化回数は,全て報告することが望ましい。全てのAotdr, i,表示パワーレベルFi及
び位置Liを記録する。
8.2.4
計算及び結果
式(40)を用いて,非線形性NLlossを算出する。
otdr,0
otdr,
loss
max
A
A
NL
i−
±
=
(dB) ················································ (40)
適切な損失の不確かさレベルで光ファイバの減衰Arefが既知であれば,式(41)を用いて損失偏差サンプ
ルΔAiを算出してもよい。
ref
otdr,
A
A
A
i
i
−
=
∆
(dB) ····························································· (41)
式(42)を用いて損失スケール偏差を報告してもよい。
ref
ref
otdr,
A,
A
A
A
S
i
i
−
=
∆
(dB/dB) ······················································ (42)
28
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
距離校正用のマルチモードループ遅延線
A.0 一般事項
この附属書では,マルチモード光ファイバ用OTDRの距離校正のための部品として用いる,光ファイバ
形ループ遅延線について規定する。
A.1 構造
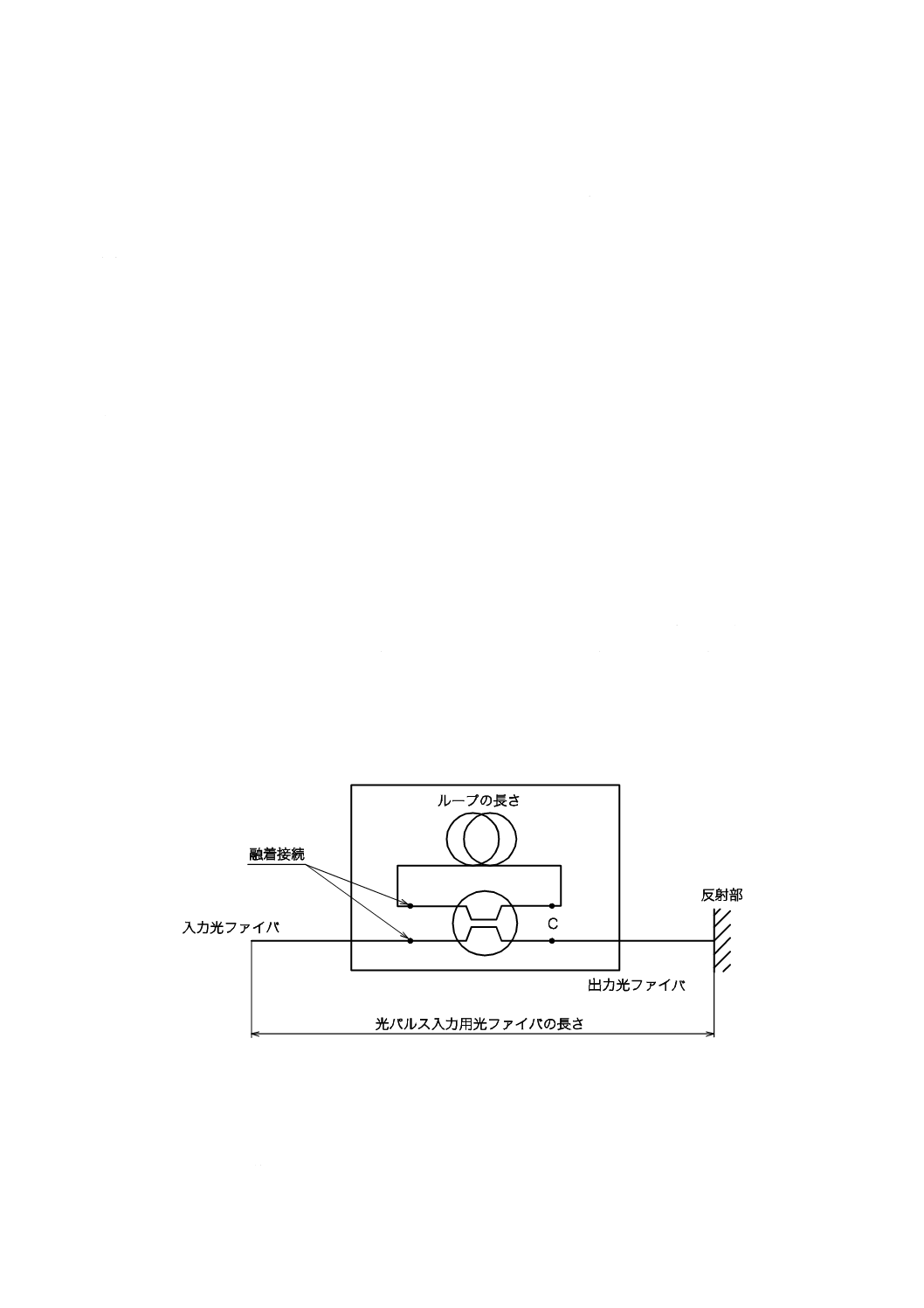
装置は,図A.1に示すように,次のものから構成する。
a) マルチモード4端子光カプラ:一対の入出力端間に長尺光ファイバ(長さは校正する距離範囲による。)
が融着接続されているもの。OTDRの光ファイバタイプとは無関係に,光ファイバのコア径は,50 μm
又は62.5 μmとする。同一の光ファイバコア径は,挿入損失を最小に保ち,超長距離測定に用いられ
る。光ファイバの種類及び出射条件にかかわらず,長尺光ファイバの長さは,モード分散を許容範囲
内に保つために1 kmを超えてはならない。
b) 入力光ファイバ:4端子光カプラの第2入力端子に融着接続した,入力側がコネクタ付きの入力光フ
ァイバ(代表的な長さは,約250 m)。
c) 出力光ファイバ:4端子光カプラの第2出力端子に融着接続した,終端に後方反射を抑圧したコネク
タを備えた1本の出力光ファイバ。この光ファイバの長さは,例えば,1 m未満など,短く抑える。
d) 反射部:出力光ファイバの端面で反射を生じさせるために用いる反射率が大きい反射部品。
光パルス入力用光ファイバの長さは,入力光ファイバ,光カプラの一つの分岐枝及び出力光ファイバに
よって定義する。
ループの長さは,a) に規定する長尺光ファイバ及び光カプラの別のもう一つの分岐枝によって定義する。
図A.1−ループ遅延線
A.2 校正
A.2.1 一般事項
目的は,ループ遅延線を,二つのパラメータ,すなわち,ループ内の光ファイバの伝搬時間Tb及び光パ
29
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ルス入力用光ファイバの伝搬時間Taについて校正することである。後者は,入力光ファイバ,光カプラピ
グテール及び出力光ファイバの伝搬時間の合計である。
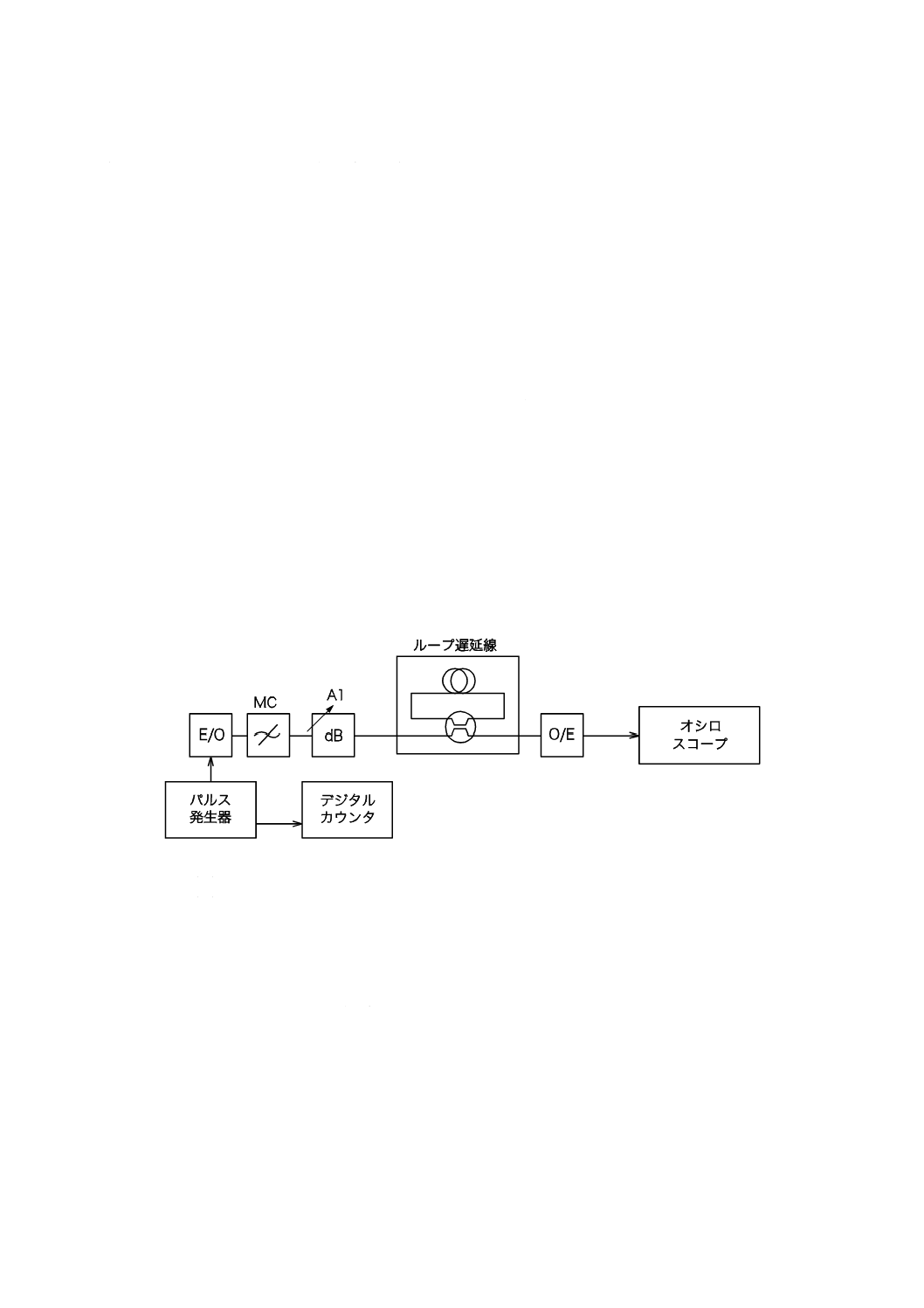
A.2.2 測定装置
測定装置は,パルスの繰返し周期及び遅延時間を変えることができるパルス発生器,デジタルカウンタ,
E/O変換器,O/E変換器,オシロスコープ及び光減衰器によって構成する。E/O変換器は,その中心光波
長が分かっていなければならない。
A.2.3 手順
A.2.3.1 ループ伝搬時間の測定
ループ伝搬時間を求めるためのシステム構成を,図A.2に示す。OTDRの出射条件に似た出射条件を確
立するか,又はより過剰に入射させるためにモードコンディショナ(MC)を用いる。パルス発生器を適
切な幅のパルスを発生するように設定し,光減衰器をE/O変換器に対し適切な振幅を発生するように設定
する。パルスの繰返し周波数(単位は,kHz)を200/Lbに設定する。ここで,Lbはループ内の光ファイバ
のおおよその長さ(単位は,km)である。O/E変換器からの出力パルスをオシロスコープで見て,次に規
定する二つのパルスが,オシロスコープの波形上で重なるようにパルスの繰返し周波数を調整する。二つ
のパルスのうち,一つは,E/O変換器から,ループを回らずに直接O/E変換器に伝達した光パルスであり,
もう一つは,ループを一度走行してきた進行光パルスの一部分であり,一緒に検出する。デジタルカウン
タによって繰返し周波数を記録する。これが,ループ伝搬時間Tbである。繰返し周波数に小さな変化を与
えることによって不確かさuTbを概算する。
MC:モードコンディショナ
E/O:E/O変換器
O/E:O/E変換器
A1:可変光減衰器
図A.2−ループ伝搬時間Tbの測定システム構成
A.2.3.2 光パルス入力用光ファイバ伝搬時間の測定
光パルス入力用光ファイバの伝搬時間を校正するためのシステム構成を,図A.3に示す。OTDRの出射
条件に似た出射条件を確立するか,又はより過剰に入射させるためにモードコンディショナ(MC)を用
いる。パルス発生器のパルス幅,振幅及び繰返し周波数(推奨値は,約1 kHz。)を適切な値に調整し,デ
ジタルカウンタにトリガ信号を与える。カウンタによっては,開始トリガと停止トリガとの間に“不感時
間”をもつものがあるため,このトリガパルスに対し,E/O変換器への出力パルスを遅延させる必要があ
る場合がある。カウンタのチャネルBのトリガレベルを,カウンタがO/E変換器の信号出力を受けたとき
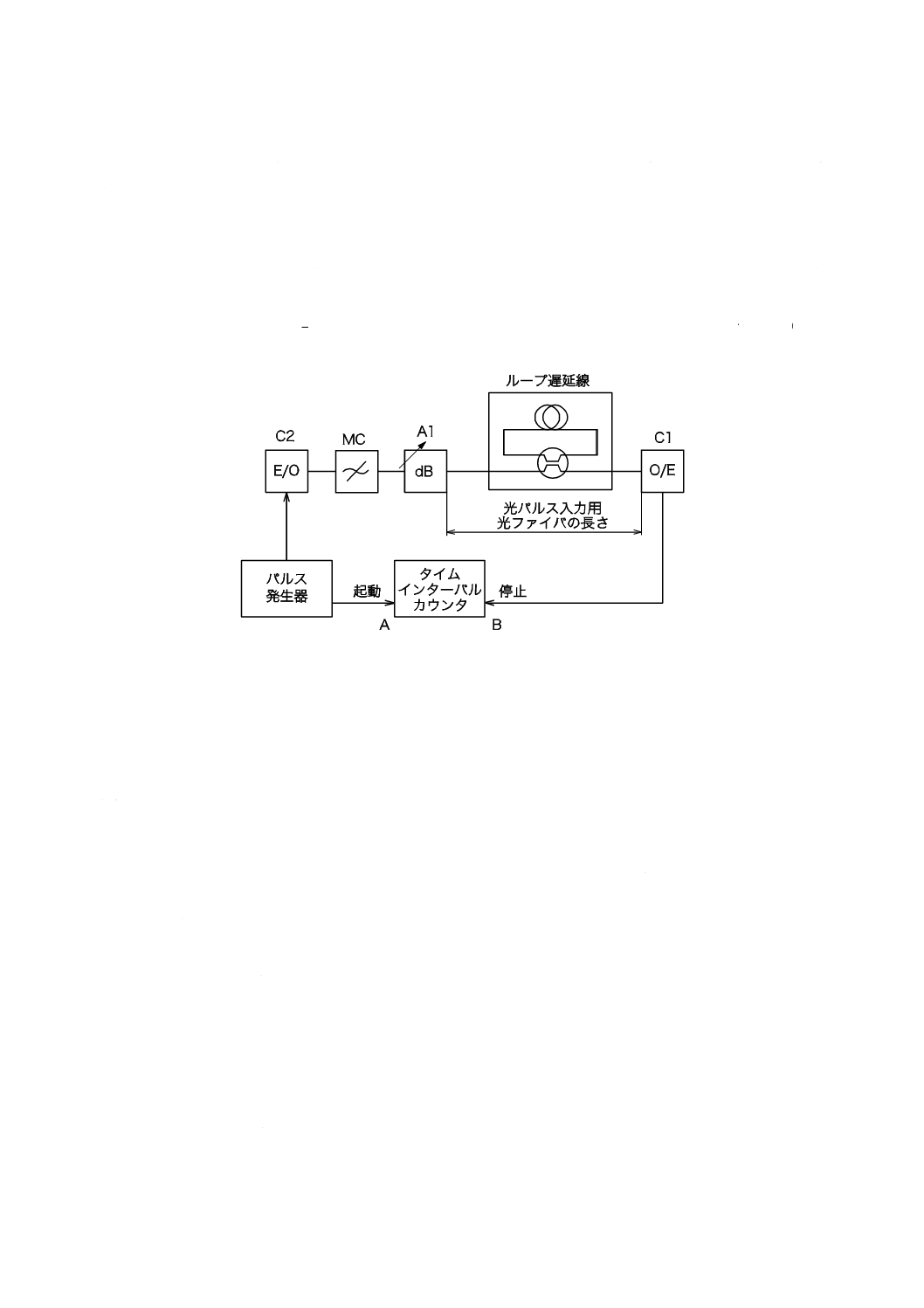
30
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
にだけトリガするように調整する。これは,カウンタが,ループを1回以上回ってきた減衰したパルスに
よってトリガすることを防止するためである。カウンタによって表示した伝搬時間T1を記録する。O/E変
換器の出力を一時的にカウンタから外し,オシロスコープに接続し,直接伝達したパルスを見て,それら
の振幅を書き留める。次に,ループ遅延線を取り除き,O/E変換器を直接光減衰器に接続する。オシロス
コープで再びパルスを観測し,光減衰器を前と同じ振幅のパルスを発生するように調整する。O/E変換器
出力を再びカウンタに接続し,伝搬時間T2を測定する。以上の測定から,光パルス入力用光ファイバの伝
搬時間Taは,式(A.1)を用いて算出する。
2
1
a
T
T
T
−
=
············································································· (A.1)
MC:モードコンディショナ
E/O:E/O変換器
O/E:O/E変換器
A1:可変光減衰器
図A.3−光パルス入力用光ファイバ伝搬時間Taの校正システム構成
A.3 不確かさ
不確かさを計算し,規定する場合,附属書Bの数学的根拠(のガイドライン)を用いることが望ましい。
ループ伝搬時間の不確かさuTbは,次に示す各要因の二乗和平方根を算出することによって求める。
uTb, counter: クロック周波数の不確かさ及び時間間隔分解能によるデジタルカウンタの時間の
不確かさ(s)
uTb, adjust: オシロスコープを用いて繰返し周期を調整することによる時間の不確かさ(s)
uTb, λ: E/O変換器の中心光波長の不確かさによる時間の不確かさ(s)。波長の不確かさに
光ファイバの長さLb及び波長分散を乗じることによって算出できる。
uTb, θ: 光ファイバの温度係数による時間の不確かさ。代表値は,許容温度範囲内で1
cm/(km℃)。
uTb, MD: 適用した出射条件におけるモード分散による時間の不確かさ。
光パルス入力用光ファイバ伝搬時間の不確かさuTaは,次に示す各要因の二乗和平方根を算出すること
によって求める。
uTa, counter: クロック周波数の不確かさ,時間間隔分解能及びトリガ振幅の設定によるデジタル
カウンタの時間の不確かさ(s)
uTa, typeA: 例えば,タイミングジッタによる時間のタイプAの不確かさ(s)。一連の継続的
なカウンタの読取り値から得ることができる。
uTa, λ: E/O変換器の中心光波長の不確かさによる時間の不確かさ(s)。波長の不確かさに
31
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
光ファイバの長さLa及び波長分散を乗じることによって算出できる。
uTa, θ: 光ファイバの温度係数による時間の不確かさ。代表値は,許容温度範囲内で1
cm/(km℃)。
uTa, MD: 適用した出射条件におけるモード分散による時間の不確かさ。
測定のシステム構成及び手順によっては,追加の要因を考慮に入れる。
A.4 文書化
ループ遅延線には,次の事項を記述した文書を校正結果を添付する。
a) 光パルス入力用光ファイバ及びループのおおよその長さ
b) 光パルス入力用光ファイバ及びループの測定した伝搬時間
c) E/O変換器の中心光波長
d) A.3に従って算出した時間の不確かさ,±2 uTa及び±2 uTb
32
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(規定)
数学的根拠
B.0
一般事項
この附属書では,測定の不確かさの要約及び評価を集積して報告する形態を示す。これは,ISO/IEC
Guide 98-3:2008の“計測における不確かさの表現の指針”に基づくが,この附属書は,この指針に記載さ
れている詳細内容を十分には反映していない。
標準として,測定の不確かさの評価方法について二つのタイプを規定する。タイプAは,同じ測定に対
する一連の繰返し測定を統計的に分析し,不確かさを評価する方法である。タイプBは,その他の知識に
基づいて,不確かさを評価する方法である。
B.1
タイプA評価の不確かさ
タイプA評価の標準不確かさは,同じ測定条件の下で,個別の独立した測定の場合に適用できる。
量Xについて,n回の独立な測定で得られたXkに対しての算術平均は,式(B.1)を用いて算出する。
∑
=
=
n
k
X
n
X
1
k
1
·········································································· (B.1)
この平均は,その量の推定値とされる。つまり,
X
x=
とする。測定に基づいて実験の標準偏差は,式(B.2)
を用いて算出する。
()
(
)
2
1
1
2
k
1
1
−
−
=
∑
=
n
k
X
X
n
X
s
······················································· (B.2)
ここに,
X: 測定した値の算術平均
Xk: 一連の測定の測定サンプル
n: 測定の回数で,例えば,n≧10のような大きな数字を想定する。
推定値をxとするとき,タイプAの標準不確かさutypeA(x) は,式(B.3)を用いて算出し,実験の平均値に
おける標準偏差で表す。
()()
()
n
X
s
X
s
x
u
=
=
typeA
······························································· (B.3)
B.2
タイプB評価の不確かさ
タイプB評価の標準不確かさは,一連の測定の統計的な分析以外によって不確かさを評価する方法であ
る。ここでは,数値の変動に関して得たあらゆる情報に基づいた科学的な判断によって評価する。
量Xの推定値xを,製造業者の仕様,校正証明書,ハンドブック又はその他の情報源から得て,その引
用した不確かさU(x) が,標準偏差のk倍ある場合,標準不確かさu(x) は,単に,式(B.4)となる。
()
()k
x
U
x
u
/
=
········································································· (B.4)
量Xについて,上限値Xmax及び下限値Xminが評価できる場合(例えば,製造業者の仕様又は温度範囲の
ような),長方形状の確率分布を推定して,推定値xは,式(B.5)を用いて算出する。
33
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(
)
min
max
2
1
X
X
x
+
=
·································································· (B.5)
標準不確かさは,式(B.6)を用いて算出する。
()
(
)
min
max
3
2
1
X
X
x
u
−
=
···························································· (B.6)
出力推定値y及び関連する標準不確かさへの寄与で,入力推定値x及び関連する標準的不確かさが要因
となって生じるものは,式(B.7)を用いて算出する。
()
()x
u
c
y
u
×
=
········································································· (B.7)
ここに,cは,入力推定値x及び関連する感度係数であって,その関係は式(B.8)で示し,これは,モデ
ル関数y(x) の入力推定値xに関する偏導関数である。
x
y
c∂∂
=
·················································································· (B.8)
感度係数cは,出力推定値yが,入力推定値xの変化によってどの程度影響を受けるかを示す。感度係
数cは,出力推定値yの変化分であって,それは,入力推定値xの変化からモデル関数y(x) を用いて算出
できる。また,式(B.8)又は数値計算でも計算できる。xの変化によって生じる出力推定値yの変化は,実
験で求めることが適切なこともある。
B.3
標準不確かさの合成
合成標準不確かさとは,個々の不確かさを集めて一つの量にまとめたものである。
標準不確かさは,個々の不確かさが統計上互いに独立であるとして,タイプA及びタイプBによって見
積もった全ての不確かさの二乗和の平方根をとって,式(B.9)のように合成する。
()
()
∑
=
n
i
iy
u
y
u
1
2
c
=
··································································· (B.9)
ここに,
i: 個々の要因の数
ui(y): それぞれの標準不確かさ
n: 不確かさの数
注記 この式では,最大の不確かさ(ばらつき量)の1/10以下の不確かさは,二乗すると1/100以下
となるので無視してもよい。
上記の量を基に,さらに,詳細に不確かさを算出する場合は,合成標準不確かさucを基準として,式(B.9)
に再投入すればよい。ここに,ucは,部分的にはタイプAの性格を帯びているが,タイプBの不確かさを
示している。
B.4
報告
校正報告書及び技術的なデータシートから集計した標準不確かさは,適用できる信頼水準とともに拡張
不確かさの形で報告する。それぞれの補正係数又は偏差も報告する。拡張不確かさUは,標準不確かさuc(y)
に包含係数kを乗じることによって式(B.10)のように得る。
()y
u
k
U
c
×
=
········································································· (B.10)
約95 %の信頼水準を推定値(デフォルト)として選択する場合,k=2となる。約99 %の信頼水準を選
34
C 6185-3:2014 (IEC 61746-2:2010)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
択する場合,k=3となる。これらのkの値は,特定の信頼水準に対してだけ用いることができる(ISO/IEC
Guide 98-3:2008参照)。したがって,より厳しい信頼水準に対しては,より大きな包含係数を用いる。
参考文献
[1] DANIELSON, DL. Backscatter measurements on optical fibers, NBS Technical Note 1034, US Department of
Commerce, 1981
[2] KAPRON, FP. et al. Fiber-optic reflection measurements using OCWR and OTDR techniques, Journal of
Lightwave Technology, Vol. 7, No. 8, August 1989
[3] JIS C 6802 レーザ製品の安全基準
注記 対応国際規格:IEC 60825-1,Safety of laser products−Part 1: Equipment classification and
requirements(IDT)
[4] JIS C 6803 レーザ製品の安全−光ファイバ通信システムの安全
注記 対応国際規格:IEC 60825-2,Safety of laser products−Part 2: Safety of optical fibre communication
systems (OFCS)(IDT)
[5] JIS C 61280-1-3 光ファイバ通信サブシステム試験方法−中心波長及びスペクトル幅測定
注記 対応国際規格:IEC 61280-1-3:1998,Fibre optic communication subsystem basic test procedures
−Part 1-3: Test procedures for general communication subsystems−Central wavelength and spectral
width measurement(IDT)
[6] JIS C 61300-3-6 光ファイバ接続デバイス及び光受動部品−基本試験及び測定手順−第3-6部:反射
減衰量測定
注記 対応国際規格:IEC 61300-3-6,Fibre optic interconnecting devices and passive components−Basic
test and measurement procedures−Part 3-6: Examinations and measurements−Return loss(MOD)
[7] ISO/IEC Guide 99,International vocabulary of metrology−Basic and general concepts and associated terms
(VIM)
[8] IEC 60050-731,International Electrotechnical Vocabulary (IEV)−Chapter 731: Optical fibre communication
[9] IEC 60793-1-1,Optical fibres−Part 1-1: Measurement methods and test procedures−General and guidance
[10] IEC/TR 61930:1998,Fibre optic graphical symbology
[11] IEC/TR 61931:1998,Fibre optic−Terminology