C 4034-2-1:2011
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1 適用範囲 ························································································································· 1
2 引用規格 ························································································································· 1
3 用語及び定義 ··················································································································· 2
4 記号及び略語 ··················································································································· 4
4.1 記号 ···························································································································· 4
4.2 下付き添字 ··················································································································· 6
5 基本要求事項 ··················································································································· 6
5.1 直接的及び間接的な効率の算定························································································· 6
5.2 不確かさ ······················································································································ 7
5.3 推奨試験方法 ················································································································ 7
5.4 電源 ···························································································································· 8
5.5 計測器 ························································································································· 8
5.6 単位 ···························································································································· 9
5.7 抵抗値 ························································································································· 9
6 効率の算定のための試験方法 ····························································································· 10
6.1 電動機の状態及び試験の種類··························································································· 10
6.2 励磁回路測定 ··············································································································· 10
6.3 直接測定 ····················································································································· 10
6.4 間接測定 ····················································································································· 12
7 効率の算定(直流機) ······································································································ 17
8 効率の算定 ····················································································································· 17
8.1 直接測定からの算定 ······································································································ 17
8.2 間接測定からの算定 ······································································································ 17
9 効率の算定(同期機) ······································································································ 26
附属書A(規定)動力計のトルクの読取りの補正 ······································································ 27
附属書B(規定)Eh星形法の数値計算 ···················································································· 28
附属書C(参考)励磁回路の種類 ··························································································· 31
附属書D(規定)ほかの試験方法 ··························································································· 32
附属書JA(参考)JISと対応国際規格との対比表 ······································································ 33
C 4034-2-1:2011
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,社団法人日本電機工業会(JEMA)及び財団
法人日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本
工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
この規格は,著作権法で保護対象となっている著作物である。
この規格の一部が,特許権,出願公開後の特許出願又は実用新案権に抵触する可能性があることに注意
を喚起する。経済産業大臣及び日本工業標準調査会は,このような特許権,出願公開後の特許出願及び実
用新案権に関わる確認について,責任はもたない。
JIS C 4034の規格群には,次に示す部編成がある。
JIS C 4034-1 第1部:定格及び特性
JIS C 4034-2-1 第2-1部:単一速度三相かご形誘導電動機の損失及び効率の算定方法
JIS C 4034-5 第5部:外被構造による保護方式の分類
JIS C 4034-6 第6部:冷却方式による分類
JIS C 4034-30 第30部:単一速度三相かご形誘導電動機の効率クラス(IEコード)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
C 4034-2-1:2011
回転電気機械−
第2-1部:単一速度三相かご形誘導電動機の
損失及び効率の算定方法
Rotating electrical machines-
Part 2-1: Methods for determining losses and efficiency
from tests of single-speed, three-phase, cage-induction motors
序文
この規格は,2007年に第1版として発行されたIEC 60034-2-1を基に,技術的内容を変更することなく
作成した日本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,対応国際規格を変更している事項である。
変更の一覧表にその説明を付けて,附属書JAに示す。
1
適用範囲
この規格は,単一速度三相かご形誘導電動機(以下,電動機という。)の効率を試験から算定するための
方法,及び個々の損失を求める方法について規定する。
注記 この規格の対応国際規格及びその対応の程度を表す記号を,次に示す。
IEC 60034-2-1:2007,Rotating electrical machines−Part 2-1: Standard methods for determining losses
and efficiency from tests (excluding machines for traction vehicles)(MOD)
なお,対応の程度を表す記号“MOD”は,ISO/IEC Guide 21-1に基づき,“修正している”
ことを示す。
2
引用規格
次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成する。これらの
引用規格は,その最新版(追補を含む。)を適用する。
JIS C 1102-1 直動式指示電気計器−第1部:定義及び共通する要求事項
注記 対応国際規格:IEC 60051-1,Direct acting indicating analogue electrical measuring instruments and
their accessories−Part 1: Definitions and general requirements common to all parts(MOD)
JIS C 1731-1 計器用変成器−(標準用及び一般計測用)第1部:変流器
注記 対応国際規格:IEC 60044-1,Instrument transformers−Part 1: Current transformers(MOD)
JIS C 4034-1 回転電気機械−第1部:定格及び特性
注記 対応国際規格:IEC 60034-1:1996,Rotating electrical machines−Part 1: Rating and performance
(MOD)
2
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
JIS Z 8203 国際単位系(SI)及びその使い方
IEC 60034-29,Rotating electrical machines−Part 29: Equivalent loading and superposition techniques−
Indirect testing to determine temperature rise
3
用語及び定義
この規格で用いる主な用語及び定義は,JIS C 1102-1及びJIS C 4034-1によるほか,次による。
3.1
効率(efficiency)
同じ単位で表示した入力に対する出力の比。通常,%(百分率)で表す。
3.2
直接的な効率決定のための試験
3.2.1
一般事項
入力及び出力を直接測定して,効率を直接的に決定する方法に関する用語は,次による。
3.2.2
トルクメータ試験(torque meter test)
回転速度とともに,トルクメータを用いて軸トルクを測定して,電動機の機械的出力を算定する試験。
3.2.3
動力計試験(dynamometer test)
動力計を用いて軸トルクを測定する試験。試験方法は,3.2.2参照。
3.2.4
別々の電源に接続する返還負荷法(dual-supply back-to-back test)
2台の同一の電動機を機械的に直結し,1台の電動機への電気的入力とほかの1台の電動機の電気的出力
との差から両方の電動機の全損失を計算する試験。
3.3
間接的な効率算定のための試験
3.3.1
一般事項
入力又は出力を測定して全損失を算定して,効率を間接的に算定する試験に関する用語は,次による。
なお,この損失を出力に加えて入力を求める又は入力から減じて出力を求める。
3.3.2
同一の電源に接続する返還負荷法(single-supply back-to-back test)
(巻線形誘導機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
3.3.3
無負荷試験(no-load test)
電動機を無負荷で運転する試験。
3.3.4
ゼロ力率試験(zero power factor test)(同期機)
(同期機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
3.3.5
等価回路法(equivalent circuit method)
損失を,等価回路モデルを用いて算定する試験。
3.3.6
回転子取外し及び逆回転試験(test with rotor removed and reverse rotation test)
3
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
回転子を取り外して行う試験,及び回転磁界に対して回転子を反対方向に回転させる試験で,漂遊負荷
損を算定する組合せ試験。
3.3.7
短絡試験(short-circuit test)(同期機)
(同期機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
3.3.8
回転子拘束試験(locked rotor test)
回転子を拘束して回転しない状態で行う試験。
3.3.9
Eh星形試験(Eh-star test)
電動機を不平衡な電圧の星形結線で運転する試験。
3.4
損失
3.4.1
全損失,PT(total losses)
入力と出力との差。固定損(3.4.2参照),負荷損(3.4.4参照)及び漂遊負荷損(3.4.5参照)の和に等し
い。
3.4.2
固定損
3.4.2.1
固定損,Pk(constant losses)
鉄損,摩擦損及び風損の合計。
3.4.2.2
鉄損,Pfe(iron losses)
鉄心の損失及び鉄心以外の金属部における付加的な無負荷損。
3.4.2.3
摩擦損及び風損
3.4.2.3.1
摩擦損(friction losses)
定格条件での軸受の摩擦による損失。別置きの潤滑系統の損失を含まない。電動機で駆動する機械と共
通の軸受の損失は,その軸受を電動機に用いているかどうかにかかわらず,分けて規定する。軸受の損失
は,軸受の運転温度,潤滑油の種類及び潤滑油の温度で決まる。
立軸機の場合,スラスト軸受の損失は,外部スラストを除いた値とする。
注記1 別置きの潤滑システムの損失が必要な場合は,別に記載することが望ましい。
注記2 外部スラストによる追加損は,受渡当事者間の合意によって別に表示してもよい。その場合,
表示には,スラスト負荷,軸受温度,潤滑油の種類及び潤滑油の温度を含むことが望ましい。
注記3 スラスト負荷による摩擦損は,受渡当事者間の合意によって含めてもよい。
3.4.2.3.2
風損(windage losses)
電動機の全ての部品での空気力学的摩擦による全損失。軸に取り付けたファン及び電動機と一体をなす
補機とで消費する電力を含む。
注記 別置きの通風システムの損失は,別に列挙することが望ましい。
4
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.4.3
励磁回路損(Excitation circuit losses)
(同期機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
3.4.4
負荷損
3.4.4.1
負荷損,PL(load losses)
巻線損(巻線のI2R損)(3.4.4.2参照)の和。
3.4.4.2
巻線損,Pw(winding losses)
電動機の固定子及び回転子の巻線でのI2R損。
3.4.4.3
ブラシ損(brush losses)
(直流機及び巻線形誘導機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とし
た。)
3.4.5
漂遊負荷損,PLL(stray-load losses)
導体以外の金属部分及び鉄心で,負荷電流によって発生する損失。巻線導体の負荷電流を原因とする磁
束脈動で起きる渦電流損である。付加的な負荷損(additional load losses)ともいう。
注記 これらの損失は,3.4.2.2の付加的な無負荷損を含まない。
3.4.6
短絡損(short-circuit losses)
(同期機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
3.5
試験量
3.5.1
端子電圧(terminal voltage)
各端子間の電圧の算術平均。
3.5.2
線電流(line current)
各端子に流れる電流の算術平均。
3.5.3
端子間抵抗値(line-to-line resistance)
各端子間の抵抗値の算術平均。
注記 星形結線した電動機の場合,相抵抗値は,端子間抵抗値の0.5倍となる。三角結線の場合,相
抵抗値は,端子間抵抗値の1.5倍となる。
4
記号及び略語
4.1
記号
この規格で用いる主な記号は,次による。
cosϕ :力率
注記1 力率は,正弦波電圧及び正弦波電流を前提としている。
f
:電源周波数(Hz)
5
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
I
:平均線電流(A)
kθ :温度補正係数
n
:回転速度(s−1)
nsyn :同期回転速度(s−1)
p
:極対の数
P
:電力(W)
P0 :無負荷での入力(W)
P1 :入力(W)
注記2 特に規定がない限り,この規格で規定する試験は電動機運転のためのもので,P1は電気的入
力である。
P2 :出力(W)
注記3 特に規定がない限り,この規格で規定する試験は電動機運転のためのもので,P2は機械的出
力である。
Pfe :鉄損(W)
Pfw :摩擦損及び風損(W)
Pk :固定損(W)
PL :負荷損(W)
PLr :残留損(W)
PLL :漂遊負荷損(W)
Pmech:機械的動力(W)
PT :全損失(W)
Pw :巻線損(W) 下付き添字のwは,s又はrで置き換える場合がある。
R
:巻線抵抗値(Ω)
Reh :Eh星形試験(6.4.5.5参照)に用いる補助抵抗の実際の値(Ω)
R'eh :補助抵抗の代表的な値(Ω)
Rll :平均端子間抵抗値(Ω)
s
:滑り。滑りは,同期速度の単位当たりの量で表す。
T
:電動機のトルク(N・m)
Td :トルク測定装置の読取り(N・m)
Tc :トルク補正(N・m)
U
:平均端子電圧(V)
U0 :無負荷での端子電圧(V)
UN :定格端子電圧(V)
X
:リアクタンス(Ω)
例1
X
j
R
Z
×
+
=
複素量の表現
注記4 例1は,インピーダンスの場合である。jは虚数単位。
例2
2
2X
R
Z
Z
+
=
=
複素量の絶対値の表現
注記5 例2は,インピーダンスの場合である。
Z
:インピーダンス(Ω)
η
:効率
6
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
θc :一次冷媒入口温度(℃)
θw :巻線温度(℃)
τ
:時定数(s)
4.2
下付き添字
次の下付き添字を,電動機の機能を明確にするため,又は値を区別するために,4.1に規定した記号に追
加してもよい。
機械の構成品
r
:回転子
s
:固定子
w
:巻線
U,V,W:相の名称
機械の種類
D
:動力計
G
:発電機
M :電動機
運転条件
0
:無負荷
1
:入力
2
:出力
av :平均
d
:放散
el
:電気的
i
:内部
L
:試験負荷
lr
:回転子拘束
mech:機械的
N
:定格
red :低減電圧
t
:試験
θ
:基準冷媒温度に補正済み
注記 これら以外の下付き添字は,関連する箇条で説明する。
5
基本要求事項
5.1
直接的及び間接的な効率の算定
試験を次の3種類に分類する。
a) 1台の電動機の入力及び出力測定 電動機の電気的入力及び機械的出力の測定からなる。
b) 返還負荷法における2台の同一の電動機の入力及び出力の測定 電動機の機械的動力の入力又は出力
の測定を省略するために行う。
c) 特定の条件の下での,電動機の実際の損失の測定 通常,この測定は全損失ではなく,幾つかの損失
成分からなる。この方法は,全損失又は損失成分を計算するために用いてもよい。
7
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
全損失は,次の方法のうちの一つによって求める。
− 全損失を測定する。
− 個々の損失を求めて合計する。
注記 電動機の効率を算定する方法は,幾つかの前提に基づくので,異なる方法で求めた効率の値を
比較することはできない。
5.2
不確かさ
この規格で用いる不確かさとは,真の効率を算定することの不確かさをいい,試験手順及び試験装置に
おけるばらつきを反映する。
不確かさは,数値として表すことが望ましいが,そのためには代表値及び比較値を算定するための十分
な試験を必要とする。この規格では,次の相対的な不確かさの用語を用いる。
− “低”は,試験結果だけに基づく効率算定に適用する。
− “中”は,一部が近似に基づく効率算定に適用する。
− “高”は,仮定に基づく効率算定に適用する。
5.3
推奨試験方法
効率を算定するための具体的な基準を確立することは難しい。実施する試験は,必要な情報,必要な精
度,電動機の種類及び寸法,並びに使用可能な現場試験装置(電源,負荷及び/又は駆動機)によって選
択する。
推奨試験方法は,表1による。試験方法は,不確かさ“低”の方法から選択するのが望ましい。
8
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
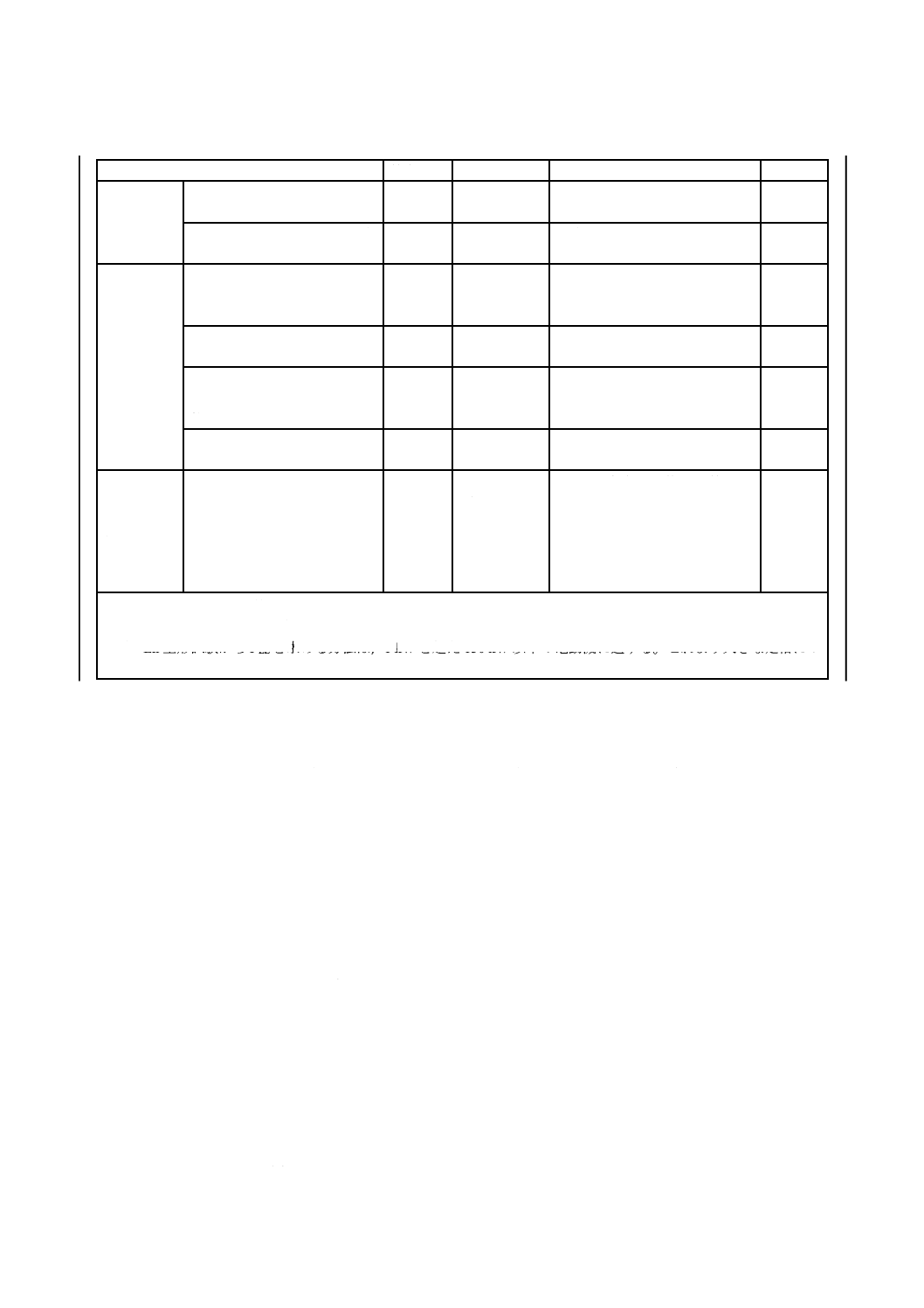
表1−推奨試験方法
方法
箇条番号 推奨適用出力
必要な設備
不確かさ
直接試験
トルク測定試験
8.1.1
≦1 kW
全負荷時のトルクを測定でき
るトルクメータ又は動力計。
低
別々の電源に接続する返還負
荷法
8.1.2
>0.75 kW,
≦375 kW
全負荷で試験するための装置
及び2台の同一の電動機。
低
漂遊負荷損
の算定
トルク測定を行う負荷試験に
よる漂遊負荷損PLLa) の算定
方法
8.2.2.5.1
>1 kW,
≦150 kW
全負荷の1.25倍以上を測定で
きるトルクメータ又は動力計。
低
規定する許容値による漂遊負
荷損PLLの決定方法
8.2.2.5.3
>0.75 kW,
≦375 kW
中又は高
回転子取外し試験及び逆回転
試験による漂遊負荷損PLLの
算定方法
8.2.2.5.2
>0.75 kW,
≦375 kW
定格出力が全損失PTの5倍以
下の駆動電動機。
高
Eh星形試験による漂遊負荷
損PLLb) の算定方法
8.2.2.5.4
>0.75 kW,
≦150 kW
定格相電流の150 %用の電流容
量がある抵抗器。
中
負荷試験な
しの等価回
路法による
算定
等価回路法による負荷損の算
定方法
8.2.2.4.3
>0.75 kW,
≦375 kW
ほかの試験用の装置が使用で
きない場合(例えば,定格負荷
を加えることができないとき,
同一機がないときなど,ほかの
試験用の装置が使用できない
場合)。
中又は高
注a) 残留損からPLLを算定する場合,相関係数(8.2.2.5.1.2参照)が0.95より大きくなるように制限しているが,
計測の精度によって,算定された効率が±0.5 %を超える不確かさをもつ可能性がある。
b) Eh星形試験からPLLを求める方法は,1 kWを超え150 kW以下の電動機に適する。これより大きな定格につ
いては検討中である。この方法は,巻線が星形に接続できることを必要とする。
5.4
電源
5.4.1
電圧
電圧は,JIS C 4034-1の6.2(電圧と電流の形状及び対称性)による。ただし,温度上昇試験では,JIS C
4034-1の7.3.1(電源)による。
5.4.2
周波数
周波数は,測定の間,定格周波数の±0.3 %に維持する。この要求事項は,等価回路法(6.4.4.4)には適
用しない。
5.5
計測器
5.5.1
一般事項
計測器の精度は,一般にフルスケールの百分率で表されるので,計測器は,測定範囲が実用的な範囲に
おいてできるだけ小さいものを選定する。
注記 アナログ計測器の場合は,観測値は計測器の値域の上から1/3に入ることが望ましい。
5.5.2
電気計器
電気計器は,JIS C 1102-1による精度階級0.2とする。
この規格にその他の規定がない場合には,三つの線電流及び三つの端子間電圧の相加(算術)平均を用
いる。
5.5.3
計器用変成器
計器用変成器は,JIS C 1731-1に従った確度をもち,一般的な試験のときには,その誤差は±0.5 %以下
9
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
とする。また,漂遊負荷損を8.2.2.5.1に従って算定する電動機の損失を合計して算出する場合は,その誤
差は±0.3 %以下とする。
5.5.4
トルク測定
トルクを測定するために使用する計測器は,精度階級0.2の精度とする。
動力計を用いて軸トルクを測定する場合は,トルク補正試験を行う。これは,トルク測定装置と電動機
の軸との間に軸受又はカップリングを挿入している場合にも適用する。電動機のトルクTは,次の式を用
いて算出する。
T=Td+Tc
5.5.5
回転速度測定及び周波数測定
周波数を測定するために使用する計測器は,±0.1 %の精度とする。回転速度の測定については,0.1 %
又は毎分1回転以内のうち,いずれか小さい誤差となる精度をもつ計測器であることが望ましい。
なお,適切な方法による滑りの測定で,回転速度を求めてもよい。
注記 毎分当たりの回転速度の値は,毎秒当たりの回転速度の値の60倍である。
5.5.6
温度測定
巻線温度を測定するために使用する計測器は,±1 ℃の精度とする。
5.6
単位
特に規定がない限り,値の単位はJIS Z 8203で規定するSI単位とする。
5.7
抵抗値
5.7.1
試験抵抗値
巻線抵抗値Rは,オームで表し,適切な方法によって測定する。
電動機において,R=Rllは3.5.3の固定子巻線の端子間抵抗値となる。温度(上昇)試験の最後における
試験抵抗値は,JIS C 4034-1の7.6.2.3.2(長い停止時間の場合)に規定の推定手順に準じて算定し,JIS C
4034-1の表4(電源開路後の経過時間)で規定する経過時間に換えて可能な最短の時間を用い,電源開路
直後の時間まで外挿する。
巻線の試験温度は,5.7.2による。
負荷時の端子間抵抗値が直接測定できないときは,試験抵抗値は,測定した抵抗値の温度と5.7.2のa)
〜e) のいずれかの方法に従い求めた温度との差によって補正する。
5.7.2
巻線温度
巻線の試験温度は,次の方法のうちのいずれかによって求める(推奨する順に示す)。
a) 定格負荷試験抵抗値RNから5.7.1の推定手順によって算定する。
b) 埋込温度計又は熱電対で直接測定する。
c) 同じ構造及び電気的設計の同一機で,a) に従い算定した温度を用いる。
d) 負荷容量が得られない場合は,IEC 60034-29の運転温度を用いる。
e) 定格負荷試験抵抗値RNが直接測定できない場合は,巻線温度は,表2に示す耐熱クラスの基準巻線温
度に等しいと仮定する。
10
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
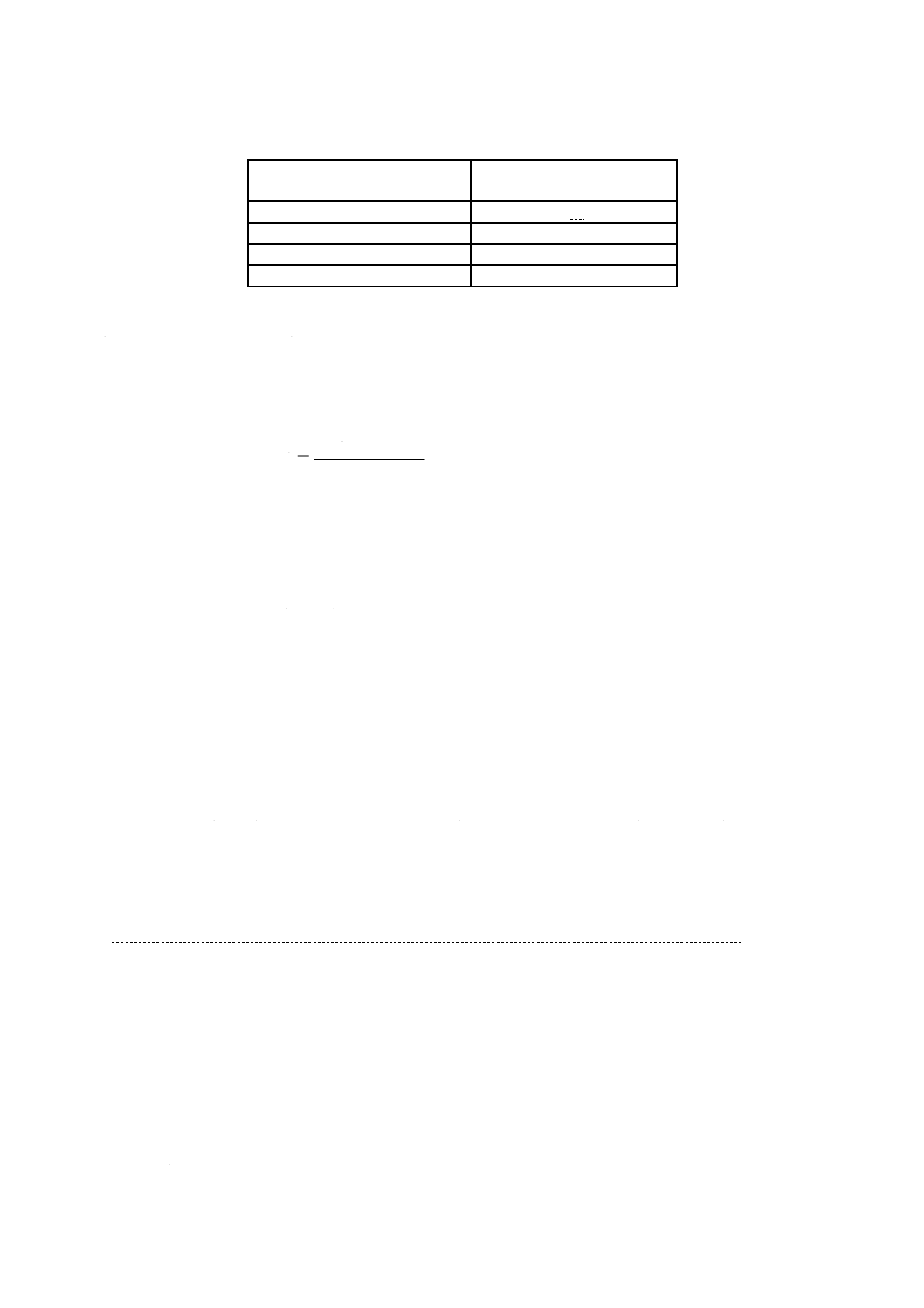
表2−基準巻線温度
絶縁システムの耐熱クラス
基準巻線温度
℃
120(E)
75
130(B)
95
155(F)
115
180(H)
135
定格時の温度と温度上昇との和が,用いている絶縁システムより低い耐熱クラスの場合は,基準巻線温
度より低い耐熱クラスの温度を採用する。
5.7.3
基準冷媒温度の補正
試験の間に記録した巻線抵抗値は,基準温度25 ℃に換算する。巻線抵抗値の基準冷媒温度25 ℃への補
正係数は,次の式によって算出する。
w
c
w
θ
235
25
235
θ
θ
θ
+
−
+
+
=
k
ここに,
kθ: 巻線の温度補正係数
θc: 試験の間の冷媒入口温度
θw: 5.7.2による巻線温度
温度定数235は銅のものであり,アルミニウム巻線の場合は,225に置き換える。
一次冷媒又は二次冷媒として水を用いる電動機については,水の基準温度は,JIS C 4034-1の表4に従
い25 ℃とする。受渡当事者間の合意によってこれに代わる値を指定してもよい。
6
効率の算定のための試験方法
6.1
電動機の状態及び試験の種類
通常の運転条件と同じか,又は非常に近い試験条件を得るために,試験は,基本的な構成品を含む,組
み立てた電動機で実施する。電動機は,特別な考慮なしに一連の生産品から無作為に選ぶことが望ましい。
類似設計の電動機を用いた付加的な試験によって,長期の運転後にシール要素の摩擦がわずかであると判
明した場合は,試験の間,シール要素を取り外してもよい。
試験手順を構成する個々の試験は,この規格に記載した順番で行わなければならない。個々の試験を間
隔を空けずに実施することは必須ではない。ただし,個々の試験を間隔を空けて又は独立して実施する場
合は,試験データの取得に先立ち,指定の温度条件を再測定しなければならない。
6.2
励磁回路測定
(同期機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
6.3
直接測定
6.3.1
トルク測定試験
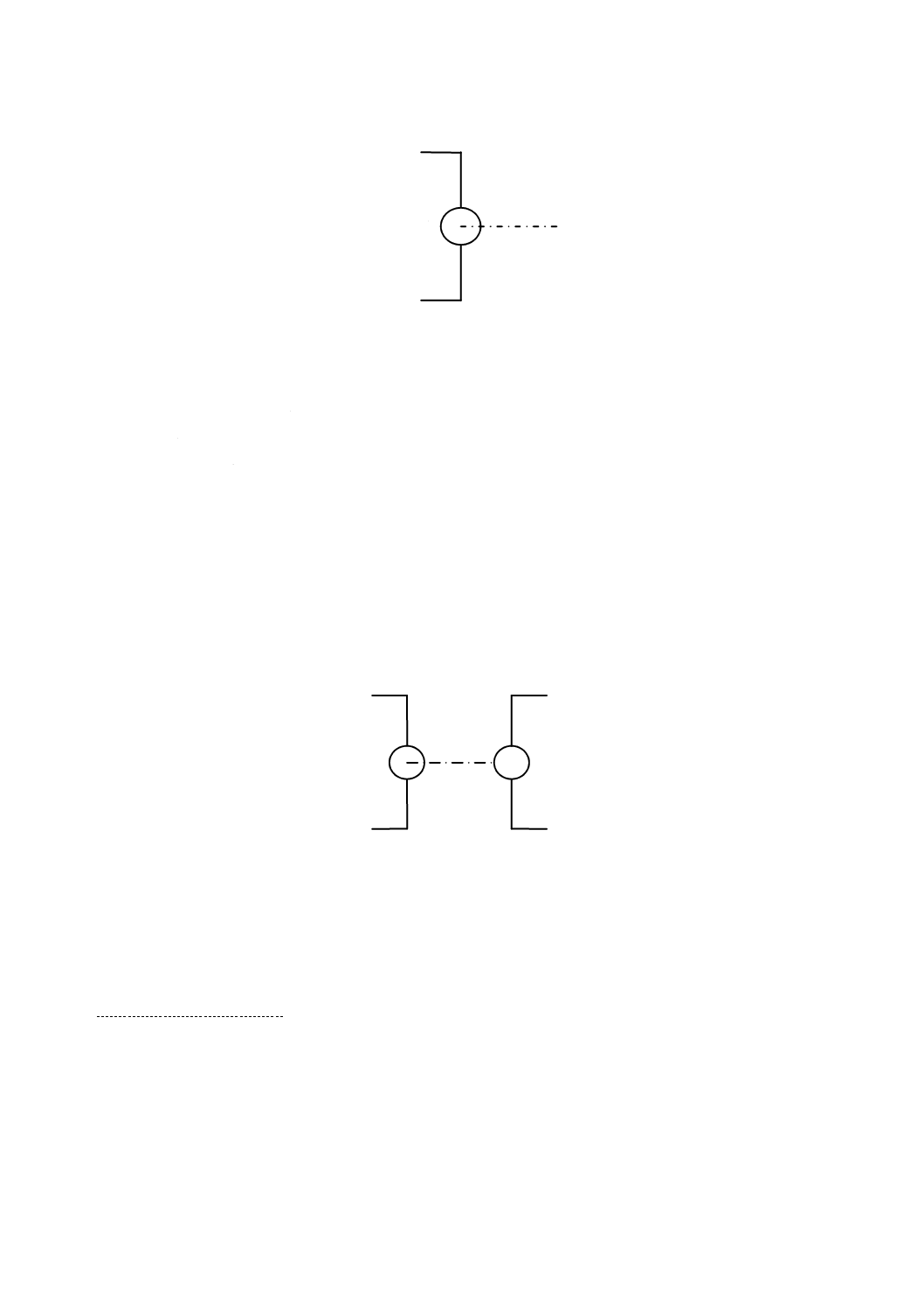
6.3.1.1
一般事項
トルク測定試験では,軸トルク及び速度の測定で電動機の機械的動力Pmechを求める。電力Pは,同じ
試験の中で測定する。
電動機の入力及び出力は,次による。
P1=Pel,P2=Pmech(図1参照)
一般に,各負荷点で短い時間内における全ての計測器の読取りを数回取得し,その結果を平均して,よ
り正確な試験値を得ることが望ましい。
11
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Pel,I
U
Pmech,T,n
図1−トルク測定試験の略図
6.3.1.2
トルクメータ試験
電動機をトルクメータを介して負荷機械に直結する。電動機を測定する負荷で運転し,U,I,Pel,n,T
及びθcを記録する。
6.3.1.3
動力計試験
電動機を動力計に直結する。動力計を,軸トルクが0.0のときに動力計の読取りが0.0になるように調整
する(5.5.4参照)。電動機を,測定する負荷で運転し,U,I,Pel,n,T及びθcを記録する。
6.3.2
別々の電源に接続する返還負荷法
6.3.2.1
一般事項
2台の同一の電動機を機械的に直結する(図2参照)。
試験は,電動機への電源は入れ替えるが,計測器及び計器用変成器は同じ電動機に付けたままで行う。
P1,IM
P2,IG
fM,UM
fG,UG
sM
sG
n
図2−別々の電源に接続する返還負荷法の略図
6.3.2.2
電動機の試験
駆動される側の電動機(発電機として運転する電動機)の端子を,MGセット又は低高調波ひずみのイ
ンバータに接続し,無効電力を供給するとともに有効電力を吸収する。駆動する側の電動機に定格電圧及
び定格周波数を供給する。駆動される側の電動機には,駆動する側の電動機より低い周波数を供給し,そ
の電圧は,電圧と周波数との比が一定となる値とする。
駆動する側の電動機と駆動される側の電動機とを入れ替えるため,電源の接続を逆にして,試験を繰り
返す。
各試験では,次を記録する。
− 駆動する側の電動機については,UM,IM,P1,fM及びsM
− 駆動される側の電動機については,UG,IG,P2,fG及びsG
Pel,I
Pmech,T,n
U
12
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− θc
6.3.2.3
同期機の試験
(同期機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
6.4
間接測定
6.4.1
全損失
6.4.1.1
同一の電源に接続する返還負荷法
(直流機,巻線形誘導機及び同期機に関する規定であり,適用範囲外のため,対応国際規格の規定を不
採用とした。)
6.4.1.2
ゼロ力率試験(同期機)
(同期機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
6.4.2
固定損
6.4.2.1
一般事項(直流機及び同期機)
(直流機及び同期機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
6.4.2.2
無負荷試験の条件
30分間隔で2回測定したときの無負荷入力の値の比が3 %以下の場合に,無負荷損は,安定したとみな
す。無負荷試験が負荷試験の後,直ちに行った場合も,無負荷損は,安定しているとみなす。
6.4.2.3
摩擦損,風損及び鉄損
少なくとも定格電圧を含む七つの電圧値で,次のとおり試験する。
− 定格電圧の125 %と60 %との間をおおむね等分した電圧で,四つ以上の値を読む。
− 定格電圧の50 %と約20 %,又は回転する機械と直結していない場合は,電流がそれ以上低下しない
点までとの間をおおむね等分した電圧で,三つ以上の値を読む。
試験は,電圧が減少する順番に読み取りながら,できるだけ迅速に行う。
各電圧値で,U0,I0,P0及びR0を記録する。
ここに,R0は,最低の電圧を読み取った後で抵抗値を測定して算定する。
直結した電動機の場合,P0は,T及びnから算定する。
注記 R0はRll0である。抵抗値が非常に小さく,抵抗値の測定が困難な場合は,算出値でもよい。
6.4.3
励磁回路損
(同期機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
6.4.4
負荷損
6.4.4.1
定格負荷温度試験
電動機は,適切な手段で負荷を加え,電動機の定格に従った電源で,温度上昇の勾配が毎時2 Kの熱平
衡となるまで運転する。
定格負荷試験の最後に,次を記録する。
− PN,IN,UN,s,f,θc及びθN
− RN=R(5.7.1による定格負荷試験抵抗値)
− θN(5.7.2に従った定格負荷での巻線温度)
漂遊負荷損を負荷試験から得るために測定する値については,6.4.5.3を参照。
6.4.4.2
負荷曲線試験
この試験は,主に電動機の漂遊負荷損の算定に適用できる。
この試験のデータの記録開始に先立ち,巻線温度は,定格負荷温度試験(6.4.4.1参照)での温度θNから

13
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
±5 K以内でなければならない。
電動機に,適切な手段で負荷を加える。
電動機に,六つの負荷点で負荷を加える。負荷点の四つは,25 %以上の負荷から100 %負荷までの間を
おおむね等分して選ぶことが望ましい。100 %負荷を超える残りの二つのおおむね等間隔の負荷点は,
150 %を超えない負荷から選ぶのがよい。電動機に負荷を加えるときは,最も大きい負荷値で開始し,最
も低い値に向けて降順に行う。これらの試験は,試験中の電動機の温度変化を最小にするため,できるだ
け迅速に行う。
全ての点の間での周波数のばらつきは,0.1 %未満でなければならない。巻線抵抗値Rの測定は,最大負
荷でのほかの特性を読み取る前,及び最小負荷でのほかの特性を読み取った後に行う。100 %以上の負荷
の場合は,最大負荷でのほかの特性を読み取る前に測定した巻線抵抗値Rとする。100 %未満の負荷の場
合は,最大負荷での巻線抵抗値R及び25 %負荷での巻線抵抗値Rを負荷に応じて線形に算定する。
巻線抵抗値Rは,固定子の巻線に測温素子を取り付けて,巻線温度を測定して求めてもよい。各負荷点
でのRは,各負荷点での巻線温度とRの温度特性とを用いて求める。
各負荷点で,U,I,P1,R,n,f及びTを記録する。
ここに,Rは,5.7.1による。
6.4.4.3
低減電圧での負荷試験
この試験は,全負荷で試験することができない大形電動機に適している。このような大形電動機には,
定格回転速度での負荷試験,低減した電圧Uredでの無負荷試験,並びに定格電圧及び定格周波数での無負
荷試験が必要となる。
この試験では,低減電圧の場合,速度が一定のとき,電流は電圧に比例して減少し,入力は電圧の二乗
に比例して減少するとみなす。
低減電圧で,Ured,Ired,P1red,I0red及びcosϕ 0redを記録する。
定格電圧で,UN,I0及びcosϕ 0を記録する。
6.4.4.4
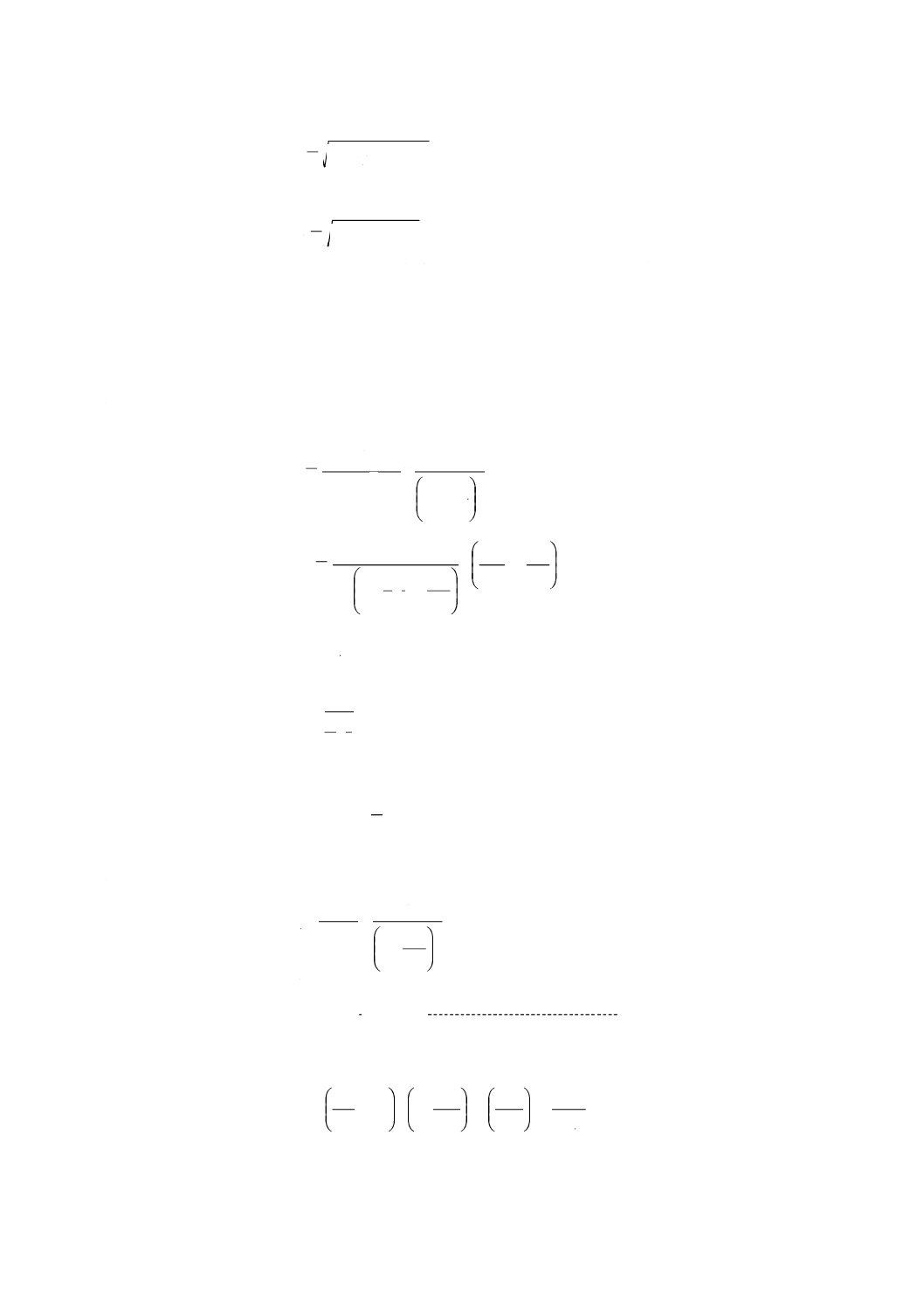
等価回路法
6.4.4.4.1
一般事項
この方法は,負荷試験が不可能なときに適用する。これは,励磁リアクタンスに並列の等価鉄損抵抗値
を含む,電動機のT形等価回路(図3参照)に基づく。回転子側のパラメータは,固定子側に換算し,例
えば,X'σrのように“ ' ”で示す。
Is
I′r
Rs
Xσs
X′σr
R′r s
U
Xm
Rfe
Zr(s)
図3−等価鉄損抵抗値をもつT形等価回路の電動機
この方法を電動機へ適用する場合には,次の設計値を用いる。
−
σr
σs
X
X
′
:固定子の漏れリアクタンスと固定子換算の回転子の漏れリアクタンスとの比。
14
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
− αr
:回転子巻線の温度係数(0 ℃での導電率)。
− Xσs,Xm :固定子の漏れリアクタンス及び励磁リアクタンス。
注記1 6.4.4.4及び8.2.2.4.3の等価回路法を用いるときは,全ての電圧,電流及びインピーダンスは,
星形接続の電動機の各相の値であり,電力及び無効電力は,各電動機全体での値である。
注記2 銅の場合は,αr=1/235。アルミニウムの場合は,αr=1/225。
注記3 このモデルのパラメータを得る方法は,8.2.2.4.3を参照。
6.4.4.4.2
低減周波数での回転子拘束試験
電動機の回転子を拘束し,定格電流を定格周波数の25 %の低周波まで供給・調整可能な三相周波数変換
装置から電力を供給する。インピーダンスの平均値は,固定子に対する回転子の相対位置から求める。
注記 低周波数の試験では,MGセット又は静止形変換器である周波数変換装置は,実用上正弦波の
出力電流を供給することが望ましい。
定格電流を供給し,定格周波数の25 %,及び定格周波数の25 %と50 %との間で三つ以上の合計四つ以
上の周波数に対して各値を読む。試験は短時間で行い,その間,固定子の巻線温度上昇は5 Kを超えない
ことが望ましい。
三つ以上の周波数で,U,I,f,P1,Rs,θc及びθwを記録する。
6.4.4.4.3
定格周波数での試験
インピーダンスの値は,次の試験からも求めることができる。
a) 定格周波数,低減電圧及び定格電流の回転子拘束試験から求めたリアクタンス。電圧,電流,入力,
周波数及び温度を記録する。
b) 回転子運転時の抵抗値 回転子運転時の抵抗値は,次による。
1) 定格周波数及び定格電圧を一定に保った低減負荷試験から求める。負荷点での電圧,入力,電流,
滑り及び温度を記録する。
2) 定格周波数及び定格電圧を一定に保った無負荷運転状態から回路を開放する試験で求める。電動機
が無負荷試験状態から電源開放した状態に移行した後,時間の関数として開回路電圧及び巻線温度
を記録する。
注記 この試験では,回転子電流の変化は比較的小さいと仮定する。
6.4.5
漂遊負荷損
6.4.5.1
同一の電源に接続する返還負荷法(直流機)
(直流機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
6.4.5.2
交流損(インバータ供給直流機)
(直流機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
6.4.5.3
トルクを測定する負荷試験
漂遊負荷損の算定については,5.5.4の要求事項を満たすトルク測定装置を6.4.4.2による負荷曲線試験に
追加して行う。
各負荷点で,トルクTを記録する。
6.4.5.4
回転子取外し及び逆回転試験
6.4.5.4.1
一般事項
この試験は,次の二つの試験を組み合わせて行う。
a) 基本周波数での漂遊負荷損の算定のための,回転子を取り外した試験。
b) 高周波数での損失の算定のための,外部の手段で駆動し,回転磁界と反対の方向に同期速度で電動機
15
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
を回転する試験。
各々の試験で,固定子には定格電流の25 %と100 %との間の四つの電流,並びに定格電流の150 %以上
及び100 %を超え150 %未満の等間隔の二つの電流に対する定格周波数の,平衡多相電流を供給する(回
転子)負荷電流ILを,次のように計算する。
2
0
2
s
L
I
I
I
−
=
ここに,
Is: 求める負荷電流を与える試験の間の固定子電流の値。
I0: 定格電圧での無負荷電流。
6.4.5.4.2
回転子取外し試験
この試験は,渦電流を誘導する可能性があるエンドシールド,軸受部品などの全ての部品を取り付けて
行う。負荷電流IL並びに各負荷電流で,“rm”を付けたP1,rm,IL,rm,Rrm及びθw,rmを記録する。
6.4.5.4.3
逆回転試験
この試験では,完全に組み立てた電動機を,容量が試験する電動機の定格全損失以上,かつ,定格損失
の5倍以下の駆動用電動機に直結する。軸動力の算定にトルクメータを使用する場合は,その最大トルク
は,電動機の定格全損失に相当するトルクの10倍以下とする。
通常の相順で給電するときの回転と逆の方向に,電動機を同期速度で駆動する。逆回転試験では,次の
事項を記録する。
a) 摩擦損が安定するまで固定子に電圧を加えず,I=0で駆動用電動機が供給するP0,rrを記録する。
b) 回転子取外し試験と等しい固定子電流値を得るように固定子に電圧を加える。全ての試験電流で,
“rr”を付けたIL,rr,Rrr,P1,rr及びθw,rrを電動機について,PD,rrを駆動用電動機について記録する。
注記 この試験の力率は低く,全ての電力計の読取りに対して相誤差補正が必要となる可能性がある。
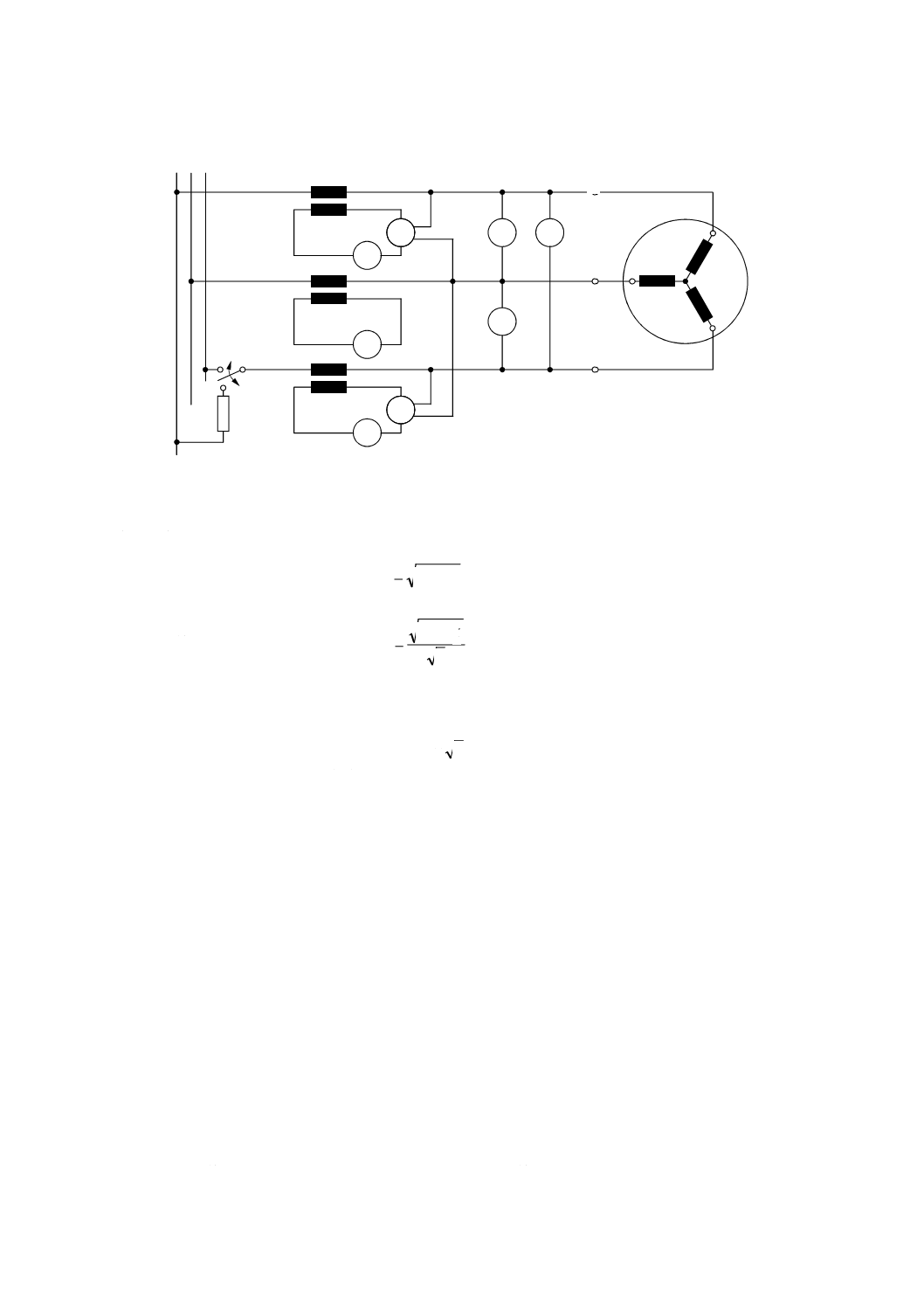
6.4.5.5
Eh星形試験
この試験では,負荷を直結していない電動機を,不平衡電圧で運転する。試験回路は,図4による。
三角結線が定格で,そのように接続している電動機は,この試験の間は星形結線に変更する。零相電流
を避けるため,星形結線の中性点は,系の中性点との接続を行ってはならない。また,星形結線の中性点
は,接地してはならない。
電動機の3番目の相は,おおむね次の代表値R'ehをもつ抵抗値Reh(図4参照)で電力線に接続する。
− 星形結線が定格の電動機の場合は,
0.2
3
N
N
eh
×
×
′
I
U
R=
− 三角結線が定格の電動機の場合は,
0.2
3
N
N
eh
×
×
′
I
U
R=
試験の間に使用する抵抗値Rehは,正相電流I(1) が逆相電流I(2) の30 %未満で,速度が定格回転速度近く
の代表的な電動機速度の範囲になるように,調整する(図4参照)。実際の抵抗値Rehが代表値R'ehから20 %
を超えない状態で試験を開始するのがよい。
16
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
L1
IU
L2 L3
IV
IW
1
2
S
Reh
PWV
PUV
W
A
A
W
A
UVW
UUV
UUW
V
V
V
V
U
W
ASM
図4−Eh星形試験回路
試験電流Itは,次による。
− 星形結線が定格の電動機の場合は,
2
0
2
N
t
I
I
I
−
=
− 三角結線が定格の電動機の場合は,
3
2
0
2
N
t
I
I
I
−
=
試験電圧Utは,次による。
− 星形結線が定格の電動機の場合は,
N
t
U
U=
− 三角結線が定格の電動機の場合は,
3
N
t
×
=U
U
試験に先立ち,6.4.2.2に従って無負荷の入力が安定していることを確認する。
試験全体の前後で,端子VとWとの間の抵抗値RVWを測定して,記録する。
三つの相が過度に不均一な熱をもたないように,試験は冷状態の電動機で行い,できるだけ迅速に実施
しなければならない。
大形の電動機は,抵抗値Rehなし(スイッチSを1の位置にする。図4参照),UNの25 %〜40 %の低減
電圧の状態でだけ始動できる。始動完了の後に,スイッチSを2の位置に切り替えて抵抗値Rehを接続す
る。
小形の電動機は,抵抗値Rehを接続した状態で始動するのがよい。この場合,切替えは必要ない。
六つの試験点で,供給電圧を変化させる。試験点は,V相で測定される相電流IVを定格相電流の150 %
と75 %との間をおおむね等分するように選ぶ。試験は,最大電流で開始し,最も低い電流へ降順に行う。
100 %以下の試験電流用の端子間抵抗値RVWは,試験の最後に最も低い電流を読み取った後に測定した
値とする。100 %を超える電流用に使用する抵抗値は,試験全体の前後の測定値を用いて,電流に線形な
関数として求める。試験抵抗値は,5.7.1に従った外挿を用いる。
各試験で,IU,IV,IW,UUV,UVW,UWU,PUV,PWV及びnを記録する。
この試験では,相抵抗値を平均化してはならない。
抵抗値は,巻線に取り付けた測温素子を用いて,固定子巻線温度を測定してもよい。各負荷点の抵抗値
17
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
は,試験開始前に測定した抵抗値及び温度を用いて,その点での巻線温度から求めてもよい。
一般に,積算形の電力計を用いる場合,内部の仮想の星形接続によって三相を対称化することがあるが,
この試験では,電源は意図的に非対称にする。したがって,星形接続点の接地及び仮想の星形がないこと
を必須とする。示した試験回路(図4参照)を厳格に適用することが望ましい。
正確な結果を得るために,滑りは,全ての電流に対して定格滑りの2倍を超えてはならない。つまり,n
>nsyn−2×(nsyn−nN) とする。この条件を満足しない場合は,抵抗値Rehを増加させて試験を繰り返す。電
動機が定格相電流の100 %以下の電流で不安定な運転を続けている場合は,それらの試験点は省くことが
望ましい。
6.4.5.6
短絡試験及び電動機を直結しない試験(同期機)
(同期機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
7
効率の算定(直流機)
(直流機に関する規定であり,適用範囲外のため,対応国際規格の規定は不採用とした。)
8
効率の算定
8.1
直接測定からの算定
8.1.1
トルク測定試験
6.3.1に従って試験した場合は,効率ηは,次の式を用いて算出する。
1
2
P
P
=
η
6.3.1.1に従い,入力P1及び出力P2は,次の式を用いて算出する。
el
1
P
P=
n
T
P
×
×
=π
2
2
ここで,Pel,T,nは6.3.1.2及び6.3.1.3による。
8.1.2
別々の電源に接続する返還負荷法
同一の電動機が同じ定格条件で運転する場合,効率ηは,全損失の半分及び駆動する側の電動機と駆動
される側の電動機との平均電力から,次の式を用いて算出する。
2
1
2
1
T
)/
+
(
−
P
P
P
=
η
ここに,
(
)
2
1
T
2
1
P
P
P
−
=
P1及びP2:6.3.2による。
8.2
間接測定からの算定
8.2.1
同一の電源に接続する返還負荷法からの全損失
(巻線形誘導機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
8.2.2
個々の損失の合計
8.2.2.1
効率
効率ηは,次の式を用いて算出する。
1
T
1
P
P
P−
=
η
18
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
ここに,
P1: 6.4.4.1に従った定格負荷試験からの入力
PT: 8.2.2.2による。
8.2.2.2
全損失
全損失PTは,固定損(8.2.2.3),負荷損(8.2.2.4)及び漂遊負荷損(8.2.2.5)の和(次の式参照)として
求める。
PT=Pk+Ps+Pr+PLL
8.2.2.3
固定損
8.2.2.3.1
一般事項
無負荷入力から無負荷試験の間の温度での無負荷巻線損を差し引いたものが,摩擦損,風損及び鉄損の
合計である固定損となる。6.4.2で記録される電圧の各値について,固定損を次の式を用いて算出する。
Pk=P0−Ps=Pfw+Pfe
ここに, Ps=1.5×
2
0I×Rll0(6.4.2.3参照)
8.2.2.3.2
摩擦損及び風損
8.2.2.3.1で算定した固定損の点のうち,目立って大きい飽和効果を示さないもの全てを用い,電圧の二
乗
2
0
Uに対する固定損Pkの曲線を作成する。ゼロ電圧への直線を外挿する。ゼロ電圧軸との交点が,摩擦
損及び風損Pfwとなる。
注記 摩擦損及び風損は,負荷に依存しないとみなし,同じ摩擦損及び風損の値を各負荷点に用いて
もよい。
8.2.2.3.3
鉄損
定格電圧の60 %と125 %との間の電圧値から,電圧U0に対するPfe=Pk−Pfwの曲線をプロットする。所
望の負荷点の鉄損は,一次巻線抵抗値の電圧降下を考慮した電圧Urの曲線から得られる。
2
2
r
sin
2
3
cos
2
3
×
×
×
×
ϕ
ϕ
R
I
R
I
U
U
+
−
=
ここに,
I
U
P
×
×
=
3
cos
1
ϕ
,
ϕ
ϕ
2
cos
1
sin
−
=
U,P1,I及びR:6.4.4.2による。
8.2.2.4
負荷損
8.2.2.4.1
負荷試験による負荷損の算定方法
8.2.2.4.1.1
一般事項
定格効率の算定のための負荷損は,6.4.4.1で測定したPNを用いる。
漂遊負荷損の算定のための負荷損は,6.4.4.2で測定したP1を用いる。
8.2.2.4.1.2
固定子巻線損及び温度補正
各負荷点での補正しない固定子巻線損は,次の式を用いて算出する。
Ps=1.5×I2×R
ここに, I及びR:6.4.4.2による。
全ての負荷点で補正した固定子巻線損は,定格負荷試験の固定子巻線抵抗値RNを用いて算定し,次の式
を用いて基準冷媒温度25 ℃に補正する。
Ps,θ=Ps×kθ
ここに, kθ:5.7.3による。
8.2.2.4.1.3
回転子巻線損及び温度補正
19
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
各負荷点において補正しない回転子巻線損は,次の式を用いて算出する。
Pr=(P1−Ps−Pfe)×s
f
n
p
s
×
−
=1
ここに,
Ps: 8.2.2.4.1.2による。
Pfe: 8.2.2.3.3による。
P1,n及びf: 6.4.4.2による。
全ての負荷点で補正した回転子巻線損は,基準冷媒温度25 ℃で補正した各点の滑り値,及び各点での
固定子巻線損の補正値(8.2.2.4.1.2参照)を次の式を用いて算出する。
Pr,θ=(P1−Ps,θ−Pfe)×sθ
ここに,
Ps,θ: 8.2.2.4.1.2による。
Pfe: 8.2.2.3.3による。
sθ=s×kθ: 基準冷媒温度25 ℃に補正した滑り値(5.7.3参照)
kθ: 5.7.3による。
8.2.2.4.1.4
ブラシの電気損(巻線形回転子)
(巻線形誘導機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
8.2.2.4.2
低減電圧での負荷試験による負荷損の算定方法
6.4.4.3の試験結果から,負荷時の電流及び定格電圧での入力を,次の式を用いて算出する。
0
red
N
red
I
U
U
I
I
∆
+
=
ここに, ∆
red
,0
red
N
red
,0
0
0
0
sin
sin
ϕ
ϕ
U
U
I
I
j
I
−
=−
P1=P1,red×
2
red
N
UU
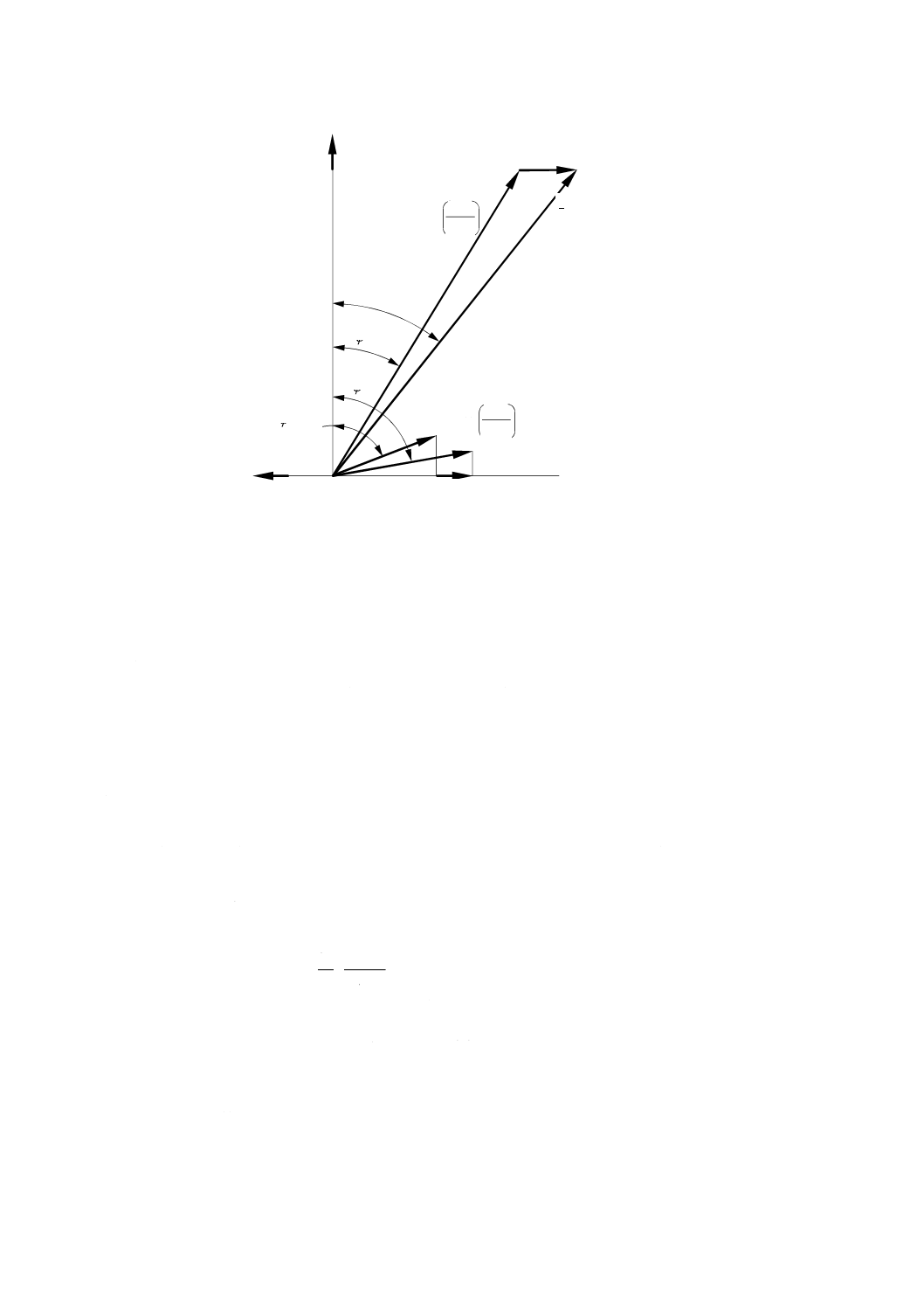
注記 下線を付した電流の記号は,ベクトルである(図5参照)。
このように算定した値I及びP1並びに低減電圧で測定した滑りを用いて,8.2.2.4.1と同様に負荷損を計
算できる。
20
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
∆I0
I0
∆I0
0,red
ϕ
UN
Ured
Ired
×
UN
Ured
I0,red ×
ϕ
ϕ 0
red
ϕ
Re
Im
+j
I
図5−低減電圧試験から電流ベクトルを得るためのベクトル線図
8.2.2.4.3
等価回路法による負荷損の算定方法
8.2.2.4.3.1
測定からの値
この方法は,T形等価回路(6.4.4.4及び図3参照)に基づく。
注記 等価回路法を用いるときは,全ての電圧,電流及びインピーダンスは,星形接続の電動機の各
相の値であり,電力及び無効電力は,電動機全体での値である。
この箇条で規定する手順は,6.4.4.4.2の方法に基づく。6.4.4.4.3の方法を用いる場合は,次の点に注意す
る。
a) リアクタンスは,8.2.2.4.3.2と同じ方法で計算する。
b) 回転子運転時の抵抗値は,次のように算定する。
− 6.4.4.4.3のb) 1) に規定の試験を使用 R'rにある値を仮定しながら,図3の等価回路を用いて,逆
計算する。計算した入力が測定した入力の0.1 %以内になるまで,又は計算した電流が測定した電
流の0.1 %以内になるまでR'rの値を調整する。
− 6.4.4.4.3のb) 2) に規定の試験を使用 減少していく電圧と開回路試験の時間との曲線の傾きから
時定数を算定する。R'rを次の式を用いて算出する。
0
σr
m
r
π
2
)
(
τ
f
X
X
R
′
′
+
=
ここに,
Xm: 励磁リアクタンス
X'σr: 固定子換算の回転子漏れリアクタンス
f: 電源周波数
τ0: 開回路時定数
R'rの値を,試験温度から,運転温度に補正する。
無効電力を算定する。
− 定格電圧U0=UN及び定格周波数での無負荷試験から(6.4.2.2参照)
+j
0, red
0
red
Ired
∆I0
∆I0
I0
I0, red
Ured
UN
21
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
2
0
2
0
ph
,0
Q,0
)
3(
P
I
U
P
−
=
− 低減周波数での回転子拘束試験から(6.4.4.4.2参照)
2
1
2
ph
Q,1r
)
3(
P
I
U
P
−
=
ここに, U0,ph,I0及びP0: 定格端子電圧における無負荷試験からの相電圧,相
電流及び入力。
U ph,I及びP1: 低減周波数での回転子拘束試験(6.4.4.4.2参照)か
らの相電圧,相電流及び入力。
8.2.2.4.3.2
等価回路パラメータ
等価回路パラメータは,次の手順で算定する。
a) リアクタンス 励磁リアクタンスX mを無負荷試験から,次の式を用いて計算し,定格周波数の25 %
での回転子拘束試験からXσs,lrを計算する。
2
m
σs
σs
2
0
Q,0
2
ph
,0
m
1
1
3
3
×
X
X
X
I
P
U
X
+
−
=
′
×
′
m
σs
σr
σs
m
σs
σr
σs
2
lr
Q,
lr
σs,
1
3
X
X
X
X
X
X
X
X
I
P
X
+
+
+
=
lr
σs,
lr
N
σs
X
f
f
X=
σr
σs
σs
σr
X
X
X
X
′
′=
開始値として,次の設計値を用いて計算する(6.4.4.4.1参照)。
Xσs,Xm及び
σr
σs
X
X
′
Xm及びXσsが,前の手順の値から0.1 %未満の偏差になるまで再計算する。
b) 鉄損抵抗値 定格電圧での鉄損に等価な一相の抵抗値を,次の式を用いて算出する。
2
m
σs
fe
2
ph
N,
fe
1
1
3
×
X
X
P
U
R
+
=
ここに,
Pfe: 定格電圧でのP0からの8.2.2.3.3による鉄損である。
UN,ph: 定格電圧における相電圧値
c) 回転子抵抗値 回転子を拘束した各インピーダンス試験点について,補正しない回転子抵抗値を,次
の式を用いて算出する。
fe
2
lr
σs,
2
σs
σr
2
m
σr
s
2
1
lr,r
1
3
R
X
X
X
X
X
R
I
P
R
×
′
′
×
×
′
−
−
=
ここに, Rs: 対応する温度θwでの一相の固定子巻線抵抗値
22
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注記 回転子巻線温度が固定子巻線温度と大きく異なる場合は,この方法は不正確になる。
回転子拘束試験の各周波数における基準巻線温度(5.7.2及び表2参照)に補正された回転子抵抗値
は,次の式を用いて算出する。
w
r
ref
r
lr
r,
lr
r,
1
1
θ
α
θ
α
+
+
=
×
′
′′
R
R
周波数flrに対する
lr
r,
R′′値の曲線をプロットする。flr=0との交点が,固定子に換算した回転子抵抗値
R'rとなる。
Is
Rs
Xσs
Rg(s)
Xg(s)
U
図6−計算用簡略モデル
d) 負荷に依存するインピーダンス 所望の各中間負荷点に対して,次の式を用いて,滑りに依存するイ
ンピーダンス及びアドミタンス値を算出する(図6参照)。
2
σr
2
r
r
X
s
R
Z
+
=
′
2
m
2
r
σr
2
fe
2
r
r
g
1
1
/
′
′
X
Z
X
R
Z
s
R
Y
+
+
+
=
2
g
fe
2
r
r
g
1
/
Y
R
Z
s
R
R
+
=
′
2
g
m
2
r
σr
g
1
Y
X
Z
X
X
+
=
′
端子から見たインピーダンスを,次の式を用いて算出する。
R=Rs+Rg,X=Xσs+Xg,Z=
2
2X
R+
ここに,
s: 推定の滑り
Rs: 基準巻線温度θrefでの一相の固定子巻線抵抗値
8.2.2.4.3.3
電流及び損失
性能値は,次の手順で算出する。
a) 固定子相電流
Z
U
I
N
s=
,回転子相電流
r
g
s
r
1
Z
Y
I
I=
′
,
回転子に伝達される電力
s
R
I
P
r
2
r
δ3
′
′
=
,鉄損
fe
2
g
2
s
fe
1
3
R
Y
I
P=
,
23
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
固定子及び回転子巻線損,
s
2
s
s3R
I
P=
,
r
2
r
r3
R
I
P
′
′
=
を算定し,8.2.2.5.2,8.2.2.5.3又は8.2.2.5.4のいずれかの方法に基づいて求めた定格負荷での値PLL,N
から,漂遊負荷損PLLを,次の式を用いて算出する。
漂遊負荷損
2
N
r,
r
N
LL,
LL
′′
I
I
P
P=
全損失は,次のようになる。
PT=Ps+Pfe+Pr+PLL+Pfw
b) 入力は
R
I
P
2
s
13
=
,及び軸動力はP2=P1−PTで表されるので,滑りを補正し,電流及び損失の計算を,
P2が所望の値に十分近くなるまで繰り返す。
電動機運転中の効率は,次の式を用いて算出する。
1
2
P
P
=
η
8.2.2.5
漂遊負荷損
8.2.2.5.1
トルク測定を行う負荷試験による漂遊負荷損の算定方法
8.2.2.5.1.1
残留損PLr
残留損は,各負荷点に対して,入力から,出力,試験時抵抗値での固定子巻線損,鉄損,摩擦損及び風
損,並びに滑りの値に対応する回転子巻線損を差し引いて算定する。
PLr=P1−P2−Ps−Pr−Pfe−Pfw,P2=2π×T×n
ここに, P1,T及びn: 6.4.4.2による。
Ps: 8.2.2.4.1.2による。
Pr: 8.2.2.4.1.3による。
Pfe: 8.2.2.3.3による。
Pfw: 8.2.2.3.2による。
8.2.2.5.1.2
残留損データの平滑化
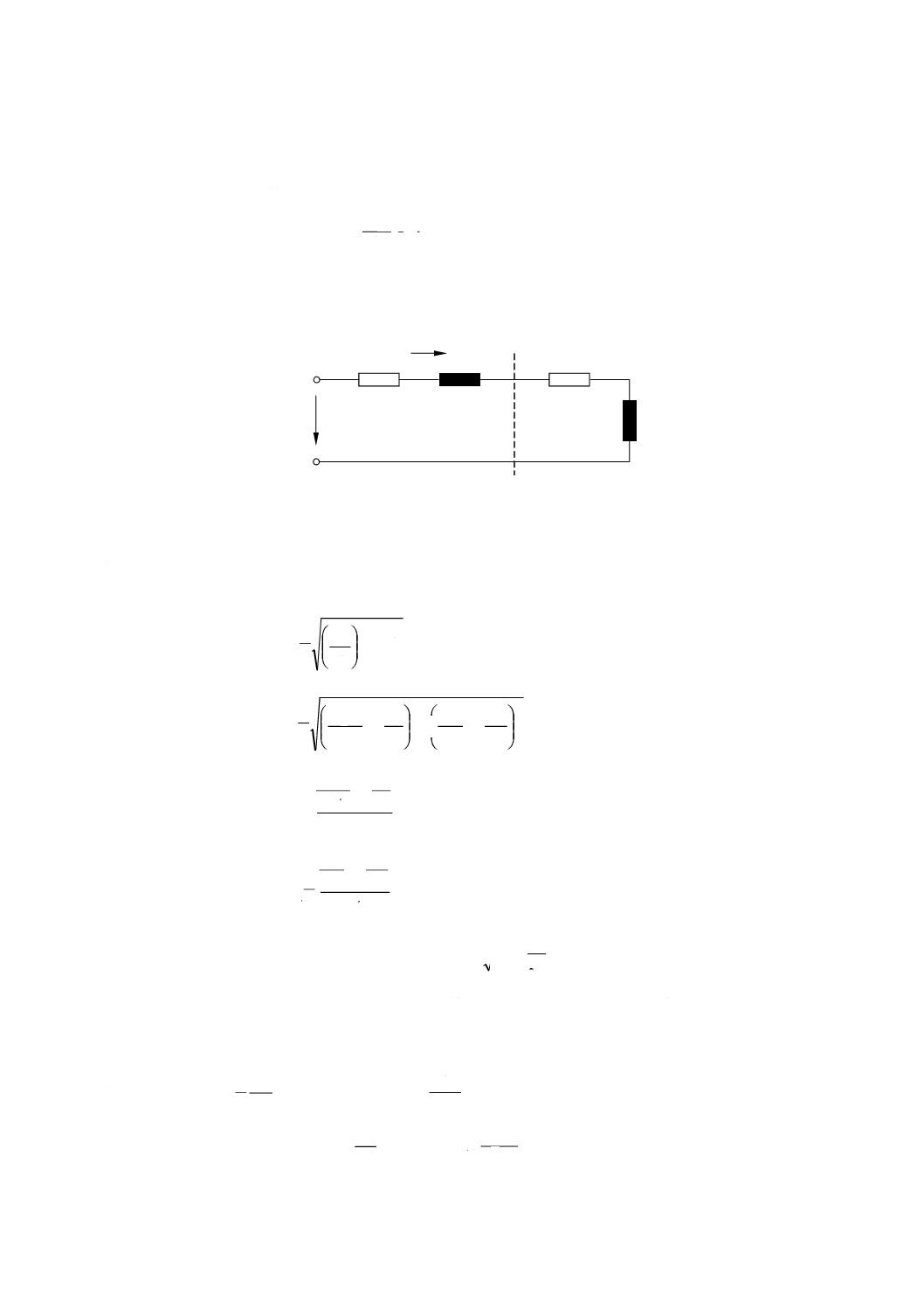
残留損のデータは,次の関係によって負荷トルクの二乗の関数として損失を表し,直線回帰分析(図7
参照)を用いて平滑化する。
PLr=A×T2+B
ここに,
T: 8.2.2.5.1.1による。
A及びB: 少なくとも六つの負荷点で,次の式を用いて6.4.4.2及び
8.2.2.5.1.1に従い求めた定数である。
2
2
2
2
2
L
2
L
)
(
−
)
(
−
)]
(
)
[(
=
T
T
i
T
P
T
P
i
A
Σ
Σ
×
Σ
×
Σ
×
Σ
×
によって求まる傾き。
i
T
A
i
P
B
2
L
Σ
×
Σ
−
=
によって求まる回帰曲線との切片。
i: 負荷点の総合計数。
24
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
PLr = AT 2 + B
PLL = AT 2
(傾き= A)
B
測定値(負荷点)
T 2
PLr
PLL
図7−残留損データの平滑化
相関係数γ は,次の式を用いて算出する。
]
)
(
−
[
]
)
(
−
)
(
[
)
(
)
(
−
)
(
=
2
L
2
L
2
2
2
2
2
L
2
L
P
P
i
T
T
i
T
P
T
P
I
Σ
Σ
×
×
Σ
Σ
×
Σ
×
Σ
×
Σ
×
γ
相関係数γ が0.95未満の場合は,最も直線から外れている1点を削除して再度回帰分析を行う。γ が0.95
以上になった場合は,この2回目の回帰分析結果を用いる。γ が0.95未満のままの場合は,この試験は無
効であり,計測器の誤差若しくは試験の読取りの誤差,又はその両方の誤差が考えられる。誤差の原因を
調べて改善し,試験(6.4.4.2参照)を再度実施する必要がある。
8.2.2.5.1.3
漂遊負荷損PLL
傾き定数Aが定まった場合,各負荷点での漂遊負荷損の値を,次の式を用いて算定する。
PLL=A×T2
ここに,
A及びT: 8.2.2.5.1.2による。
8.2.2.5.2
回転子取外し試験及び逆回転試験による漂遊負荷損の算定方法
固定子入力Pl,rm及びPl,rr,並びに軸動力(PD,rr−P0,rr)の試験値(6.4.5.4参照)を,入力,出力及び電流
の対数に回帰分析を適用して平滑化し,次の関係を得る。
rm
L,
N1
rm
rm
l,
B
I
A
P
+
=
×
,
rr
L,
N2
rr
rr
l,
B
I
A
P
+
=
×
,
rr
D,
N3
rr
D,
rr
0,
rr
D,
B
I
A
P
P
+
=
)
−
(
×
平滑化された入力及び出力は,次のようになる。
N1
rm
rm
l,
I
A
P
×
=
,
N2
rr
rr
l,
I
A
P
×
=
,
N3
rr
D,
rr
0,
rr
D,
I
A
P
P
×
=
)
−
(
データが正確な場合,各曲線は出力と電流との間で二乗則に近い関係を示す。
漂遊負荷損PLLは,次の式による。
PLL=PLL,rm+PLL,rr
PLL,rm=Pl,rm−(3×I 2×Rs,rm)
PLL,rr=(PD,rr−P0,rr)−[Pl,rr−PLL,rr−(3×I 2×Rs,rr)]
ここに,
PLL,rm: 基本周波数損失 各試験電流に対して算出する。
PLL,rr: 高周波数損失 各試験電流に対して算出する。
Rs,rm: 平均温度θ w,rmを基準とする固定子相抵抗値
PLr
PLL
PLr=AT 2+B
測定値(負荷点)
PLL=AT 2
(傾き=A)
B
T 2
25
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
Rs,rr: 平均温度θ w,rrを基準とする固定子相抵抗値
指定の運転点での漂遊負荷損は,次の手順で算定できる。
a) 固定子線電流の定格値に対応する負荷電流の近似値INLを計算する。
INL=
2
0
2
N
I
I−
ここに,
IN: 固定子線電流の定格値
I0: 無負荷固定子電流の値
b) 負荷電流INLの値について,漂遊負荷損の定格値PNLLを計算する。
)
−
(
−
−
+
=
srr
srm
2
NL
N2
NL
rr
N1
NL
rm
N3
NL
Drr
NLL
5.0
6
2
R
R
I
I
A
I
A
I
A
P
×
×
×
×
c) 全ての運転点での,負荷電流の値ILを計算する。
IL=
2
0
2I
I−
ここに,
I: 運転点での固定子線電流
d) 運転点での漂遊負荷損PLLを計算する。
2
NL
L
NLL
LL
×II
P
P=
8.2.2.5.3
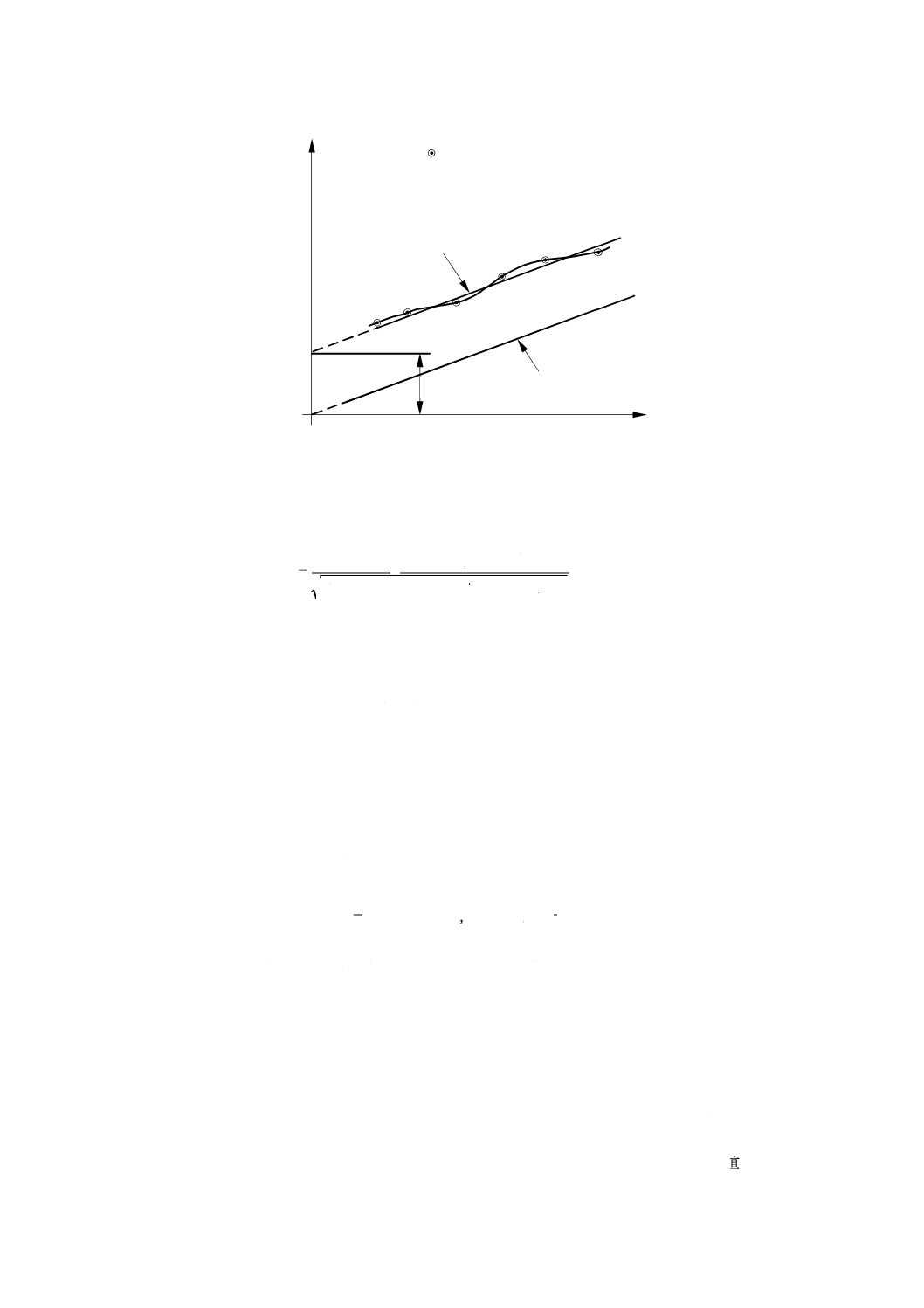
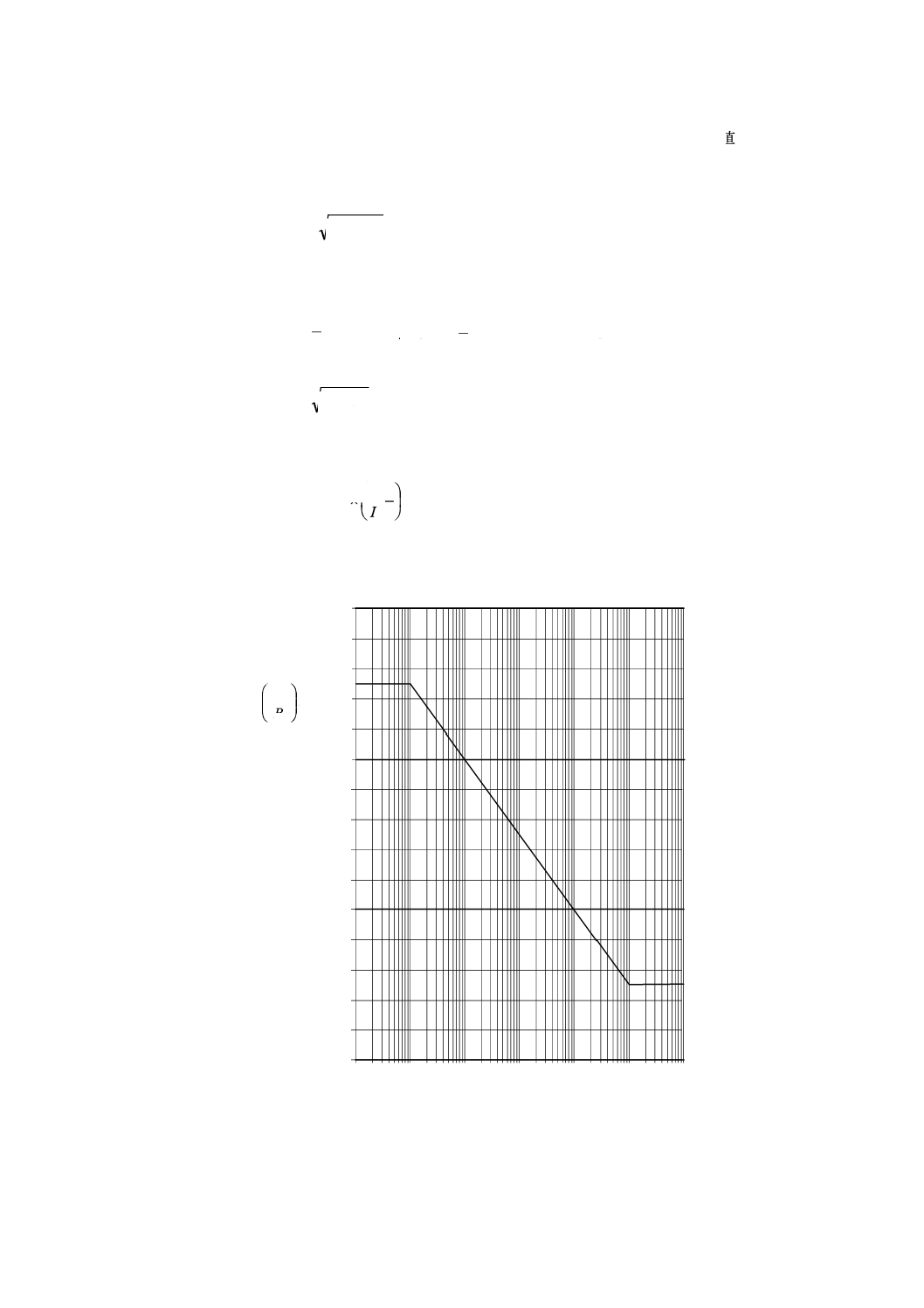
規定する許容値による漂遊負荷損の決定方法
定格負荷での漂遊負荷損の値PLLは,図8の曲線を用いて入力P1の百分率として決定してもよい。
定格出力 P2(kW)
PLL
P1
× 100
3
2
1
0
0,1
1
10
100
1 000
10 000
100 000
入力に対する
漂遊負荷損の比率%
図8−定められた許容値による漂遊負荷損
100
1
LL×
P
P
3
2
1
0
0.1
1
10
100
1 000
10 000 100 000
26
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図8の曲線の値は,次の式によって表すことができる。
P2≦1 kWのとき
PLL=P1×0.025
1 kW<P2<10 000 kWのとき
PLL=P1×
c
2
10
log
005
.0
025
.0
P
P
−
ここに,
Pc: 1(kW)
P2≧10 000 kWのとき
PLL=P1×0.005
定格負荷以外の場合,漂遊負荷損は,一次電流の二乗から無負荷電流の二乗を差し引いた値に比例して
変化する。
注記1 この曲線は平均を表さず,多くの測定値の上側の包絡線を表し,ほとんどの場合に8.2.2.5.1
又は8.2.2.5.2より大きい漂遊負荷損を与える可能性がある。
注記2 P2(kW)を無次元化するため,1(kW)で除している。
8.2.2.5.4
Eh星形試験による漂遊負荷損の算定方法
8.2.2.5.4.1
中間値の算定
6.4.5.5による各試験点に対して,附属書Bの式を用いて値を計算する。
8.2.2.5.4.2
漂遊負荷損のデータの平滑化
漂遊負荷損のデータは,直線回帰分析(図7参照)を用いて平滑化する。
損失は,6.4.5.5によって,試験電流Itに相関がある逆相電流Ii (2) の二乗の関数として表す。
B
I
I
A
P
+
=
2
t
)2(i
Lr
×
A及びBは,8.2.2.5.1.2に規定の手順と同様に計算する。
傾き定数Aが定まった場合,定格負荷に対する漂遊負荷損の値は,式PLL=A×T2を用いて算定する。
9
効率の算定(同期機)
(同期機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
27
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書A
(規定)
動力計のトルクの読取りの補正
A.1 電動機を無負荷で運転する試験での補正
A.1.1 動力計を電動機に直結した場合
動力計を電源から切り離して直結し,定格電圧及び定格周波数で電動機を運転する。
Pd,0,Id,0,n,Td,0及びRd,0を測定して,記録する。試験測定から得たRがある場合は,温度θwも測定し
て記録する。
滑り(s)及び次の値を算定する。
0
d
2
0
d
0
d
2
d
1.5
)
(
,
,
,=
=
R
I
R
I
P
×
×
A.1.2 動力計を電動機に直結しない場合
動力計との直結を切り,定格電圧及び定格周波数で電動機を運転する。
P0,I0及びR0を測定して,記録する。試験測定から得たRがある場合は,温度θwも測定して記録する。
次の値を算定する。
0
2
0
0
2
s
1.5
)
(
R
I
R
I
P
×
×
=
=
A.1.3 動力計のトルク補正
動力計のトルク補正Tcを,ニュートンメートル(N・m)単位で,次のように算定する。
0,d
fe
s
0
fe
d
0,d
c
π
2
)
(
)
(1
)
(
T
n
P
P
P
s
P
P
P
T
−
−
−
−
−
−
−
=
×
ここに, n,Pd,0,Pd,s及びTd,0: A.1.1による。
P0及びPs: A.1.2による。
Pfe: 8.2.2.3.3による。
注記 実用的には,Tdは動力計の校正でほとんど補正し,軸トルクが0.0のとき,動力計の読取りは
0.0である。
A.2 電動機を直結しない試験での補正
電動機の直結を切り,動力計の軸と直結する。外部冷却装置がある場合にはそれを付け,動力計を電動
機として運転する。動力計のトルク補正Tcは,各負荷点での負荷ありの速度nで測定したトルクに等しい。
この試験は,渦電流動力計のように,負荷装置が機械的負荷としてだけ動作する場合は,実施できない。
28
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書B
(規定)
Eh星形法の数値計算
試験結果から,次のような複素電圧及び電流を算定する。
UV
UVU
U=
UV
2
UV
2
WU
2
VW
WU
2U
U
U
U
U
×
′
−
−
=
2
WU
2
WU
WU
U
U
U
′
′′
−
=
U'VW=−UUV−U'WU
WU
VW
U
U
′′
′′=−
UV
W
WU
VW
UV
V
)
(
U
I
U
P
P
I
×
′
+
−
=−
注記 上の式で,電流IWは電圧UWUと同位相であると仮定する。抵抗器のインピーダンスが著しい
無効成分を含んでいる場合は,次の式を用いて算定する。
UV
2
W
eh
VW
UV
V
)
(
U
I
R
P
P
I
×
′
+
−
=−
ここに,
Reh: 抵抗成分の測定値
2
V
2
V
V
I
I
I
′
′′
−
=
)
(
2
1
2
V
2
U
2
W
2
V
l
I
I
I
I
k
−
−
=
×
×
)
(
2
V
2
V
2
V
2
U
2
1
V
1
U
I
I
I
I
k
I
k
I
−
−
+
=
′
×
′
×
′
V
V
U
2
V
1
U
I
I
I
I
k
I
′′
′
×
′
′′
−
=
I'W=−I'U−I'V
V
U
W
I
I
I
′′
′′
′′
−
=−
複素端子間電圧及び線電流から,内部端子間電圧を算定する。
)
(
2
U
V
VW
UV
iUV
I
I
R
U
U
−
+
=
×
)
(
2
V
W
VW
VW
iVW
I
I
R
U
U
−
+
=
×
)
(
2
W
U
VW
WU
iWU
I
I
R
U
U
−
+
=
×
正相及び逆相線間端子間成分(
3
2π
j
e
a=
)に分割する。
29
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
)
(
3
1
iWU
2
iVW
iUV
)1(
ill
U
a
U
a
U
U
×
+
×
+
×
=
)
(
3
1
iWU
iVW
2
iUV
)
2
(
ill
U
a
U
a
U
U
×
+
×
+
×
=
内部相電圧
i
Uの,正相及び逆相成分を算定する。
ill(1)
6
π
)1(i
3
1
U
e
U
j×
×
−
=
ill(2)
6
π
)
2
(i
3
1
U
e
U
j×
×
=
非対称内部相電圧を算定する。
i(2)
i(1)
iU
U
U
U
+
=
i(2)
i(1)
2
iV
U
a
U
a
U
×
+
×
=
i(2)
2
i(1)
iW
U
a
U
a
U
×
+
×
=
鉄損抵抗値を算定する。
fe
2
t
fe
P
U
R=
ここに, Ut: 6.4.5.5による。
Pfe: 8.2.2.3.3による。
fe
iU
feU
R
U
I=
fe
iV
feV
R
U
I=
fe
iW
feW
R
U
I =
内部相電流を算定する。
feU
U
iU
I
I
I
−
=
feV
V
iV
I
I
I
−
=
feW
W
iW
I
I
I
−
=
内部相電流の,正相及び逆相成分を算定する。
(
)
iW
2
iV
iU
i(1)
3
1
I
a
I
a
I
I
×
×
×
+
+
=
(
)
iW
iV
2
iU
i(2)
3
1
I
a
I
a
I
I
×
×
×
+
+
=
正確な結果を得るために,正相電流Ii (1) の絶対値は,逆相電流Ii (2) の絶対値の30 %未満でなければなら
ない。この条件を満足しない場合は,別のRehの値で試験を繰り返す。
電力を求める。
)
(
3
)1(i
)1(i
)1(i
)1(i
)1(δ
I
U
I
U
P
′′
×
′′
′
×
′
×
+
=
)
(
3
)2(i
)2(i
)2(i
)2(i
)2(δ
I
U
I
U
P
′′
×
′′
′
×
′
×
+
=
30
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
漂遊負荷損を算定する。
]
)
(
)
1
[(
fW
)2(δ
)1(δ
Lr
P
P
P
s
k
P
−
−
−
=
×
×
ここに,
2
i(2)
i(1)
)
(
1
1
I
I
k
+
=
31
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書C
(参考)
励磁回路の種類
(同期機に関する規定であり,適用範囲外のため,対応国際規格の規定を不採用とした。)
32
C 4034-2-1:2011
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書D
(規定)
ほかの試験方法
(対応国際規格では大形の電動機に関する試験方法を規定している。5.3の表1にあるとおり,不確かさ
が不明であるため,対応国際規格の内容を不採用とした。)
参考文献 JIS C 4034-30 回転電気機械−第30部:単一速度三相かご形誘導電動機の効率クラス(IEコ
ード)
33
C 4034-2-1:2011
3
3
C
4
0
3
4
-2
-1
:
2
0
11
3
3
C
4
0
3
4
-2
-1
:
2
0
11
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書JA
(参考)
JISと対応国際規格との対比表
JIS C 4034-2-1:2011 回転電気機械−第2-1部:単一速度三相かご形誘導電動機の損
失及び効率の算定方法
IEC 60034-2-1:2007,Rotating electrical machines−Part 2-1: Standard methods for
determining losses and efficiency from tests (excluding machines for traction vehicles)
(I)JISの規定
(II)
国際規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごとの評価
及びその内容
(V)JISと国際規格との
技術的差異の理由及び今
後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
1 適用範
囲
適用範囲
1
適用範囲
変更
IEC規格では直流機,同期機及び巻線形誘
導機も対象となっているが,JISではJIS C
4034-30に準拠する電動機を適用すること
とした。
JIS C 4034-30の損失及
び効率算定基準に整合化
するため,三相かご形誘
導電動機に限定した。
2 引用規
格
2
3 用語及
び定義
用語及び定義
3
JISに同じ。
削除
直流機,同期機及び巻線形誘導機だけで使
用される用語を削除。また,各用語内での
直流機,同期機及び巻線形誘導機だけに関
係する部分も削除。
同上
4 記号及
び略語
記号及び略語
4
JISに同じ。
削除
直流機,同期機及び巻線形誘導機だけに使
用される記号,添字を削除。
同上
5 基本要
求事項
5.3 算定方法ごとの
不確かさを規定し,
推奨される算定方
法を規定。
5.3
JISに同じ。
削除
直流機,同期機及び巻線形誘導機での推奨
される算定方法はJIS C 4034-30の適用範
囲外であり,削除した。
校正済み電動機試験,熱量測定法は不確か
さが“検討中”であり,JIS C 4034-30では
引用されないことから,削除した。
また,注記に5.2と同様の内容が記載され
ていたが,削除した。
不確かさが“検討中”の
試験については,対応国
際規格で正式に採用され
た場合は,JISを改正す
る。
34
C 4034-2-1:2011
3
4
C
4
0
3
4
-2
-1
:
2
0
11
3
4
C
4
0
3
4
-2
-1
:
2
0
11
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごとの評価
及びその内容
(V)JISと国際規格との
技術的差異の理由及び今
後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
5 基本要
求事項
(続き)
5.5.2 電気計器
5.5
5.5.2では,IEC 60034-1
の9.1に記載のルーチン
試験の場合,電気計器の
精度階級は0.5で十分で
あるとの注記が記載され
ている。
削除
IEC 60034-1の9.1のルーチン試験はこの
規格の適用範囲外であり,注記を削除し
た。
JIS C 4034-30の損失及
び効率算定基準に整合化
するために三相かご形誘
導電動機に限定してお
り,注記は不要である。
5.6 用いる単位につ
いて規定。
5.6
JISに同じ。
変更
IEC 60027-1の対応JISはないが,JIS Z
8203においてSI単位系を規定しているた
め,引用規格をIEC 60027-1からJIS Z 8203
に変更した。
−
5.7 用いる抵抗値に
ついて規定。
5.7
JISに同じ。
変更
直流機及び同期機の事項を削除。
基準巻線温度は日本の実態に合わせ,耐熱
クラス120(E),基準巻線温度75 ℃を追
加した。
耐熱クラス120(E)は,
日本では標準的に採用さ
れており,追加した。
6 効率の
算定のた
めの試験
方法
6.1 試験する電動機
の状態及び試験の
種類
6.1
JISに同じ。
削除
直流機及び同期機の事項を削除。
JIS C 4034-30の損失及
び効率算定基準に整合化
するため,三相かご形誘
導電動機に限定した。
6.2 励磁回路測定
6.2
励磁回路測定
削除
同期機の事項を削除。
同上
6.3 直接測定を行う
場合の試験方法
6.3
JISに同じ。
削除
直流機及び同期機の事項を削除。
同上
6.4 間接測定を行う
場合の試験方法
6.4
JISに同じ。
削除
直流機,巻線形誘導機及び同期機の事項を
削除。
同上
7 効率の
算定(直流
機)
7
直流機における効率の算
定方法
削除
直流機の項目につき削除。
同上
35
C 4034-2-1:2011
3
5
C
4
0
3
4
-2
-1
:
2
0
11
3
5
C
4
0
3
4
-2
-1
:
2
0
11
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
(I)JISの規定
(II)
国際規格
番号
(III)国際規格の規定
(IV)JISと国際規格との技術的差異の箇条ごとの評価
及びその内容
(V)JISと国際規格との
技術的差異の理由及び今
後の対策
箇条番号
及び題名
内容
箇条番号
内容
箇条ごと
の評価
技術的差異の内容
8 効率の
算定
8.1 直接測定での試
験方法からの効率
の算定
8.1
JISに同じ。
削除
誘導発電機の事項を削除。
JIS C 4034-30の損失及
び効率算定基準に整合化
するため,三相かご形誘
導電動機に限定した。
8.2 間接測定での試
験方法からの効率
の算定
8.2
JISに同じ。
削除
8.2.1 同一の電源に接続する返還負荷法か
らの全損失は巻線形誘導機の試験のため,
削除。
8.2.2.4.1.4 ブラシの電気損(巻線形回転子)
は巻線形誘導機の試験のため,削除。
同上
9 効率の
算定(同期
機)
9
同期機における効率の算
定方法
削除
同期機の項目につき削除。
同上
附属書C
(参考)
附属書C 励磁回路の種類
削除
同期機の項目につき削除。
JIS C 4034-30の損失及
び効率算定基準に整合化
するため,三相かご形誘
導電動機に限定した。
附属書D
(規定)
附属書D ほかの試験方法
削除
対応国際規格では大形の電動機に関する
試験方法を規定している。5.3の表1にあ
るとおり,不確かさが不明であり,JIS C
4034-30では用いることができないため,
削除した。
対応国際規格で正式に採
用された場合にはJISを
改正する。
JISと国際規格との対応の程度の全体評価:IEC 60034-2-1:2007,MOD
注記1 箇条ごとの評価欄の用語の意味は,次による。
− 削除……………… 国際規格の規定項目又は規定内容を削除している。
− 変更……………… 国際規格の規定内容を変更している。
注記2 JISと国際規格との対応の程度の全体評価欄の記号の意味は,次による。
− MOD…………… 国際規格を修正している。