
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
B 6572 : 1992
数値制御ルータ−試験及び検査方法
Numerically controlled routing machines−Test methods for performance and
accuracy
1. 適用範囲 この規格は,主軸の上下行程300mm以下,テーブルの大きさ1 500×3 000mm以下のテー
ブル,主軸の移動を数値制御によって行い,工作物を加工する木工フライス盤(以下,数値制御ルータと
いう。)の機能,運転性能及び剛性に関する試験方法,並びに機械精度及び工作精度検査方法について規定
する。
備考1. この規格の引用規格を,次に示す。
JIS B 6507 木材加工機械の安全通則
JIS B 6521 木材加工機械の騒音測定方法
JIS B 6603 ルータの構造の安全基準
2. この規格の中で,{ } を付けて示してある単位及び数値は,従来単位によるものであって,
参考として併記したものである。
2. 機能試験方法
2.1
数値制御によらない機能試験 数値制御によらない機能試験は,手動によって各部を操作して行い,
表1による。
表1 数値制御によらない機能試験
番号
試験項目
試験方法
1
電気装置
運転試験の前後に,各1回絶縁状態を試験する。ただし,半導体などを使用し
た回路には適用しない。
2
主軸の始動,停止及び運
転操作
適当な一つの主軸回転速度で正転及び逆転について,始動及び停止(制動を含
む。)を繰り返し10回行い,作動の円滑さ及び確実さを試験する。
3
主軸回転速度の変換操作
表示のすべての回転速度(1)について主軸回転速度を変換し,操作装置の作動の
円滑さ及び指示の確実さを試験する。
4
主軸選択操作
すべての主軸について,主軸選択装置の作動の円滑さ及び確実さを試験する。
5
テーブル及び主軸移動限
自動停止装置の操作
X軸方向,Y軸方向及びZ軸方向のそれぞれについて早送り移動限自動停止を
行い,作動の円滑さ及び確実さを試験する。
6
ルータビットの取付け及
び取外し
ルータビットの取付け,取外し及び締付ねじの確実さ及び円滑さを試験する。
7
数値制御装置
数値制御装置の各種表示灯,テープリーダ,ファンなどの作動の円滑さ及び確
実さを試験する。
8
安全装置
作業者に対する安全機能及び機械防護機能の確実さを試験する(JIS B 6507及び
JlS B 6603参照)。
9
潤滑装置
油密,油量の適性な配分など,機能の確実さを試験する。
10
油圧装置
油密,圧力調整など,機能の確実さを試験する。
2
B 6572 : 1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
試験項目
試験方法
11
空気圧装置
気密,圧力調整など,機能の確実さを試験する。
12
附属装置
機能の確実さを試験する。
注(1) 無段変速の場合は,最低,中間及び最高の三つの回転速度について行う。
備考 その機能をもたない装置制御ルータでは,表1中のこれに該当する試験項目を省略する。
2.2
数値制御による機能試験 数値制御による機能試験は,試験用数値制御テープ,その他の数値制御
指令(2)によって各部を作動させて行い,表2による。
注(2) その他の数値制御指令には,カード,オンライン,手動データ入力装置による入力及び操作盤
上での押ボタンなどの手動入力による数値制御指令を含む。
表2 数値制御による機能試験
番号
試験項目
試験方法
1
主軸の始動,停止及び運
転操作
適当な一つの主軸回転速度で正転及び逆転について,始動及び停止(制動を含
む。)を繰り返し10回行い,作動の円滑さ及び確実さを試験する。
2
主軸回転速度の変換操
作
表示のすべての回転速度(1)について主軸回転速度を変換し,操作装置の作動の
円滑さ及び指示の確実さを試験する。
3
主軸の始動,停止,逆転
及び主軸回転速度の変
換
主軸を回転し,始動,停止,逆転及び表示のすべての回転速度(1)について主軸
回転速度を変換し,機能の確実さ及び作動の円滑さを試験する。
4
送りの始動,停止及び送
り速度の変換
表示の最低,中間,最高の三つの送り速度及び早送りに送り速度を変換し,各
送りの正負について始動,停止を行い,機能の確実さ及び作動の円滑さを試験
する。この試験は,各制御軸について行う。
5
寸動
各制御軸について寸動操作を行い,機能の確実さ及び作動の円滑さを試験する。
6
原点復帰
各制御軸について,復帰可能な任意の位置から原点復帰(3)を行い,機能の確実
さ及び作動の円滑さを試験する。
7
主軸選択装置の操作
すべての主軸について,主軸選択装置の作動の円滑さ及び確実さを試験する。
8
テーブル及び主軸移動
限自動停止装置の操作
X軸方向,Y軸方向及びZ軸方向のそれぞれについて早送り移動限自動停止を
行い,作動の円滑さ及び確実さを試験する。
9
その他の機能
具備するその他の機能のそれぞれについて,機能の確実さ及び作動の円滑さを
試験する。
注(3) 移動は,原則として早送りとし,自動加減速を含めた距離以上とする。
備考1. 連続無負荷運転試験と同時に行ってもよい。
2. その機能をもたない数値制御ルータでは,表2中のこれに該当する試験項目を省略する。
3. 運転試験方法
3.1
無負荷運転試験 無負荷運転試験は,次による。
(1) 主軸関係 主軸を回転させ,30分程度運転を継続して軸受温度が安定した後,所要電力及び騒音を測
定し,表3の記録様式1-1に規定する各項について記録するとともに,異常振動がないことを感触に
よって観察する。
なお,騒音の測定は,JIS B 6521による。
3
B 6572 : 1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
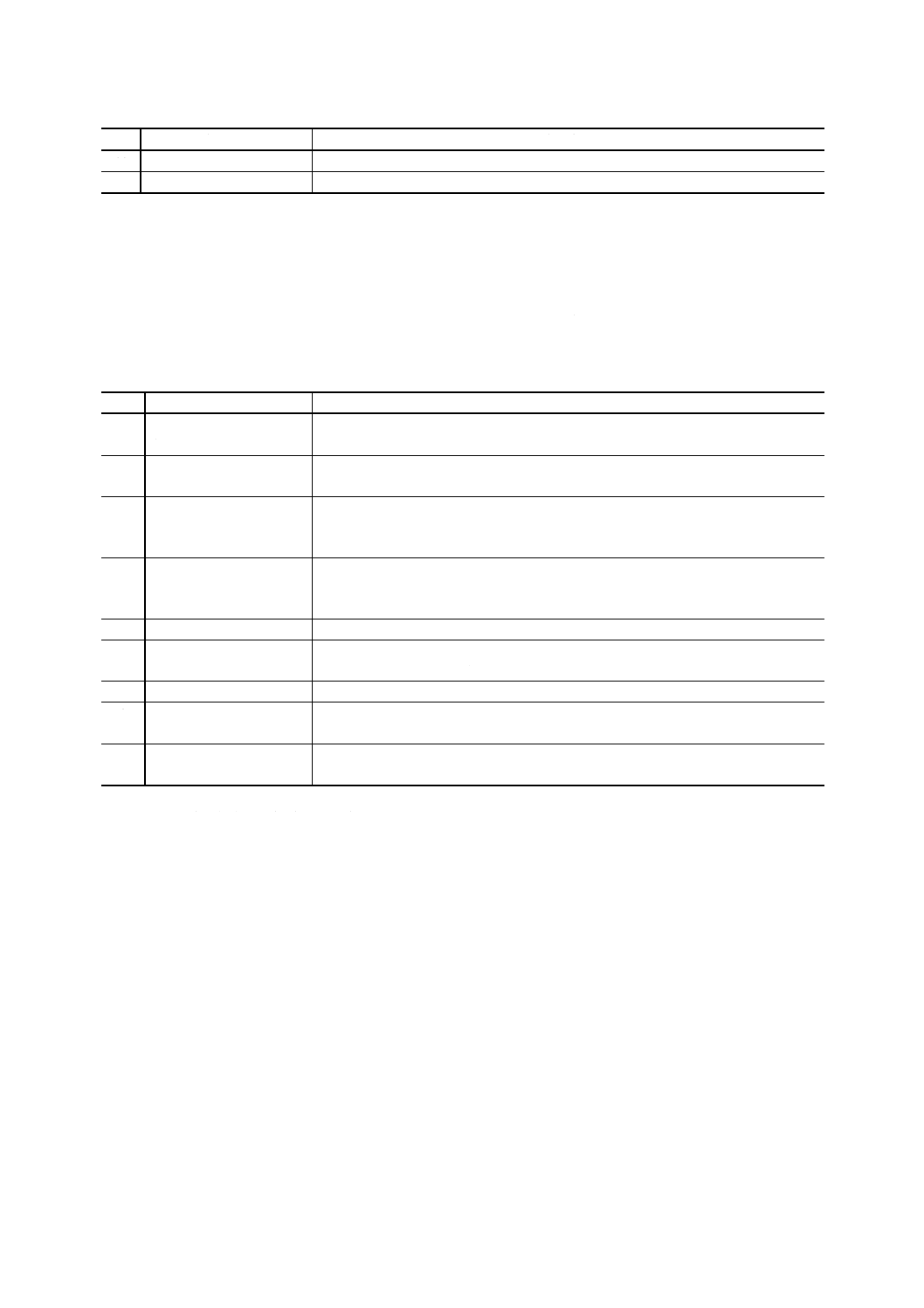
表3 記録様式1-1
備考1. 主軸回転速度の変速装置があるものは,最大回転速度を含む少なくとも2条件の回
転速度について記録する。
2. 騒音測定条件については,記事欄に記録する。
3. この測定及び観察は,すべての主軸について行う。
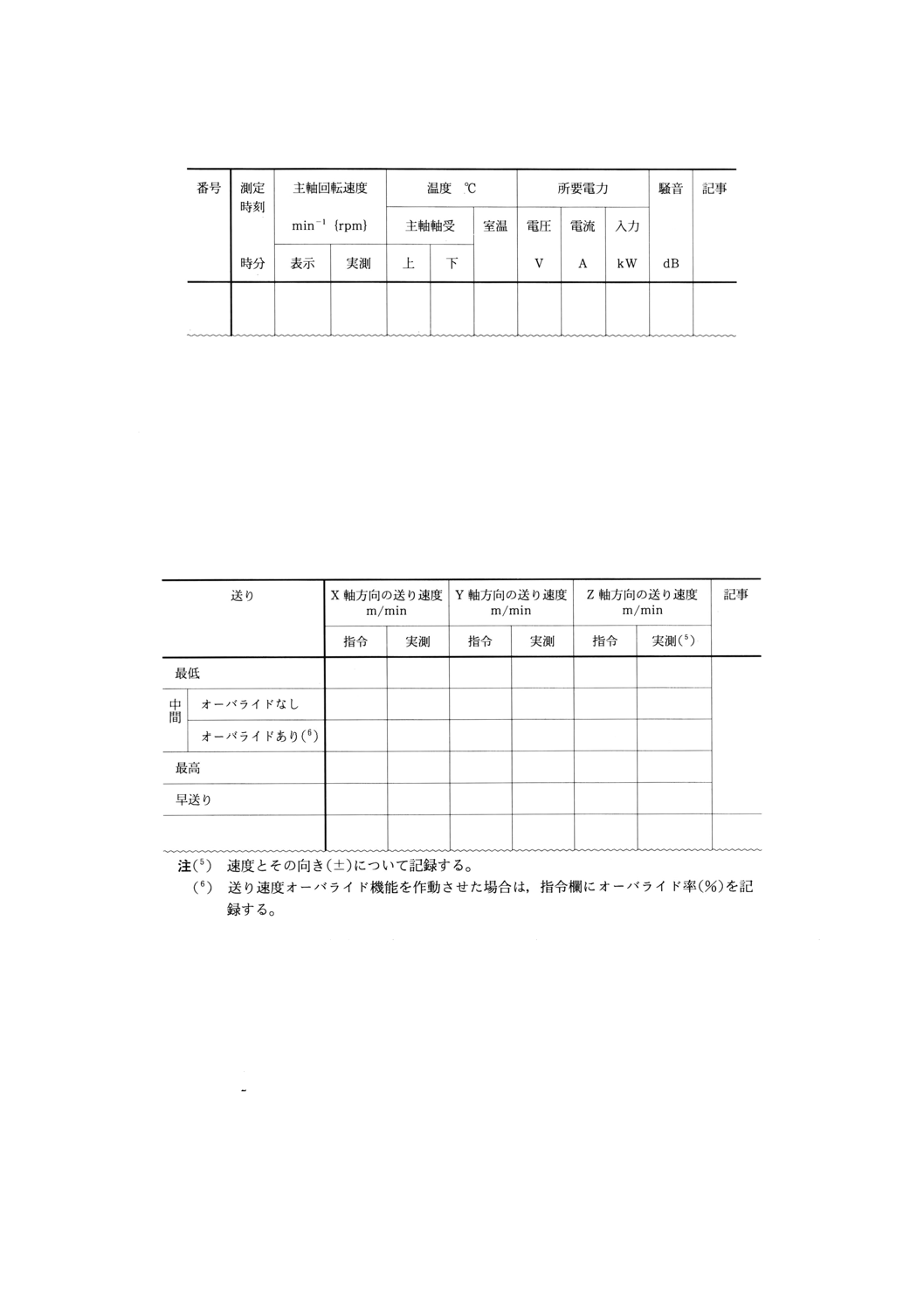
(2) 送り関係 最低(4),中間,最高の三つの送り速度及び早送りについて測定し,表4の記録様式1-2に
規定する各項について記録するとともに,異常振動がないことを感触によって観察する。
なお,中間の送り速度において,送り速度オーバライド機能を作動させて同様に測定を行う。
注(4) 最低送り速度は,1m/minとする。
表4 記録様式1-2
3.2
連続無負荷運転試験 連続無負荷運転試験は,各機能を含めた試験テープ,その他の数値制御指令
(2)によって,2時間程度(7)の連続運転を行い,異状の有無を試験する。
この場合の試験テープ,その他の数値制御司令には,少なくとも次の内容を含める。
(1) 表示の中間の主軸運転速度(8)についての正転,逆転,始動及び停止。
(2) 送り速度は,各軸とも表示の最低,中間,最高及び早送り,移動距離は,表示のほぼ全域とし,各軸
とも移動距離の21以上の早送り。
(3) 各軸とも移動距離のほぼ全域にわたる適切な位置での位置決め(9)。
4
B 6572 : 1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
注(7) 2サイクル以上の連続運転とする。
(8) 主軸回転速度の自動変換機能をもつものは,最低,中間及び最高を含む5種類以上の回転速度
を含める。
(9) 同時2軸以上の制御機能を具備するものは,これを含める。
備考1. テーブル上は,無負荷とする。
2. この測定は,すべての主軸について行う。
3.3
負荷運転試験 負荷運転試験は,切削動力試験及び びびり試験を行って,所要電力及び騒音を測
定する。
また,異常振動がないこと,及び切削面の状態を感触によって観察する。
切削動力試験は,高速切削において,所定の電力に耐えられることを試験し,びびり試験は,切削の安
定性を試験するもので,平面削りを行い,所要電力を測定し,びびりの状態を観察する(表5参照)。
なお,工具は,図1に示す超硬ルータビットとし,表6によって必要事項を記録する。
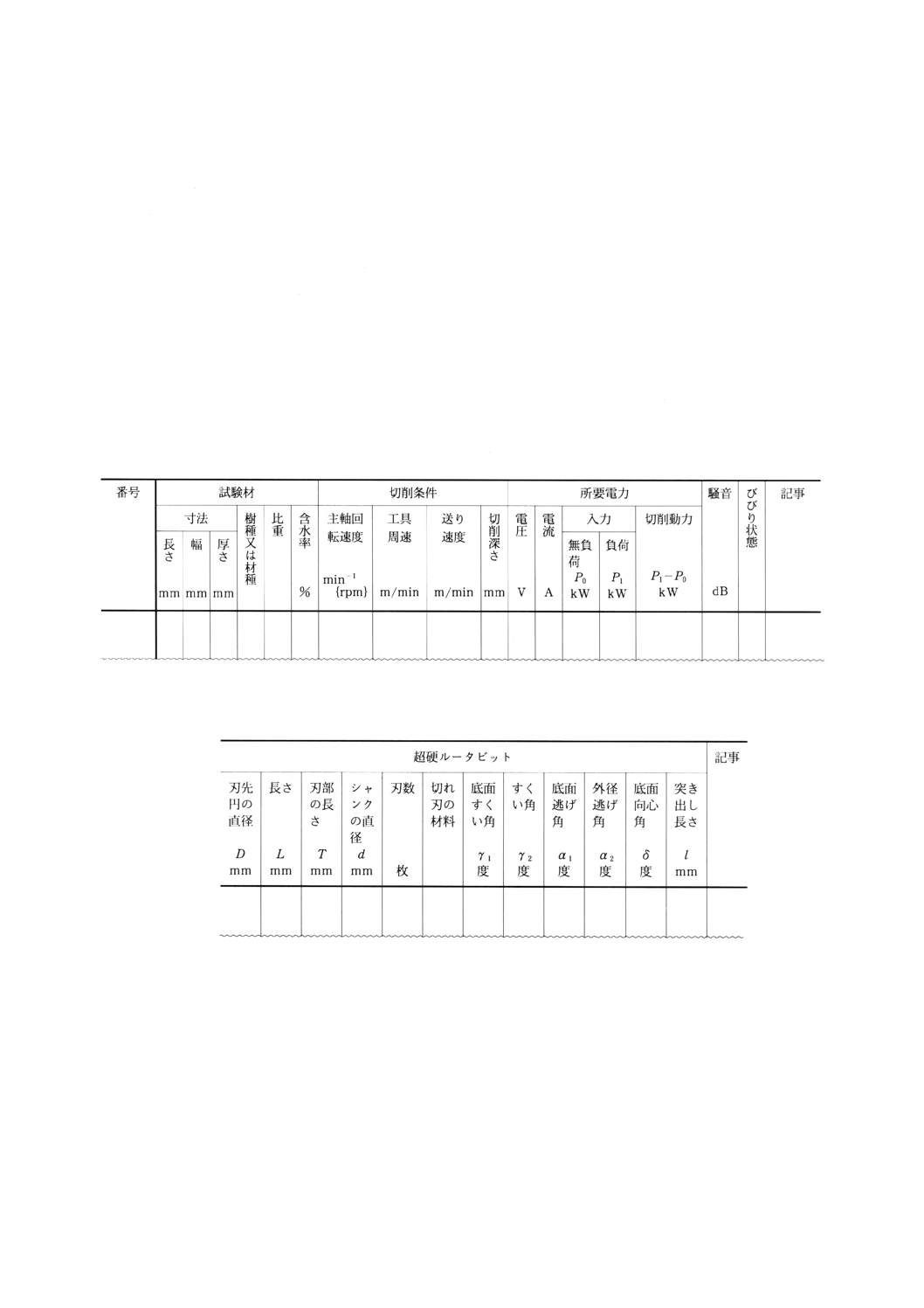
表5 記録様式2
備考1. 試験材の切削方向及び騒音測定条件については,記事欄に記録する。
2. この測定及び観察は,すべての主軸について行う。
表6 記録様式3
備考 工具刃角の寸法記号は,図1による。
5
B 6572 : 1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
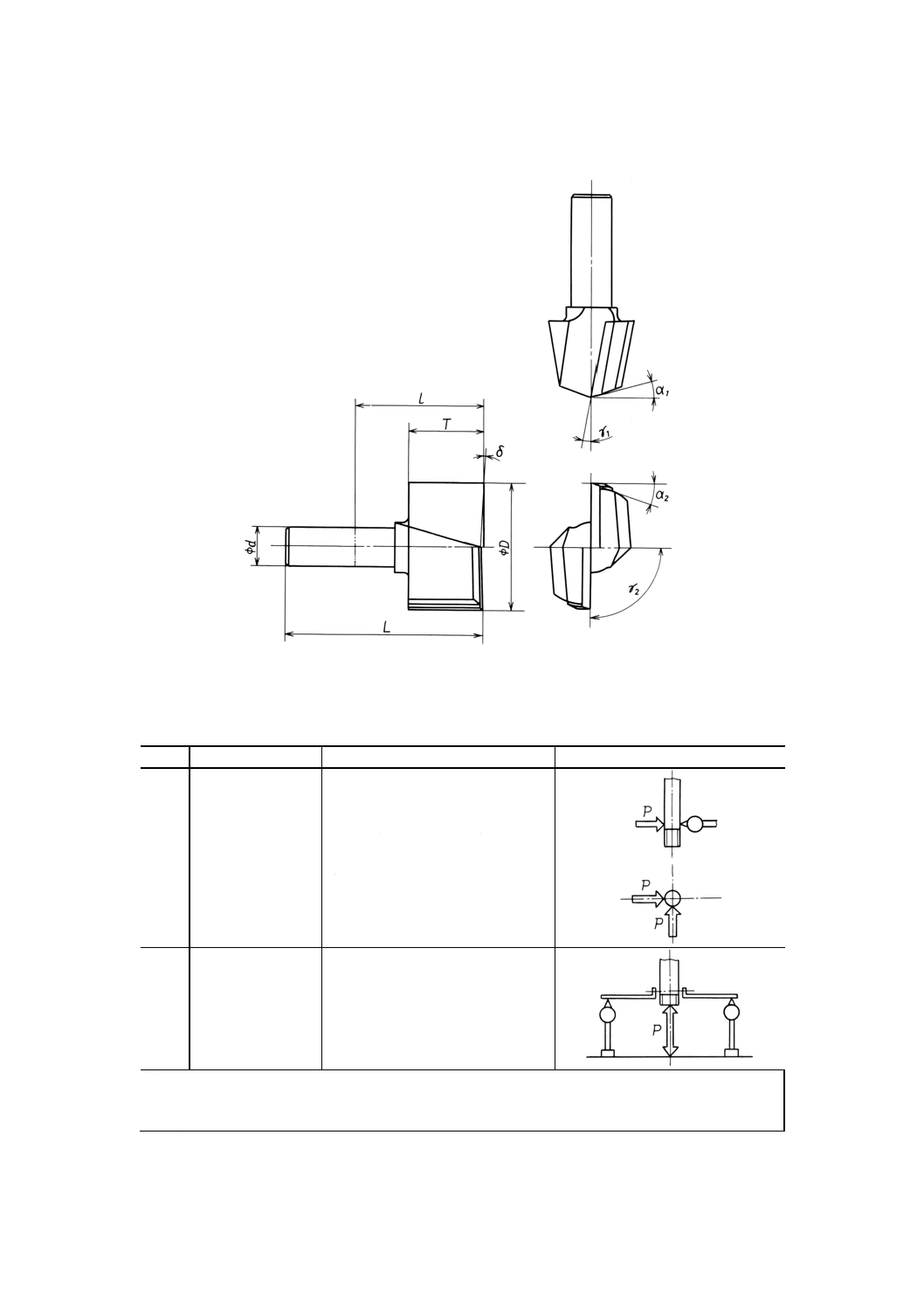
図1 工具刃角の寸法記号
4. 剛性試験方法 数値制御ルータの剛性試験は,表7による。
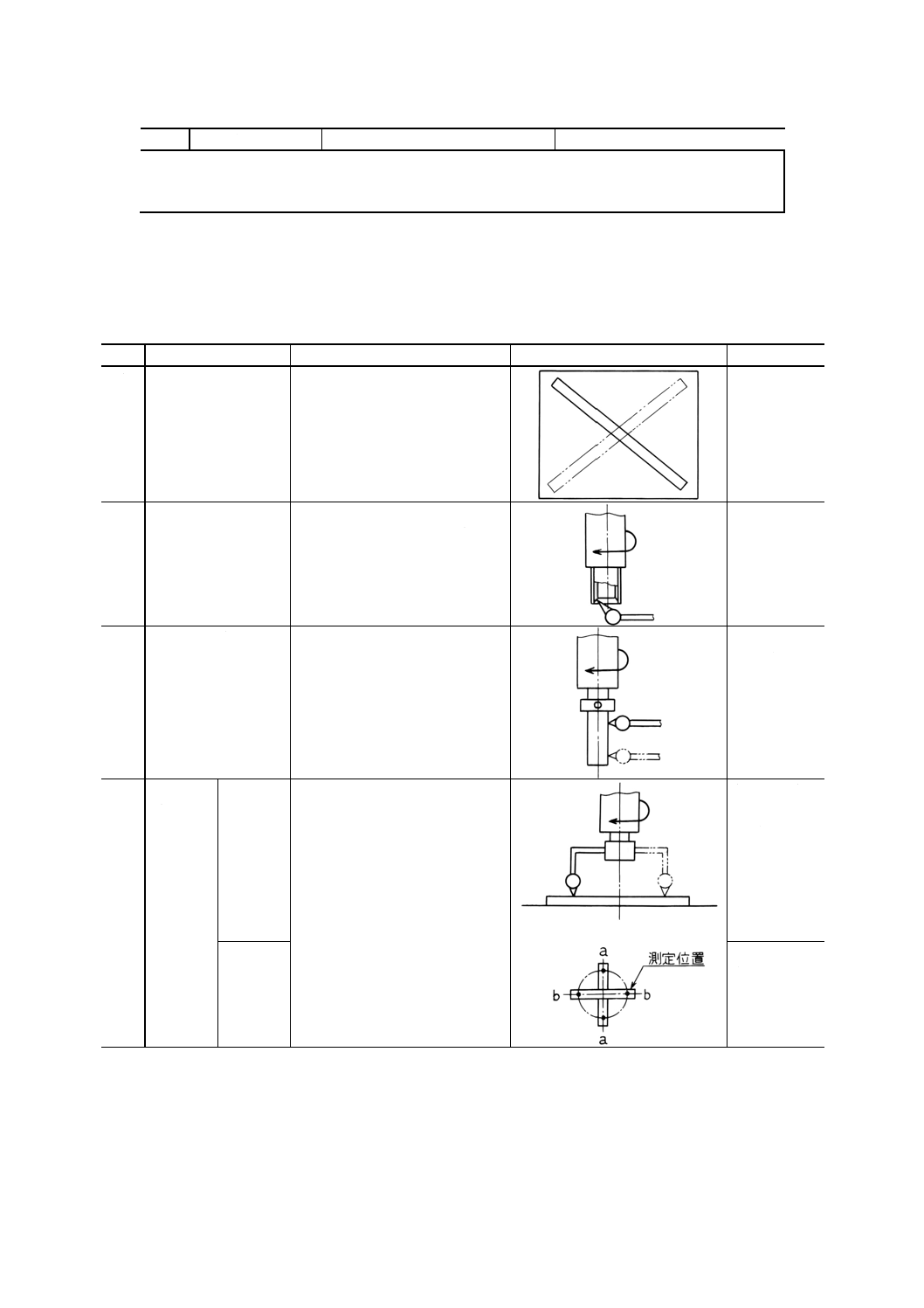
表7 剛性試験
番号
試験項目
測定方法
測定方法図
1
主軸系の曲げ剛性
定置したテストインジケータを主
軸の先端部(側面)に当てて,主軸
に直角方向の荷重 (P) を加えて
(10),主軸のたわみを測定する。
この測定は,互いに90°をなす2
方向について荷重を加えて行う。
2
主軸とテーブルの
総合剛性
主軸(11)とテーブル(12)との間に,垂
直方向の荷重 (P) を加えたときの
主軸とテーブルとの間の相対変位
を測定する。
この測定は,互いに90°をなす2
方向について行う。
注(10) 荷重を加える位置は,できるだけ主軸端に近い位置とし,主軸の固定端からの距離を記録する。
(11) 主軸頭又は主軸スリーブが上昇するものについては,その動きの中央に固定して測定を行う。
(12) テーブルが昇降するものについては,その動きの中央に固定して測定を行う。
6
B 6572 : 1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
番号
試験項目
測定方法
測定方法図
2. 荷重 (P) の大きさは,製造業者が推奨する値とし,その値を記録する。
3. この測定は,主軸を回転させ,軸受温度が安定した後に行う。
4. この測定は,すべての主軸について行う。
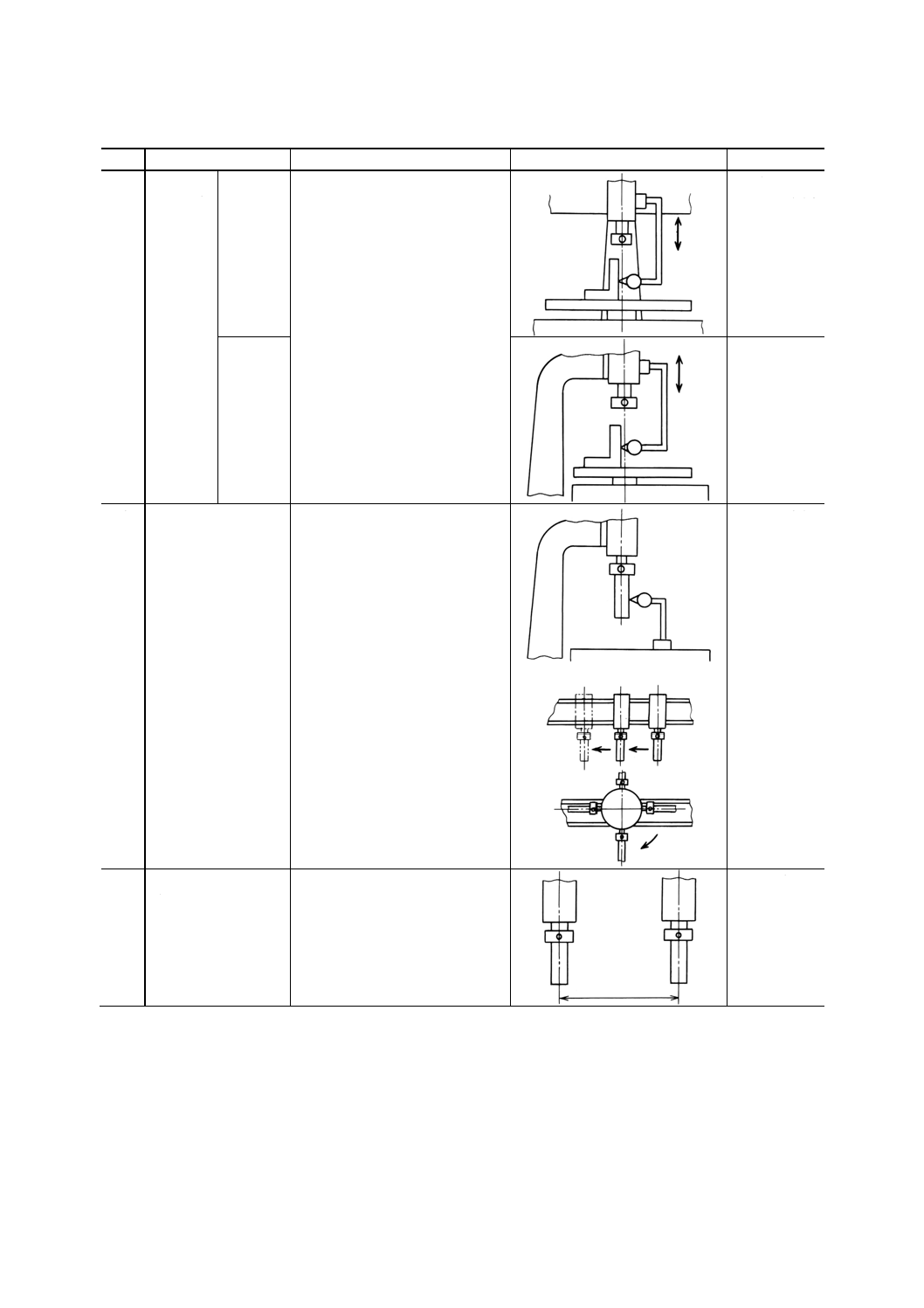
5. 機械精度検査方法
5.1
静的精度検査 数値制御ルータの静的精度検査は,表8による。
表8 静的精度検査
単位mm
番号
検査項目
測定方法
測定方法図
許容値
1
テーブル上面の真直
度
テーブル上面に1 000mmの直定
規を対角線上に置き,すきまをす
きまゲージで測定し,その最大値
を測定値とする(13)(14)。
1 000について
0.08
2
主軸の振れ(15)
主軸のチャック取付部にテスト
インジケータを当てて,主軸を手
動で回転し,回転中におけるテス
トインジケータの読みの最大差
を測定値とする。
0.01
3
チャックの振れ(15)
チャックにテストバーを取り付
け,その口元及び先端にテストイ
ンジケータを当てて,主軸を手動
で回転し,回転中におけるテスト
インジケータの読みの最大差を
測定値とする。
テストバー
の口元で
0.02
テストバー
の口元から
50の位置で
0.03
4
主軸中心
線とテー
ブル上面
との直角
度(15) (16)
X軸方向 テーブルを行程の中央に固定し,
直定規をテーブル上面の中央に
置き,主軸に固定したテストイン
ジケータをこれに当てて,180°
振り回し,X軸方向及びY軸方
向のテストインジケータの読み
の最大差を測定値とする。
振り回し直
径300につ
いて
0.08
Y軸方向
振り回し直
径300につ
いて
0.08
7
B 6572 : 1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位mm
番号
検査項目
測定方法
測定方法図
許容値
5
テーブル
上面と主
軸の上下
の動きと
の直角度
(16)
X軸方向 テーブル上面に直角定規を立て,
主軸頭に固定したテストインジ
ケータをこれに当てて,主軸を上
下に移動させ,テストインジケー
タの読みの最大差を測定値とす
る(17)。
200について
0.06
Y軸方向
200について
0.06
6
主軸の整列度
各主軸にテストバーを取り付け,
テーブル上面に定置したテスト
インジケータをこれに当てて,各
主軸を移動又は旋回させ,テスト
インジケータの読みの最大差を
測定値とする。
0.05
7
主軸間ピッチ誤差
(15)
各主軸にテストバーを取り付け,
主軸間ピッチをマイクロメータ
で測定する。
±0.05
8
B 6572 : 1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位 mm
番号
検査項目
測定方法
測定方法図
許容値
8
テーブル
上面と主
軸又はテ
−ブルの
動きとの
平行度
(16)
X軸方向 主軸に取り付けたテストインジ
ケータをテーブル上面に当てて,
テーブル又は主軸をX軸方向又
はY軸方向に移動させ,全移動
距離内におけるテストインジケ
ータの読みの最大差を測定値と
する。
この測定は,テーブルの中央及び
両端の3か所で行う。
1 000について
0.15
Y軸方向
1 000について
0.15
9
Y軸方向の動きとX
軸方向の動きとの直
角度
テーブル上面に直角定規を置き,
まずX方向の動きに平行に定規
を固定させ,テストインジケータ
をY方向に当ててテストインジ
ケータ又はテーブルを移動させ,
その読みの最大差を測定値とす
る。
500について
0.15
注(13) 測定距離が基準 (1 000mm) より小さい場合には,測定の許容値を距離に比例させて換算する。
(14) 測定距離が基準 (1 000mm) より大きい場合には,1対角線上の少なくとも2か所で測定し,読みの最大
値を測定値とする。
(15) この測定は,すべての主軸について行う。
(16) この測定は,すべてのテーブルについて行う。
(17) この測定の際,テーブルは,前後方向及び左右方向の動きの中央に置く。
備考 その機能をもたない数値制御ルータでは,表8中のこれに該当する検査項目を省略する。
5.2
位置決め精度試験及び検査
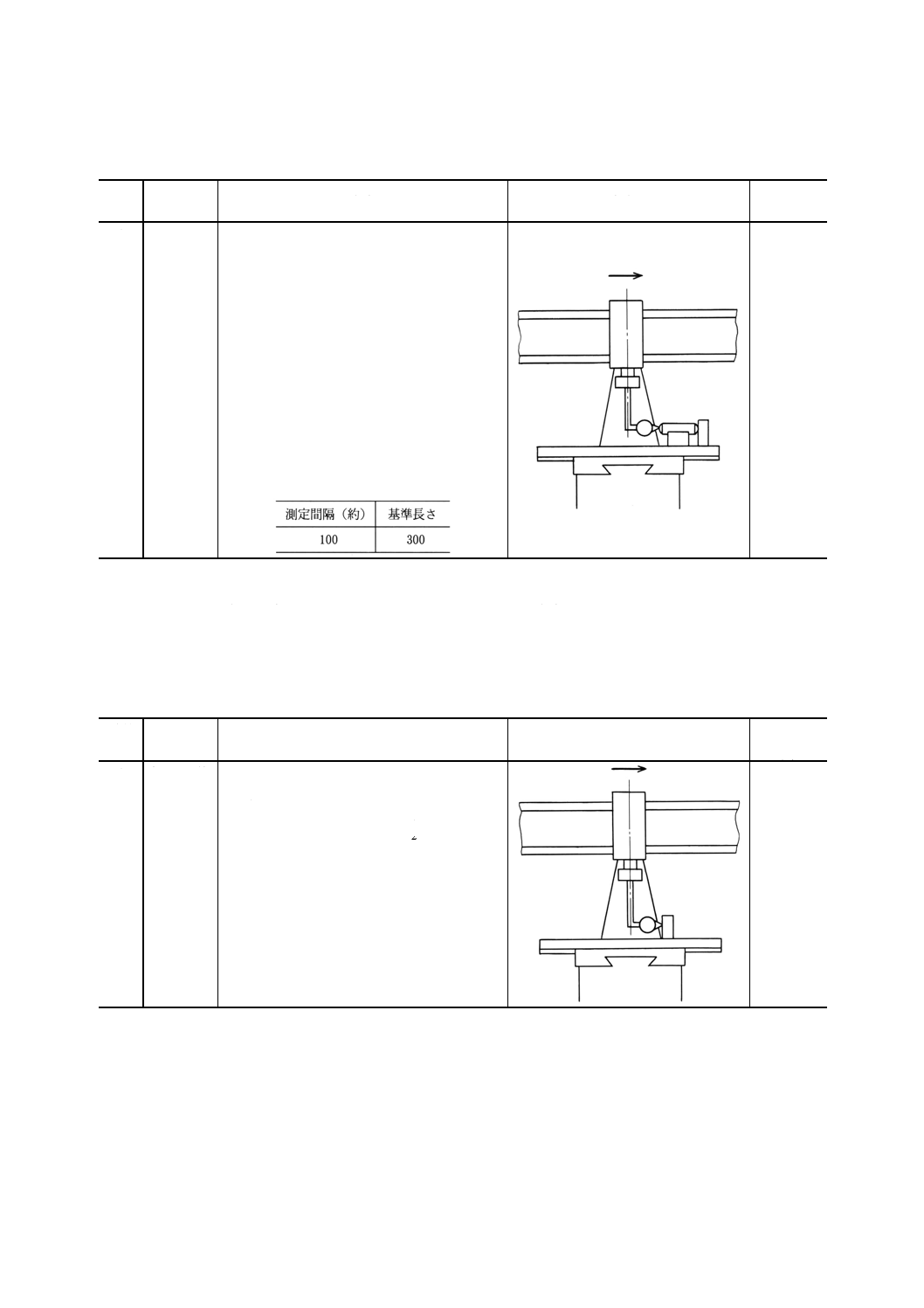
5.2.1
一方向位置決め精度検査 一方向位置決め精度検査は,表9による。
9
B 6572 : 1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表9 一方向位置決め精度検査
単位mm
番号 検査項目
測定方法
測定方法図
許容値
(18)
1
一方向位
置決め精
度
主軸又はテーブルをあらかじめ正(又は負)
の向きに移動して停止させ,その位置を基準
にして同じ向きに早送りで表に規定する測
定間隔で順次位置決めを行い,それぞれの位
置で,基準位置から実際に移動した距離と移
動すべき距離との差を測定し,それらの基準
長さ内における最大差を求める。
この測定は,移動量のほぼ全域にわたって行
い,求めた最大差のうちの最大値を測定値と
する。
この測定は,各制御軸の正及び負の向きのそ
れぞれについて行う。
表
基準長さ
について
0.03
注(18) この許容値は,最小設定単位0.01mm以下のものについて適用する。
備考1. ピッチ誤差補正装置,バックラッシ補正装置などを具備するものは,これを使用して行う。
2. ある1軸の測定の際は,他の運動部は動きの中央,又は安定した位置に置く。
3. 測定の際は,テーブル上は無負荷とする。
5.2.2
繰返し位置決め精度検査 繰返し位置決め精度検査は,表10による。
表10 繰返し位置決め精度検査
単位mm
番号 検査項目
測定方法
測定方法図
許容値
(18)
1
繰返し位
置決め精
度
原則として早送り(19)で,任意の1点を標点
として同じ向きから同一条件で主軸又はテ
ーブルの位置決めを7回繰り返して停止位
置を測定し,読みの最大差の21を求める。
この標点は,移動距離の中央及びほぼ両端の
それぞれの位置に選び,求めた値のうちの最
大のものに (±) を付けた値を測定値とす
る。
この測定は,各制御軸の正及び負の向きのそ
れぞれについて行う。
±0.01
注(19) 早送りは,自動加減速を含めた距離以上とする。
備考1. ピッチ誤差補正装置,バックラッシ補正装置などを具備するものは,これを使用して行う。
2. ある1軸の測定の際は,他の運動部は動きの中央,又は安定した位置に置く。
3. 測定の際は,テーブル上は無負荷とする。
10
B 6572 : 1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
5.2.3
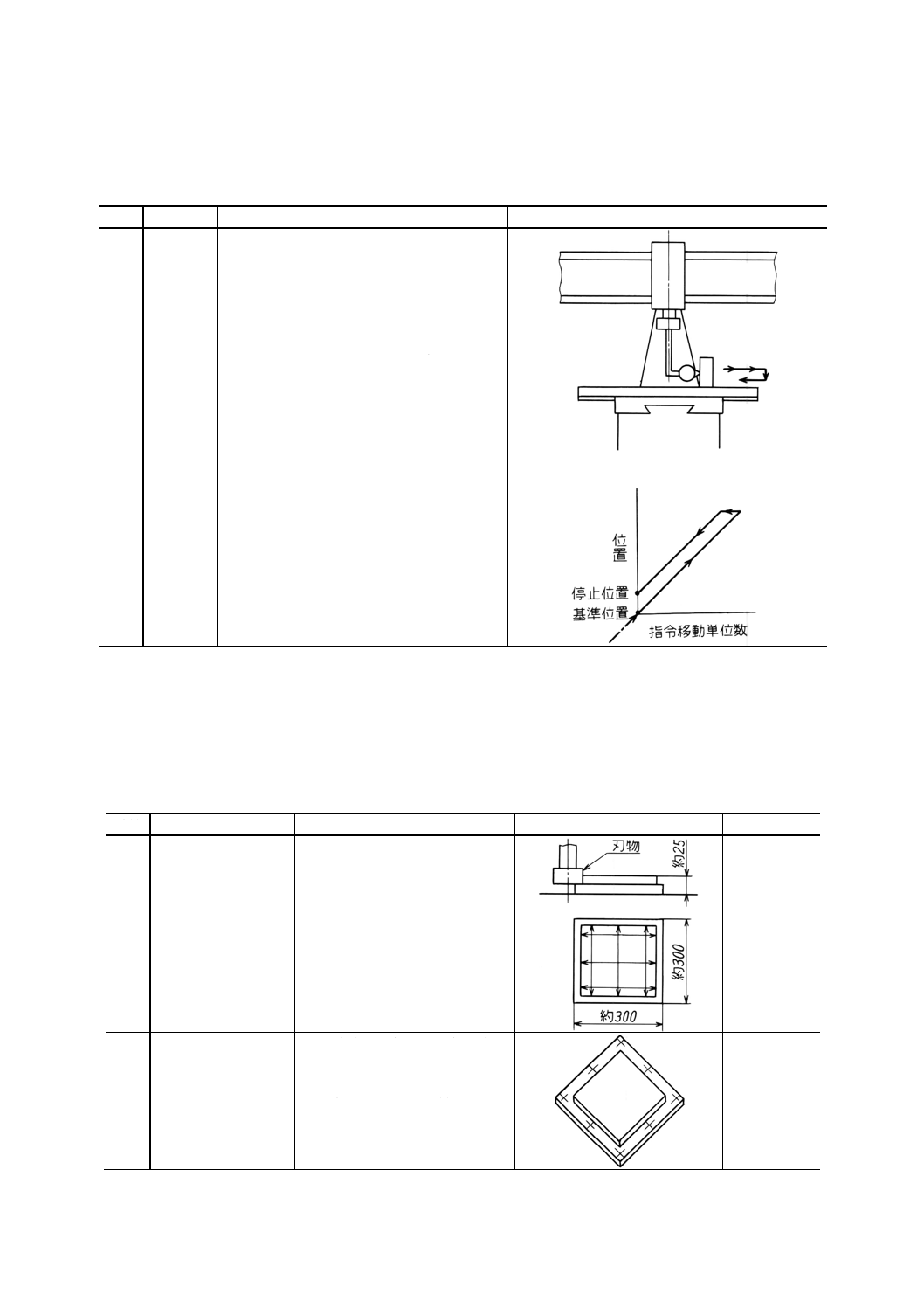
反転位置決め精度試験(ロストモーション試験) 反転位置決め精度試験は,表11による。
表11 反転位置決め精度試験
単位mm
番号 試験項目
測定方法
測定方法図
1
反転位置
決め精度
あらかじめ正(又は負)の向きに移動させて
停止した位置を基準位置として,同じ向きに
任意の指令を与えて移動(3)させ,その位置か
ら負(又は正)の向きに同一の指令を与えて
移動させたときの停止位置と基準位置との
差を測定する。
この測定は,動きの中央及びほぼ両端の3か
所でそれぞれ7回繰り返して行い,各箇所で
の平均値を求め,得られた平均値のうちの最
大値を測定値とする。
この測定は,各制御軸の正及び負の向きのそ
れぞれについて行う。
備考1. ピッチ誤差補正装置,バックラッシ補正装置などを具備するものは,これを使用して行う。
2. ある1軸の測定の際は,他の運動部は動きの中央,又は安定した位置に置く。
3. 測定の際は,テーブル上は無負荷とする。
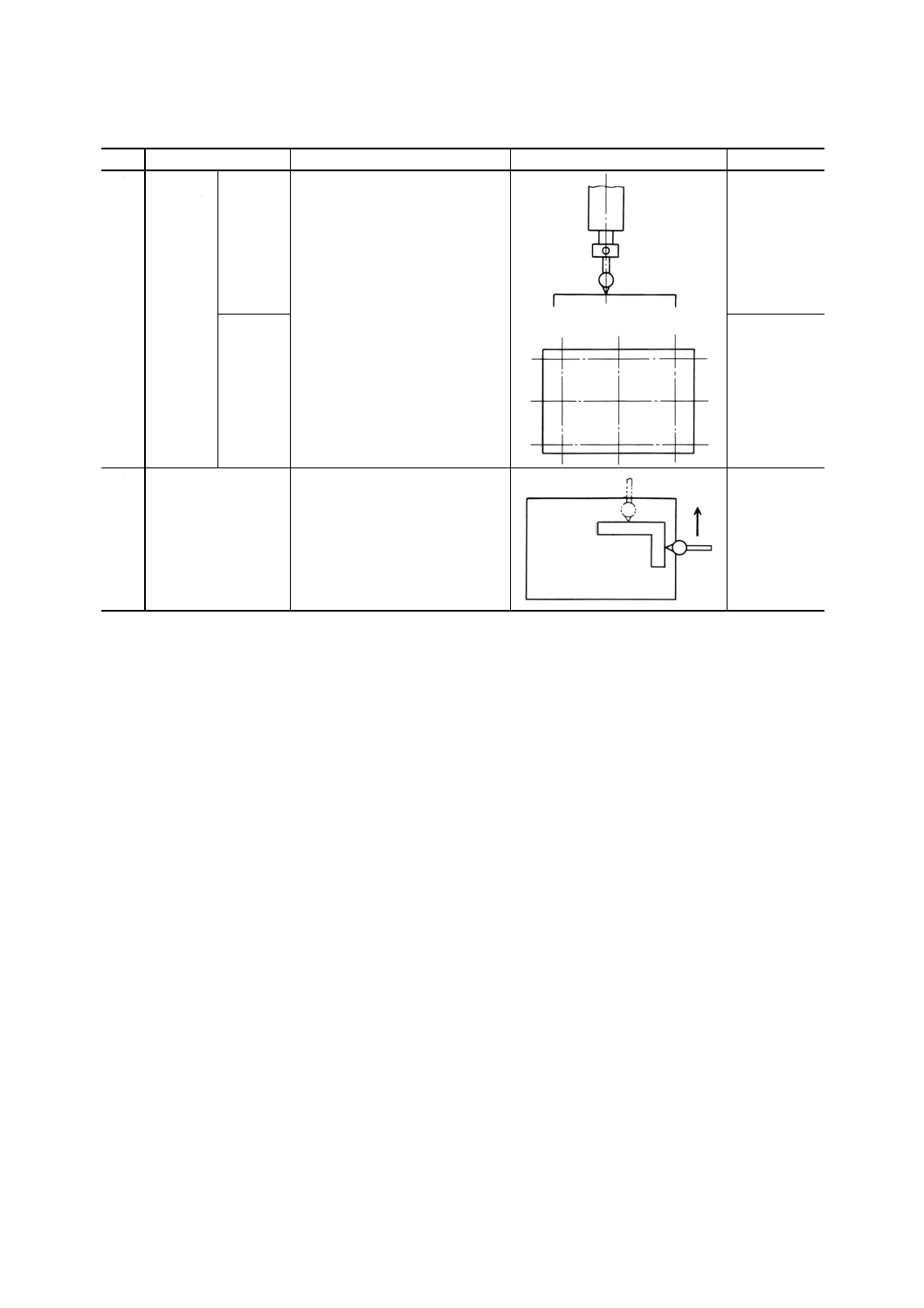
6. 工作精度検査方法 数値制御ルータの工作精度検査は,表12による。
表12 工作精度検査
単位mm
番号
検査項目
測定方法
測定方法図
許容値
1
加工寸法精度
試験材の4側面を厚さの中央付
近まで削り取り,X軸及びY軸
方向の幅を中央及び両端につい
てノギスで測定し,指令寸法と実
質寸法との差を求め,そのうちの
最大のものを測定値とする
0.15
2
厚さの精度
上記試験材の削取り残部の高さ
を,周辺8か所についてノギスで
測定し,指令寸法と実質寸法との
差を求め,そのうちの最大のもの
を測定値とする。
0.10
11
B 6572 : 1992
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
単位mm
番号
検査項目
測定方法
測定方法図
許容値
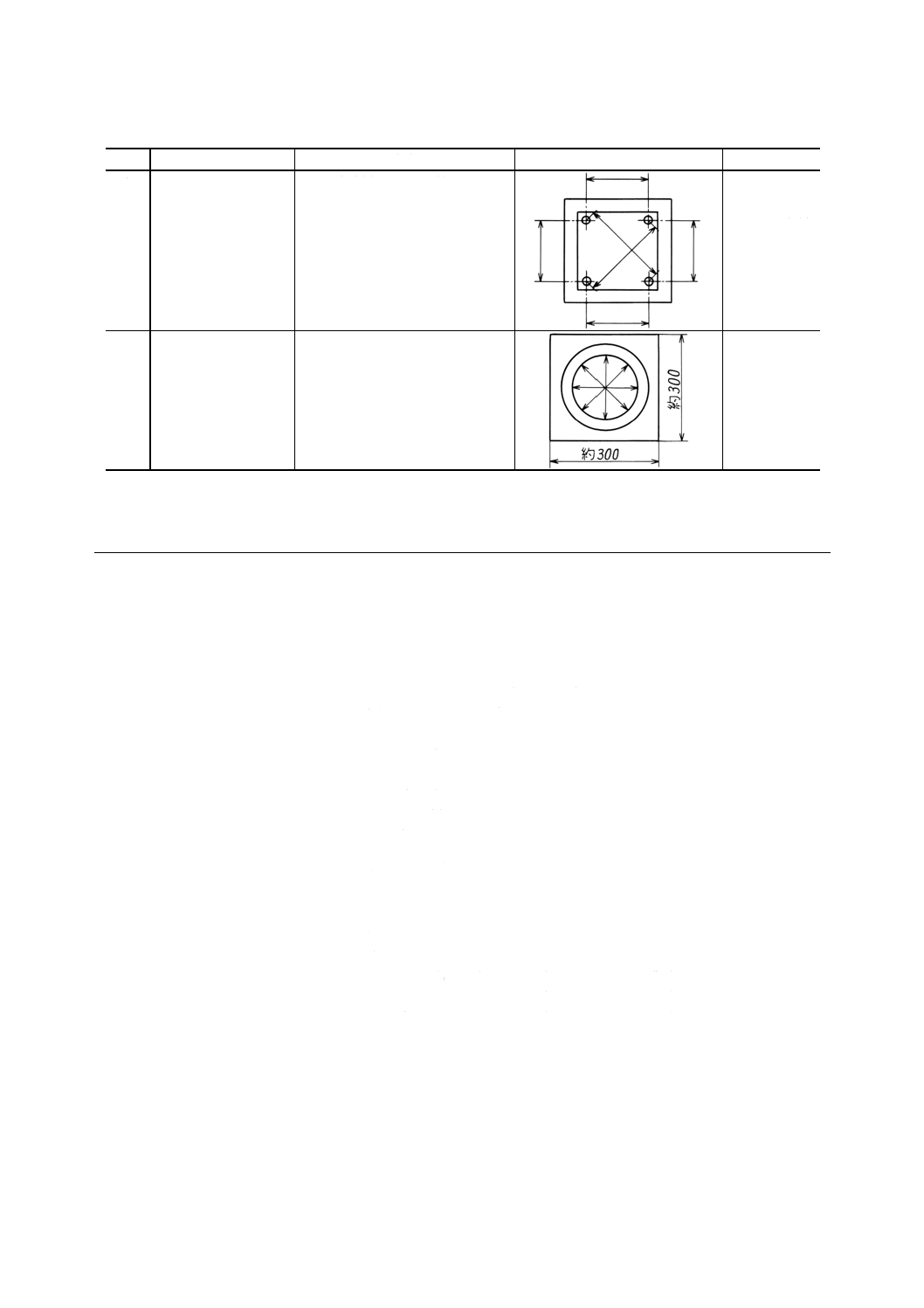
3
位置決め加工の精度
上記試験材の四隅に等間隔に穴
あけを行い,穴相互間の中心距離
をそれぞれ測定し,対応する中心
距離の指令寸法(20)と実質寸法と
の差を求め,そのうちの最大のも
のを測定値とする。
X軸方向及
びY軸方向
0.10
対角方向
0.15
4
円弧加工の精度
試験材に円弧の加工を行い,45°
の角度間隔をなす円弧の4直径
をノギスで測定し,その最大差を
測定値とする。
0.15
注(20) 対角方向の指令値は,X,Y軸方向の指令値を参考とし,計算して求める。
備考1. 工作物は,テーブルの中央又は安定した位置において加工する。
2. 試験材は,あらかじめ必要な前加工をする。
関連規格 JIS B 6501 木材加工機械の試験方法通則
JIS B 6511 ルータの試験及び検査方法
JIS B 6571 数値制御木工機械−操作表示記号
JIS B 6572原案作成委員会 構成表
氏名
所属
(委員長)
福 井 尚
東京農業大学農学部
(委員)
喜 田 勝治郎
通商産業省機械情報産業局
桐 山 和 臣
工業技術院標準部
木 下 敍 幸
農林水産省林野庁森林総合研究所
梅 津 二 郎
職業訓練大学校建築科
黒 木 勝 也
財団法人日本規格協会技術・検査部
新 井 茂 雄
マルゼン家具工業株式会社
宮 本 栄 一
有限会社矢木工作所
佐 藤 久
社団法人全国家具工業連合会
磯 谷 育 男
富士木工株式会社
谷 野 八 郎
庄田鉄工株式会社
菊 川 博 史
株式会社菊川鉄工所
寺 尾 忠 雄
北川工業株式会社
鈴 木 伸 吉
株式会社平安コーポレーション
村 上 勝
社団法人全国木工機械工業会
(事務局)
雨 宮 礼 一
社団法人全国木工機械工業会
佐久間 章 雄
社団法人全国木工機械工業会