A 8424:2003
(1)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
まえがき
この規格は,工業標準化法第12条第1項の規定に基づき,社団法人 日本建設機械化協会(JCMA)/財
団法人 日本規格協会(JSA)から,工業標準原案を具して日本工業規格を制定すべきとの申出があり,日本
工業標準調査会の審議を経て,経済産業大臣が制定した日本工業規格である。
制定に当たっては,日本工業規格と国際規格との対比,国際規格に一致した日本工業規格の作成及び日
本工業規格を基礎にした国際規格原案の提案を容易にするために,ISO 8811:2000,Earth-moving machinery
―Rollers and landfill-compactors―Terminology and commercial specificationsを基礎として用いた。
この規格の一部が,技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の
実用新案登録出願に抵触する可能性があることに注意を喚起する。主務大臣及び日本工業標準調査会は,
このような技術的性質をもつ特許権,出願公開後の特許出願,実用新案権,又は出願公開後の実用新案登
録出願にかかわる確認について,責任はもたない。
JIS A 8424には,次に示す附属書がある。
附属書1(参考)JISと対応する国際規格との対比表
A 8424:2003
(2)
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
目 次
ページ
序文 ··································································································································· 1
1. 適用範囲 ························································································································ 1
2. 引用規格 ························································································································ 1
3. 定義 ······························································································································ 2
4. 本体の形式 ····················································································································· 3
5. 各部の名称 ····················································································································· 7
6. 寸法 ····························································································································· 10
7. エンジンネット軸出力 ····································································································· 17
8. 最高走行速度 ················································································································· 17
9. 最大許容傾斜角 ·············································································································· 17
10. 登坂能力 ····················································································································· 17
11. 仕様項目 ····················································································································· 17
附属書1(参考)JISと対応する国際規格との対比表 ·································································· 19
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
日本工業規格 JIS
A 8424:2003
土工機械―締固め機械―用語及び仕様項目
Earth-moving machinery―Rollers and landfill-compactors―Terminology and
commercial specifications
序文 この規格は,2000年に第1版として発行されたISO 8811:2000,Earth-moving machinery―Rollers and
landfill-compactors―Terminology and commercial specificationsを翻訳し,技術的内容を変更して作成した日
本工業規格である。
なお,この規格で側線又は点線の下線を施してある箇所は,原国際規格を変更している事項である。変
更の一覧表をその説明を付けて,附属書1(参考)に示す。
1. 適用範囲 この規格は,締固め機械 (rollers and landfill compactors)並びにその作業装置について,用語
及び仕様項目を規定する。各種形式の締固め機械及びその用語を定義し,更にこれらの寸法及びアタッチ
メントを示す記号を規定する。
備考 この規格の対応国際規格を,次に示す。
なお,対応の程度を表す記号は,ISO/IEC Guide21に基づき,IDT(一致している),MOD(修
正している),NEQ(同等でない)とする。
ISO 8811:2000,Earth-moving machinery―Rollers and landfill-compactors―Terminology and
commercial specifications (MOD)
2. 引用規格 次に掲げる規格は,この規格に引用されることによって,この規格の規定の一部を構成す
る。これらの引用規格は,その最新版(追補を含む。)を適用する。
JIS A 8319 土工機械―走行速度の測定方法
備考 ISO 6014:1986 Earth-moving machinery―Determination of ground speedが,この規格と一致し
ている。
JIS A 8320 土工機械―機械全体,作業装置及び構成部品の質量測定方法
備考 ISO 6016:1998 Earth-moving machinery―Methods of measuring the masses of whole machines,
their equipment and componentsが,この規格と一致している。
JIS A 8411-1 土工機械―寸法及び記号の定義―第1部:本体
備考 ISO 6746-1:1987 Earth-moving machinery―Definitions of dimensions and symbols―Part 1: Base
machineが,この規格と一致している。
JIS A 8411-2 土工機械--寸法及び記号の定義--第2部:作業装置
備考 ISO 6746-2:1987 Earth-moving machinery―Definitions of dimensions and symbols―Part 2:
Equipment が,この規格と一致している。
JIS D 0006-1 土工機械―エンジン―第1部:ネット軸出力試験方法
2
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
備考 ISO 9249:1997 Earth-moving machinery―Engine test code―Net powerが,この規格と一致して
いる。
3. 定義 この規格で用いる主な用語の定義は,次による。
3.1
一般
3.1.1
ランドフィルコンパクタ 自走する車輪(ホイール)式の機械で,前部にエクィップメントとして
ドーザ又は積込用アタッチメント(作業具)をもち,廃棄物を破砕し及び締め固める車輪を装備し,走行
動作によって土砂,埋立て材又は廃棄物を移動,整地又は積み込むもの。
3.1.2
ローラ 自走式又は被けん引式の締固め機械で,一つ以上の鉄輪又はゴムタイヤからなる締固め装
置をもち,転動及び/又は締固め装置の振動によって,砕石,土砂,アスファルト舗装材,砂利などを締
め固めるもの。
参考 締固め輪としての鉄輪(振動輪を含む。)及びタイヤを組み合わせてもつ合成ローラをコンバイ
ンドローラという。
3.1.3
被けん引式ローラ(towed roller) けん引機械によって運転される被けん引式ローラで,運転席がけ
ん引機械側にあるローラ。
3.1.4
本体(Base machine) 製造業者の仕様書によって規定する機械で,エクィップメント又はアタッチ
メントを取り付けるための台座を備え,キャブ,キャノピ,転倒時保護構造(1),落下物保護構造(2)などを
含む。
注(1) 転倒時保護構造:一般にROPS(ロップスRoll-over protective structureの略)と呼ぶ。
(2) 落下物保護構造:一般にFOPS (ホップスFalling object protective structureの略)と呼ぶ。
3.1.5
エクィップメント(equipment) 機械本来の設計機能を果たすために本体に装着される構成部品の
セット。アタッチメントを装着して用いる。
備考 JIS A 8411-2参照。
3.1.6
アタッチメント(attachment) 特定の用途のために,本体又はエクィップメントに装着される構成
部品の組立品。
備考 JIS A 8411-2参照。
3.1.7
構成部品(component) 本体,エクィップメント又はアタッチメントの部品若しくはその組立品。
備考 JIS A 8411-2参照。
3.1.8
バラスト(ballast) 水,砂又は取り外し可能な付加荷重とその支持具で,質量を増すために追加さ
れるもの。
3.2
質量及び振動(masses and vibration)
3.2.1
運転質量(operating mass) 規定量の燃料,潤滑油,作動油及び冷却水を搭載し,製造業者が指定
するエクィップメント及びアタッチメント,携行工具その他の附属品,キャブ又はキャノピ,転倒時保護
構造,落下物保護構造などを装備した本体に,バラスト及び乗車定員(1名当たり75kg)の質量を加えた質
量。
備考 JIS A 8320参照。
3.2.2
出荷質量(shipping mass) 燃料を規定量の10%とし,潤滑油,作動油及び冷却水を規定量として乗
員を含まない本体の質量。製造業者の指定によって,キャブ,キャノピ,転倒時保護構造,落下物保護構
造,ホイール及びバラストを取り付けるか又は除いた質量とする。
備考 JIS A 8320参照。
3
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
3.2.3
キャブ,キャノピ,転倒時保護構造及び/又は落下物保護構造の質量(cab, canopy, ROPS and/or
FOPS mass) 本体への取付具を含めたキャブ,キャノピ,転倒時保護構造又は落下物保護構造の質量。
備考 出荷のために機械から取り外す部品の質量を,製造業者が指定する。
3.2.4
起振部の質量(mass of vibrated parts) 振動輪(vibrating drum)とこれに一体に連結されたすべての
部分を含む質量。
3.2.5
絶縁部の質量(mass of isolated parts) 振動輪によって支持され,振動から絶縁されるすべての部分
の質量。
3.2.6
振動数(frequency) 1秒間のサイクル数 。
備考 振動数は,ヘルツ(Hz)で表示する。
3.2.7
偏心モーメント(質量)(eccentric moment - mass) 偏心質量とその偏心半径を乗じたもの。
備考 偏心モーメント(質量)は,キログラム・メートル(kg・m)で表示する。
3.2.8
起振力(centrifugal force) 偏心モーメント(質量)と角回転速度の2乗を掛けて1000で除したも
の。
備考 起振力は,キロニュートン (kN)で表示する。
3.2.9
呼び振幅(nominal amplitude) 偏心モーメント(質量)(3.2.7)掛ける1 000を振動部の質量で除し
たもの。
備考 呼び振幅は,ミリメートル (mm)で表示する。
3.3
線圧及び面圧(linear load and surface pressure)
3.3.1
線圧(linear load - force) 平滑胴の場合,鉄輪によって地面が負担するに加えられる運転質量に重
力加速度を乗じたものを,バラスト付き又はバラストなしの条件ごとに,鉄輪の幅で除したもの。
備考 線圧は,メートル当たりニュートン (N/m)で表示する。
3.3.2
面圧(surface pressure) パットフート及びシープフートドラムの場合,鉄輪によって地面に加えら
れる荷重を,バラスト付き又はバラストなしの条件ごとに,水平地面に同時に接触する最少数のフートの
全接触面積で除したもの。
備考 面圧は,パスカル (Pa)で表示する。
3.3.3
理論的面圧(theoretical surface pressure) 空気タイヤの場合,タイヤにかかる機械の配分荷重を,
バラスト付き又はバラストなしの条件ごとに,平たんな堅い地面上で測定したタイヤの全接触面積で除し
たもの。
備考 理論的面圧は,パスカル (Pa)で表示する。理論的面圧の値は,輪荷重,タイヤの内圧及びタイ
ヤの接触面積との関係として図示してもよい。
4. 本体の形式
4.1
向きと位置 右又は左,前又は後などの向き及び位置づけに関連した事項は,本体を操縦する運転
席及び製造業者が規定する基本的な進行方向との関係を考慮して決めなければならない。
4.2
被けん引式及び手押し(ハンドガイド)式の機械
4.2.1
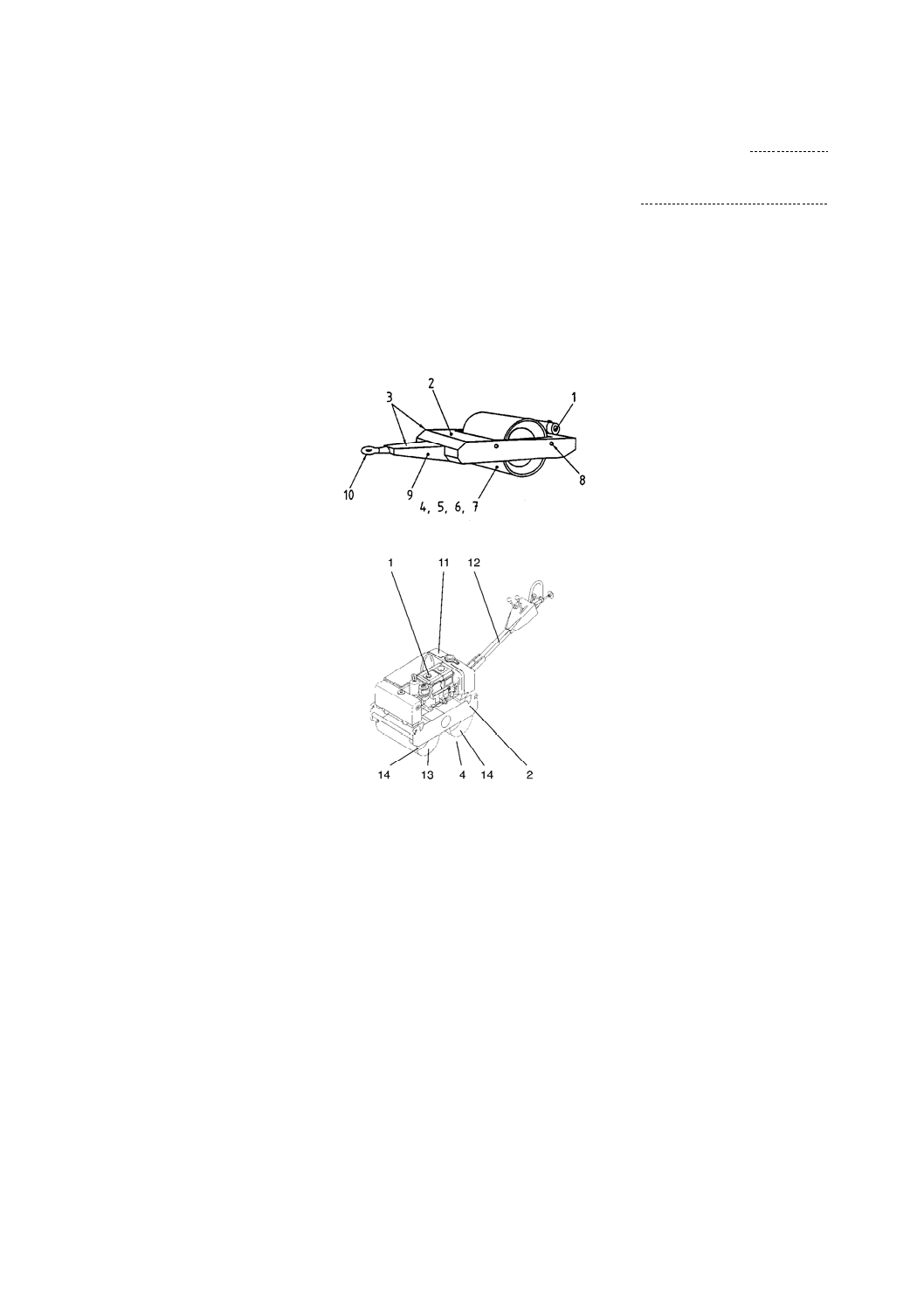
被けん引式単輪形静的ローラ(図1参照) 被けん引式単輪形静的ローラは,図1に示されている。
図 1 被けん引式単輪形静的ローラ
4
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.2.2
被けん引式単輪形振動ローラ(図2参照) 被けん引式単輪形振動ローラは,図2に示されている。
図 2 被けん引式単輪形振動ローラ
4.2.3
手押し(ハンドガイド)式単輪形静的ローラ(図3参照) 手押し(ハンドガイド)単輪形静的ロ
ーラは,図3に示されている。
4.2.4
手押し(ハンドガイド)式単輪形振動ローラ(図3参照) 手押し(ハンドガイド)式単輪形振動
ローラも,図3に示されている。
図 3 手押し(ハンドガイド)式単輪形静的又は振動ローラ
4.2.5
手押し(ハンドガイド)式二輪形振動ローラ(図4参照) 手押し(ハンドガイド)式二輪形振動
ローラは,図4に示されている。
図 4 手押し(ハンドガイド)式二輪形振動ローラ
4.2.6
トレンチローラ(図5参照) トレンチローラは,図5に示されている。
図 5 トレンチローラ
4.3
自走式の機械
4.3.1
一体フレームで前又は後に操向輪の取付けヨークをもつ,二輪形静的ローラ(図6参照) 一体フ
レームで前又は後に操向輪の取付けヨークをもつ,二輪形静的ローラは,図6に示されている。
5
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図 6 一体フレームで前又は後に操向輪の取付けヨークをもつ,二輪又は三輪形静的ローラ
4.3.2
車体屈折式二輪形又は四輪形静的ローラ(図7参照) 車体屈折式二輪又は四輪形静的ローラは,
図7に示されている。
図 7 車体屈折式二輪又は四輪形静的ローラ
4.3.3
一体フレームで前又は後に操向輪の取付けヨークをもつ,三輪形静的ローラ(図6参照) 一体フ
レームで前又は後の操向輪の取付けヨークをもつ,三輪形静的ローラは,図6に示されている。
4.3.4
車体屈折式三輪形静的ローラ(図8参照) 車体屈折式三輪形静的ローラは,図8に示されている。
図 8 車体屈折かじ取り式三輪形静的ローラ又は振動ローラ
4.3.5
一体フレームでスキッドステア式の四輪形スタティックローラ 一体フレームでスキッドステア
式の四輪形静的ローラは,図示を省略する。
4.3.6
一体フレームで前又は後にかじ取り用のヨークをもつタイヤローラ(図9参照) 一体フレームで
前又は後にかじ取り用のヨークをもつタイヤローラは,図9に示されている。
6
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図 9 一体フレームで前又は後にかじ取り用のヨークをもつタイヤローラ
4.3.7
車体屈折式タイヤローラ 車体屈折式タイヤローラは,図示を省略する。
4.3.8
一体フレームで前又は後に操向輪の取付けヨークをもつ,二輪形振動ローラ 一体フレームで前又
は後に操向輪の取付けヨークをもつ,二輪形振動ローラは,図示を省略する。
4.3.9
車体屈折式で,単輪又は二輪の振動輪をもつ,二輪形振動ローラ 車体屈折式で,単輪又は二輪の
振動輪をもつ,二輪形振動ローラは,図示を省略する。
4.3.10 一体フレームで前又は後に操向輪の取付けヨークをもつ,三輪形振動ローラ(図6参照) 一体フ
レームで前又は後に操向輪の取付けヨークをもつ,三輪形振動ローラは,図6に示されている。
4.3.11 車体屈折式三輪形振動ローラ(図8参照) 車体屈折式三輪形振動ローラは,図8に示されている。
4.3.12 車体屈折式四輪形振動ローラ(図7参照) 車体屈折式四輪形振動ローラは,図7に示されている。
4.3.13 車体屈折式単輪形振動ローラ(図10参照) 車体屈折式単輪形振動ローラは,図10に示されてい
る。
備考 この形式の機械は,また鉄輪駆動をすることもできる。
図 10 車体屈折式単輪形振動ローラ
4.3.14 かにかじ取り又は鉄輪オフセットかじ取りヒッチをもつ,二輪形静的又は振動ローラ(図11参照)
かにかじ取り又は鉄輪オフセットかじ取りヒッチをもつ,二輪形静的又は振動ローラは,図11に示されて
いる。
図 11 かにかじ取り又は鉄輪オフセットかじ取りヒッチをもつ,二輪形静的又は振動ローラ
4.3.15 車体屈折式コンバインドローラ 車体屈折式コンバインドローラは,図示を省略する。
7
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
4.3.16 一体フレームでかじ取り輪の取付けヨークを含む二つのヨークをもつ,三輪形ローラ 一体フレー
ムでかじ取り輪の取付けヨークを含む二つのヨークをもつ,三輪形ローラは,図示を省略する。
4.3.17 振動ドラム及びヨーク取付式空気タイヤをもつ,コンバインドローラ 振動ドラム及びヨーク取付
け空気タイヤをもつ,コンバインドローラは,図示を省略する。
5. 各部の名称
5.1
被けん引式及び自走手押し(ハンドガイド)式,静的又は振動ローラの本体
5.1.1
4.2.1及び4.2.2に関係する各部の名称は,図12 a) を参照する。
5.1.2
4.2.5に関係する各部の名称は,図12 b) を参照する。
a) 被けん引式一輪形静的又は振動ローラ
b) 手押し(ハンドガイド)式二輪形振動ローラ
1 エンジン
8 つり上げ用孔
2 フレーム
9 けん引バー
3 バラスト
10 けん引フック
4 振動輪
11 水タンク
5 シープフート(鉄輪)
12 かじ取り用ボール/ハンドル
6 バッドフート(鉄輪)
13 駆動輪
7 グリッド(鉄輪)
14 駆動輪の駆動部
図 12 被けん引及び自走式の本体
5.2
搭乗自走式の本体
5.2.1
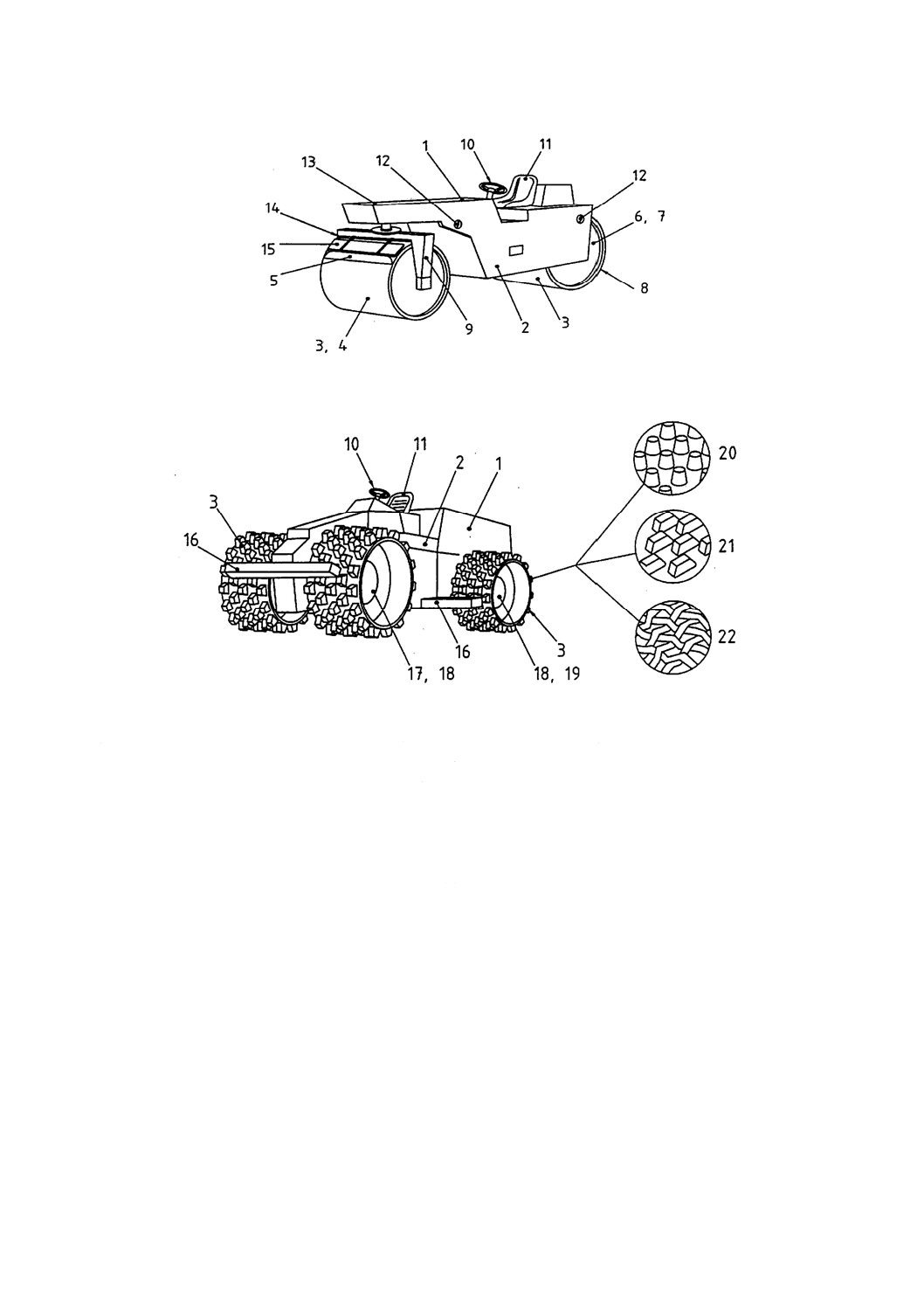
4.3.1及び4.3.8に関する各部の名称は,図13a)を参照する。
5.2.2
4.3.5及び4.3.13に関する各部の名称は,図13b)を参照する。
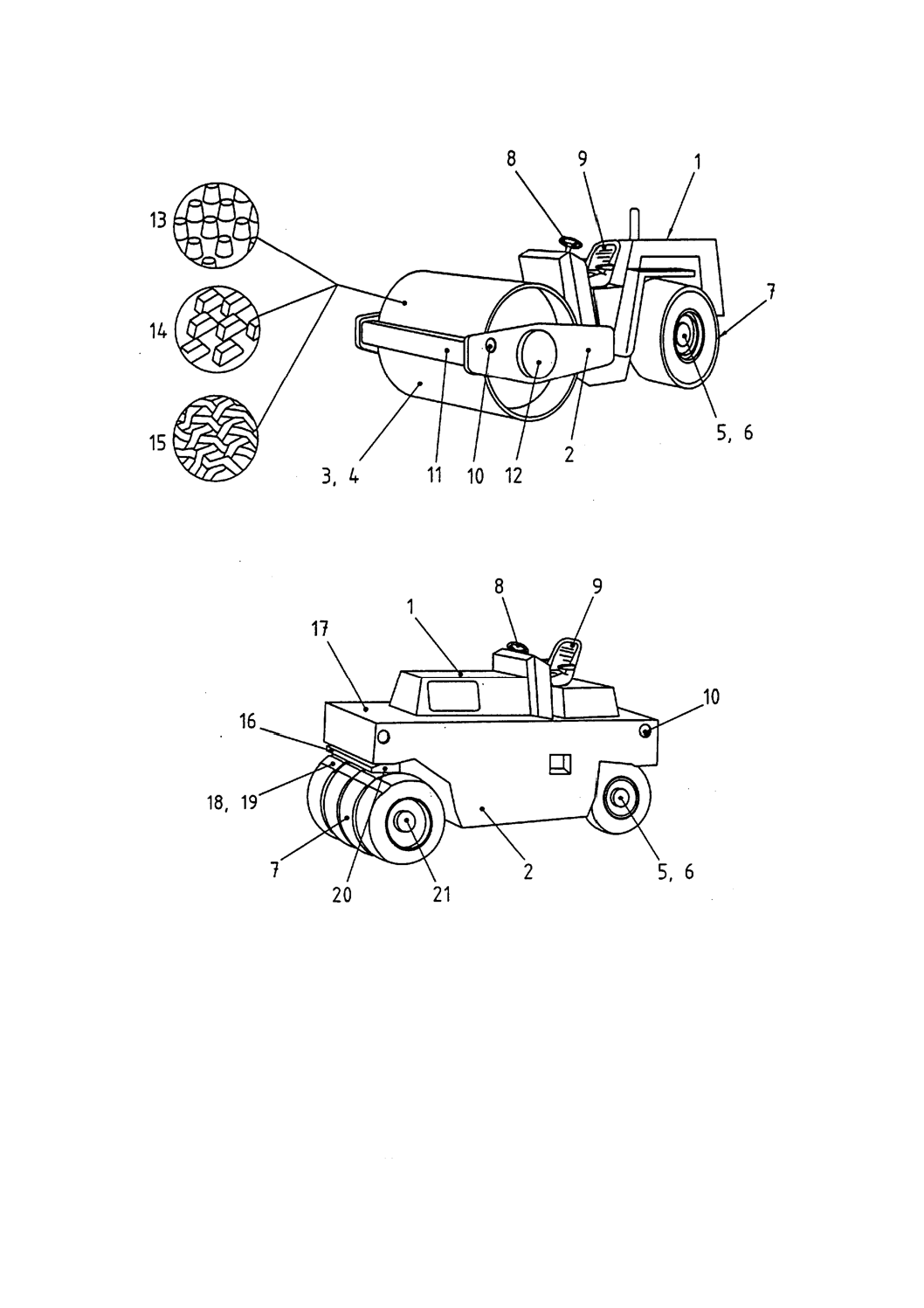
5.2.3
4.3.13に関する各部の名称は,図13c)を参照する。
5.2.4
4.3.6及び4.3.7に関する各部の名称は,図13d)を参照する。
8
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 二輪形静的又は振動ローラ
b) 四輪形又は単振動輪二駆動輪形振動ローラ
1 エンジン
9 かじ取りヨーク
17 前軸
2 フレーム
10 ステアリングホイール
18 駆動軸
3 駆動輪
11 運転座席
19 後軸
4 操向輪
12 つり上げ用孔
20 シープフート(鉄輪)
5 スクレーパ
13 水タンク
21 パッドフート(鉄輪)
6 鉄輪
14 散水パイプ
22 グリッド(鉄輪)
7 鉄輪の駆動部
15 マット
8 振動輪
16 スクレーパ用バー
図 13 自走式の本体
9
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
c) 単振動輪二駆動輪形振動ローラ
d) タイヤローラ
1 エンジン
8 ステアリングホイール
15 グリッド(鉄輪)
2 フレーム
9 運転座席
16 散水パイプ
3 駆動輪
10 つり上げ用孔
17 水タンク
4 振動輪
11 スクレーパ用バー
18 スクレーパ
5 後軸
12 鉄輪の駆動部
19 マット
6 駆動軸
13 シープフート(鉄輪)
20 かじ取りヨーク
7 タイヤ
14 バッドフート(鉄輪)
21 前軸
図 13 自走式の本体(続き)
10
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
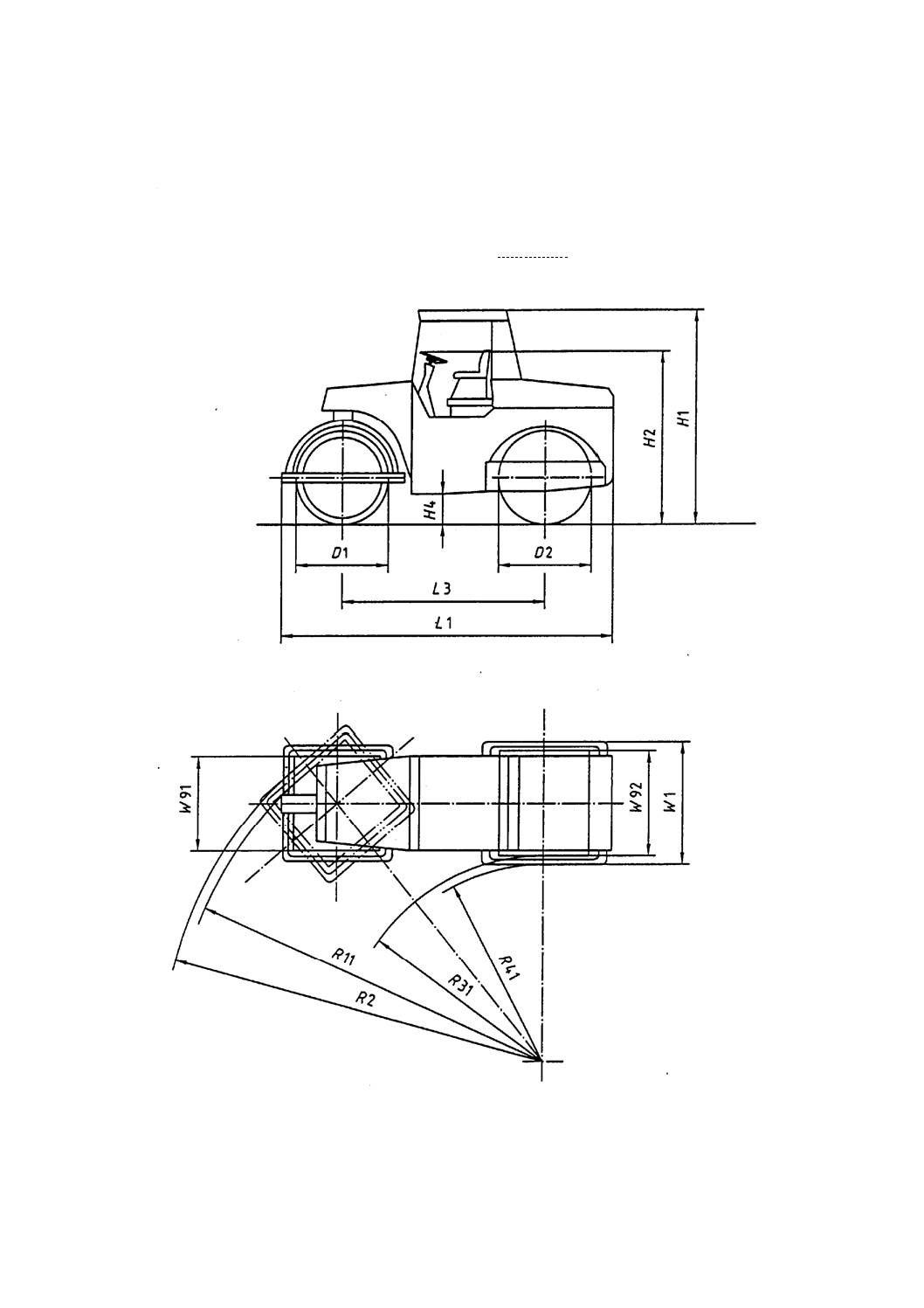
6. 寸法
6.1
本体
6.1.1
締固め機械に直接関係する寸法の定義及び記号は,表1に示すものを適用する。
6.1.2〜6.1.4及び図14〜図16 については,JIS A 8411-1及び 表1に示すものを適用する。
6.1.2
4.3.1及び4.3.8に関する寸法表示は,図14を参照する。
図 14 一体フレームで前又は後に操向輪の取付けヨークをもつ二輪形静的又は振動ローラ
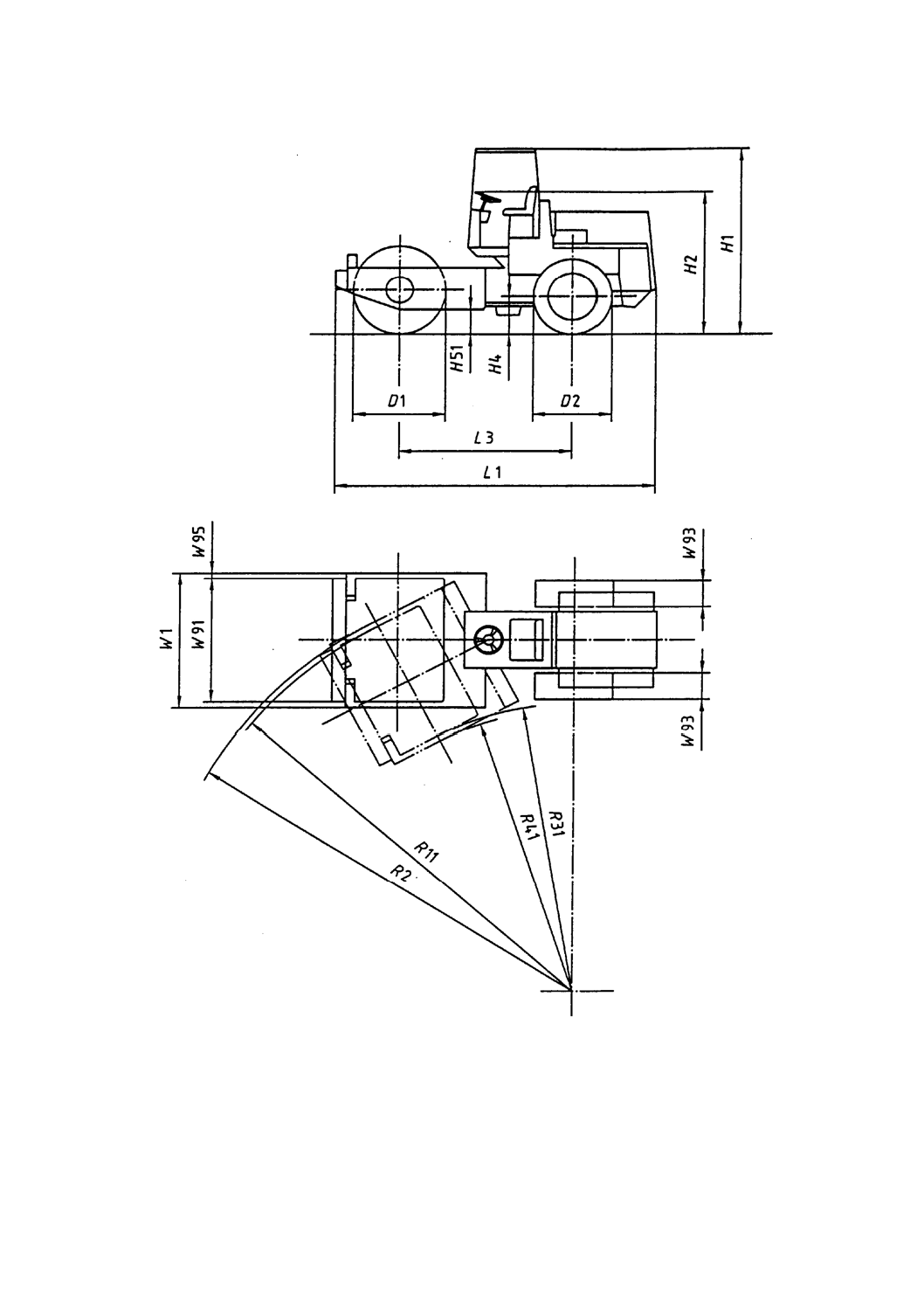
6.1.3
4.3.3及び4.3.10に関する寸法表示は,図15を参照する。
11
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図 15 一体フレームで前又は後に操向輪の取付けヨークをもつ三輪形静的又は振動ローラ
6.1.4
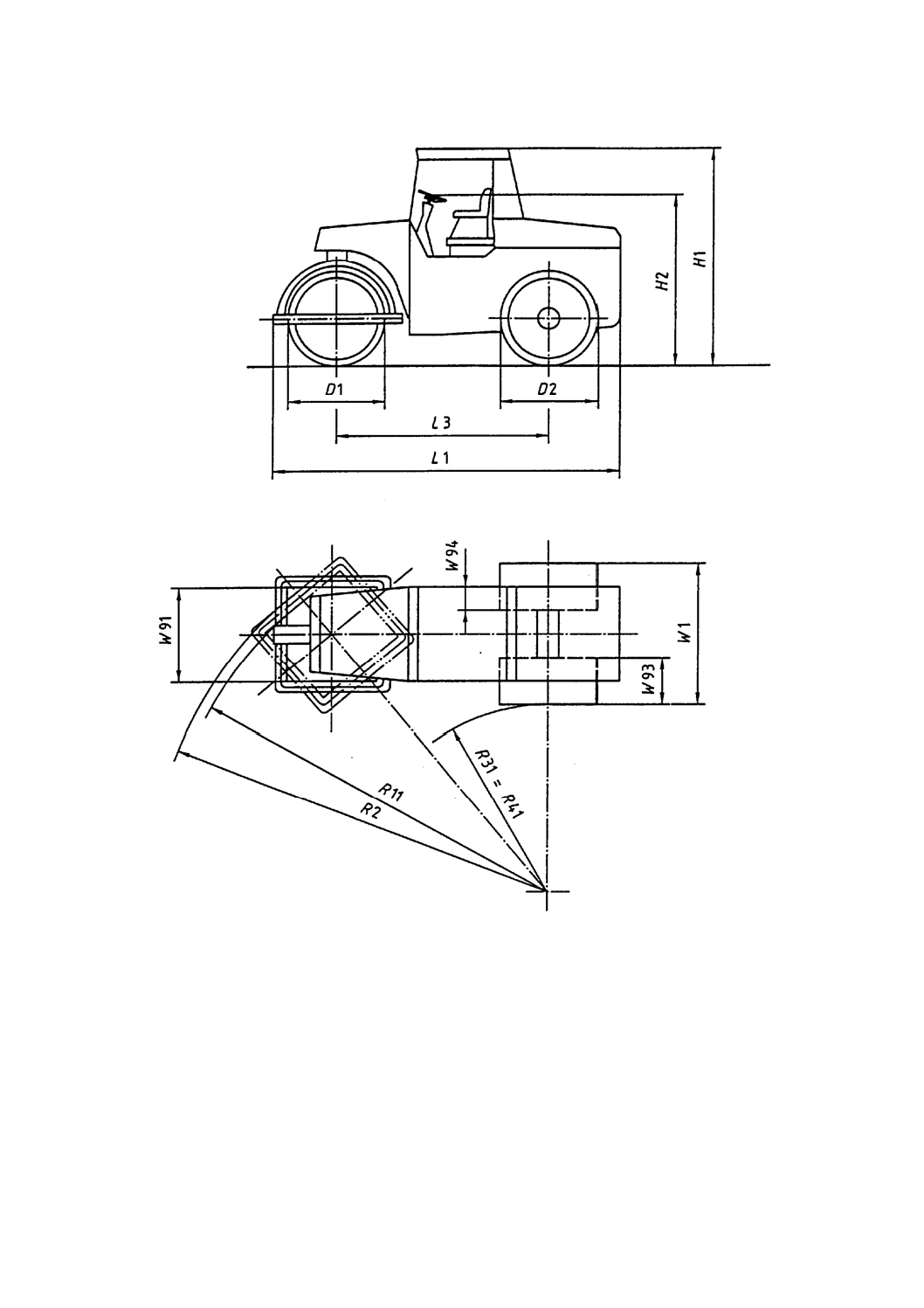
4.3.13に関する寸法表示は,図16を参照する。
12
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
図 16 車体屈折式単振動輪二駆動輪形振動ローラ
13
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
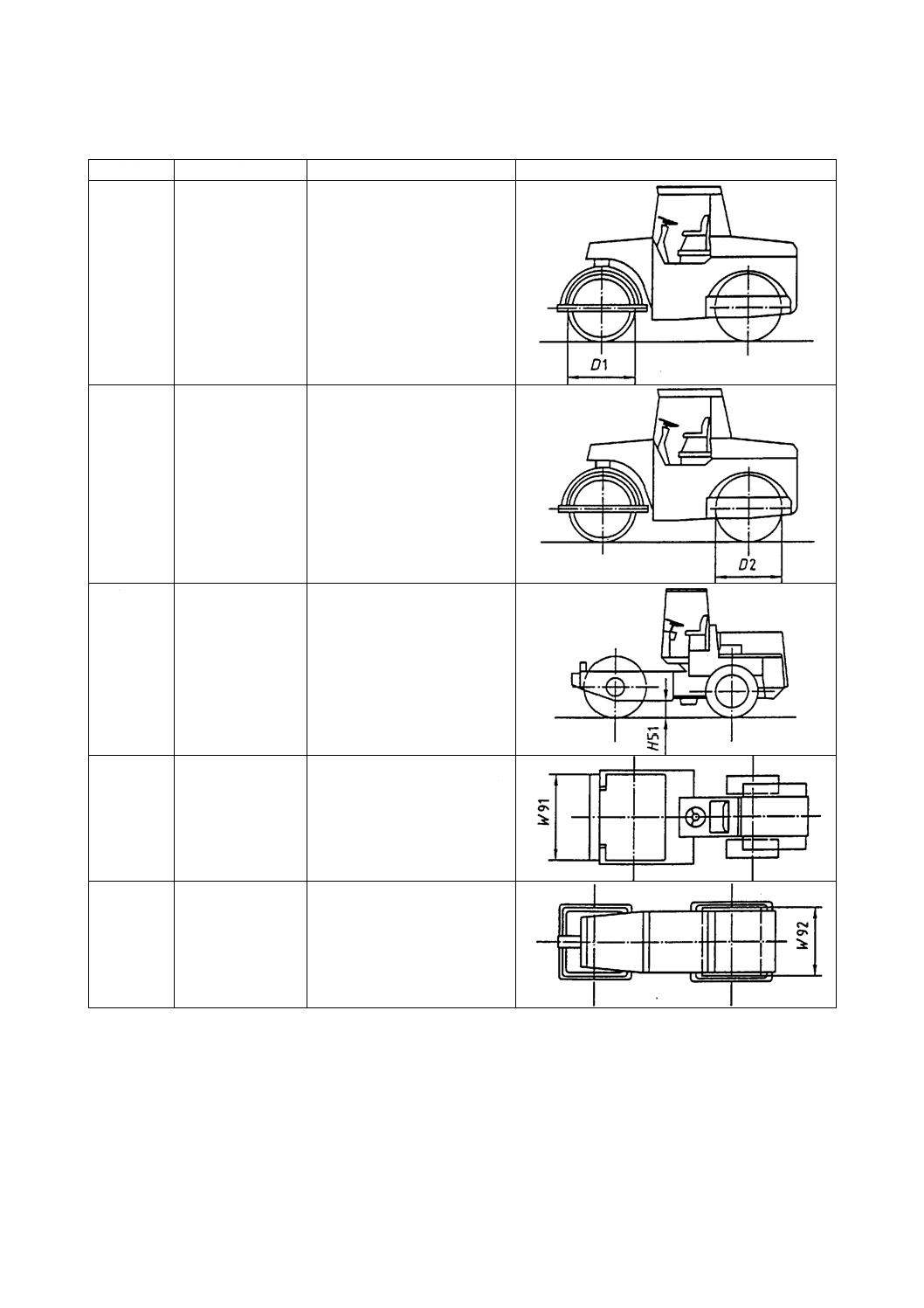
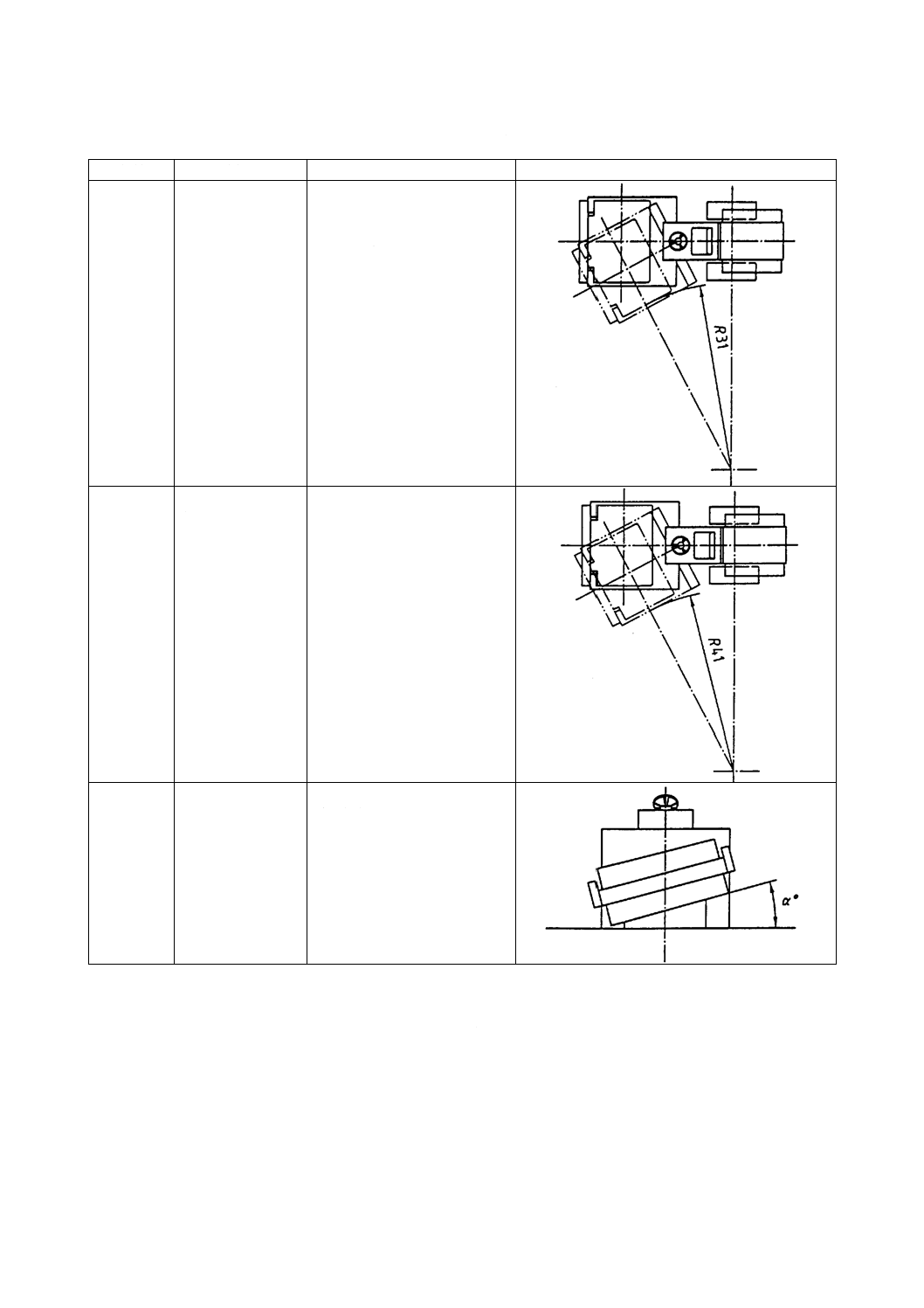
表 1 本体寸法の記号及び定義
記号
用語
定義
略図
D1
前輪直径
前輪中心を通る前輪表面直径
外側間のX座標上の距離
D2
後輪直径
後輪中心を通る後輪表面直径
外側間のX座標上の距離
H51
カーブクリアラン
ス
鉄輪外側のシャシ最下部と基
準地表面(GRP)とのZ座標上の
距離
W91
前輪幅
前輪の外側の最外点を通る二
つのY平面間のY座標上の距離
W92
後輪幅
後輪の外側の最外点を通る二
つのY平面間のY座標上の距離
14
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
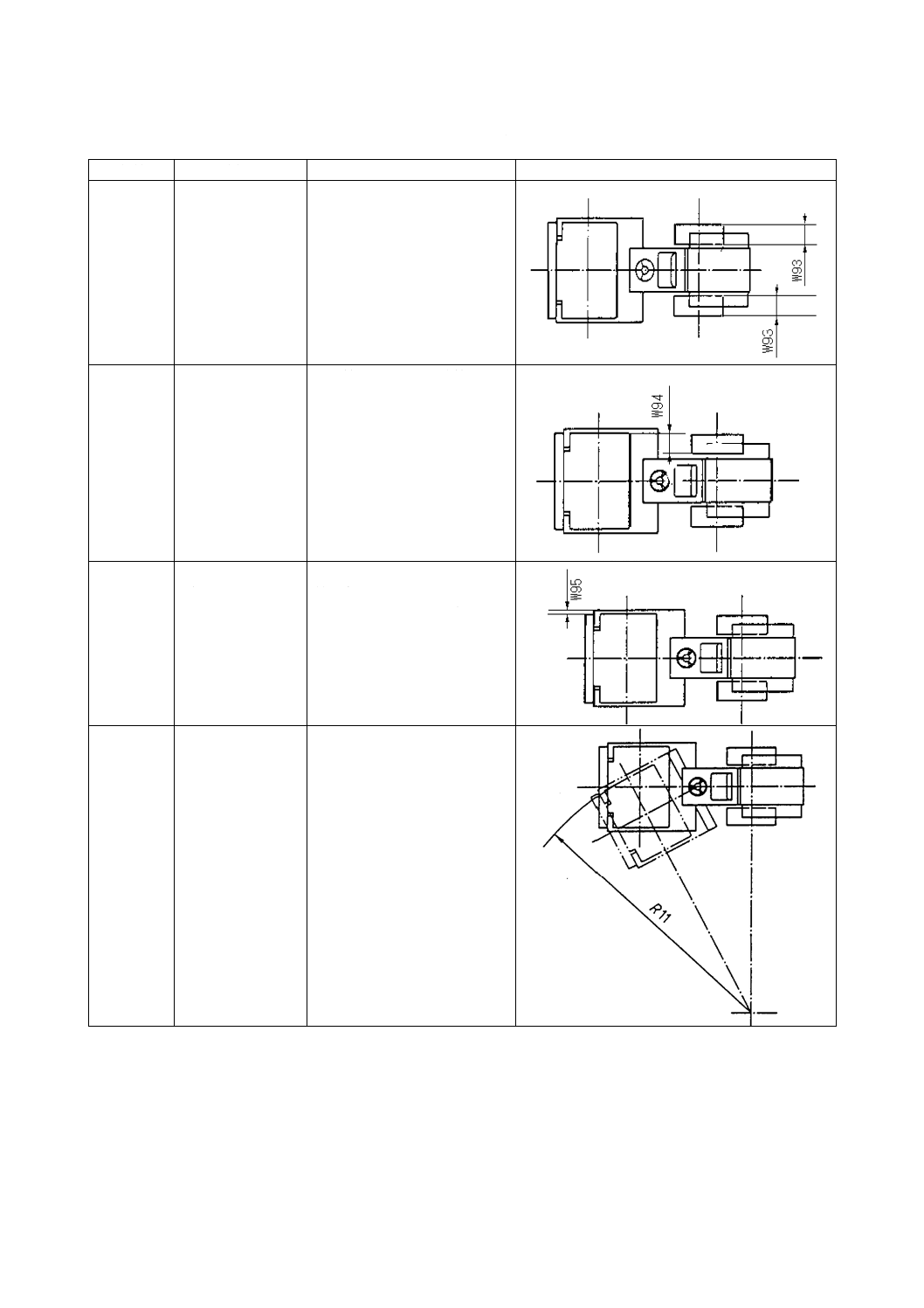
表 1 本体寸法の記号及び定義(続き)
記号
用語
定義
略図
W93
後輪幅(二輪)
後輪の最外点を通る二つのY平
面間のY座標上の距離
W94
オーバラップ(二
輪)
後二輪式ローラで,前輪外側を
通るY平面と後輪の内側を通る
Y平面との間のY座標上の距離
W95
サイドオーバハン
グ
同一側の鉄輪外側端と機械の
最外点をそれぞれ通る二つのY
平面間のY座標上の距離
R11
締固め表面の外側
回転半径
機械が最小の回転を行ったと
き,その回転中心と前輪の外側
軌跡との間のZ平面上の距離
15
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
表 1 本体寸法の記号及び定義(続き)
記号
用語
定義
略図
R31
締固め表面の内側
回転半径
機械が最小の回転を行ったと
き,その回転中心と前後輪いず
れかの最内側軌跡との間のZ平
面上の距離
R41
機械最内側回転半
径
機械が最小の回転を行ったと
き,その回転中心と機械及び作
業装置の最内点との間のZ平面
上の距離
α
フレームチルト量
X平面内のZ軸方向に対する前
輪の傾斜可能運動量(±)
6.2
アタッチメント
6.2.1
図17及び図18の寸法の定義及び記号は,JIS A 8411-2及び表2を適用する。
16
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
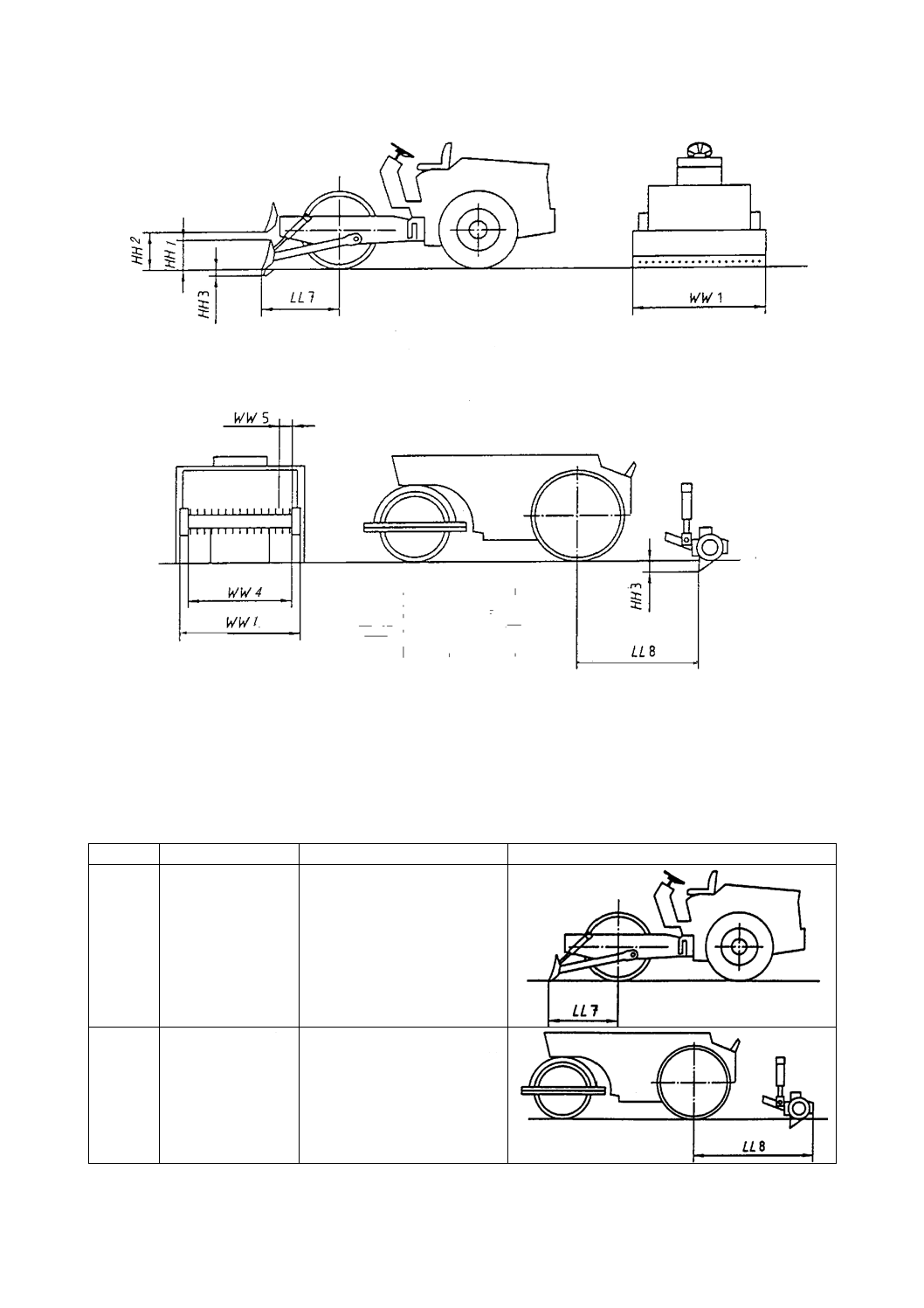
図 17 排土用ブレード
図 18 スカリファイヤ
6.2.2
締固め機械に直接関係する寸法の定義及び記号は,表2に示すものを適用する。
表 2 アタッチメントの寸法及び記号
単位 mm
記号
用語
定義
略図
LL7
前部オーバハング
アタッチメントをGRP上に置
いたとき,アタッチメントの最
前点及び前輪の中心線を通る
二つのX平面間のX座標上の
距離
LL8
後部オーバハング アタッチメントをGRP上に置
いたとき,アタッチメントの最
後点及び後輪の中心線を通る
二つのX平面間のX座標上の
距離
17
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
7. エンジンネット軸出力 JIS D 0006-1を参照する。
8. 最高走行速度 すべての速度は水平堅土上における値である(JIS A 8319参照)。
8.1
ローラ バラストなし及び最大バラスト積載時の運転質量で,前進及び後進のすべての速度段につ
いて,その最高走行速度を表示する。
8.2
ランマ及び振動コンパクタ エンジン最高回転速度で,最高変速の時の最高走行速度を表示する。
9. 最大許容傾斜角 傾斜角は,機械がその設計時の能力を維持しながら,運転できる縦方向及び横方向
の傾斜角度である。
傾斜角度は,機械を平たんな硬い面に置いて測定する。実際のかじ取り角及び機械の右若しくは左又は
前若しくは後方向に対する傾斜角度について報告する(4.1参照)。
10. 登坂能力 最大登坂能力は,機械が坂路を自力で発進し,一定速度で走行しうる最高登坂角度で表示
する。
機械の最大登坂能力は,硬い凹凸のない地盤上で前進又は後進し,時々停止しながら測定する。ドラム,
タイヤなどの滑り限界は,実際の登坂能力と見なし,地盤の粘着係数を表示する。
11. 仕様項目
11.1 一般 この項は,製造業者がその仕様書の中に含めることが望ましい主要仕様項目を示す。
仕様項目では,国際単位系(SI単位)を用いなければならない。
11.2 質量及び荷重 次の項目は,機械の形式によって選択する。
a) 運転質量(すべての選択品つき)
b) 鉄輪軸重
c) 後輪軸重
d) タイヤ軸重
e) 前部静線圧
f)
後部静線圧
g) タイヤ荷重
11.3 寸法 次の項目は,機械の寸法について記述する。
a) 前部作業幅
b) 後部作業幅
c) 全幅
d) 全長
e) 全高
11.4 運転性能
a) 前進速度
b) 後進速度
c) 最大外側回転半径
d) 無振動時の最大登坂能力
e) 振動時の最大登坂能力
f)
ステアリング角度
g) 搖動角度
11.5 振動系統 次の項目は,振動系統について記述する。
18
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
a) 振動数
b) 振幅
c) 起振力
11.6 鉄輪及び/又はタイヤ 次の項目は,鉄輪及び/又はタイヤについて記述する。
a) フラットドラム
b) パッドフートドラム
c) 鉄輪幅
d) 鉄輪直径
e) パットフートの数
f)
ロール板厚
g) タイヤサイズ
11.7 駆動系統
11.7.1 エンジン 次の項目は,エンジンについて記述する。
a) 製造業者
b) 型式
c) 燃料の種類
d) 冷却方式
e) 性能( JIS D 0006-1参照)
f)
シリンダ数
g) 内径
h) 行程
i)
電気系統
11.7.2 変速機 次の項目は,適用される変速機について記述する。
a) 遠心クラッチ付き又はなしの手動シフト式
b) トルクコンバータ付きのパワーシフト式
c) ハイドロスタティク式
d) 電気式
e) 前進及び後進の速度段数
11.8 ブレーキ系統 常用及び駐車ブレーキの形式について記述する。
11.9 系統別液体容量
a) 燃料
b) 水(撒水装置系統に対する)
c) 冷却水
d) 油圧系統
e) 終減速機
f)
エンジンオイル
g) 変速機
19
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書1(参考)JISと対応する国際規格との対比表
この附属書(参考)は,本体及び附属書(規定)に関連する事柄を補足するもので,規定の一部ではない。
JIS A 8424:2003 締固め機械―用語及び仕様項目
ISO 8811:2000,Earth-moving machinery―Rollers and compactors―Terminology
and commercial specifications
(Ⅰ) JISの規定
(Ⅱ) 国際
規格番号
(Ⅲ) 国際規格の規定
(Ⅳ) JISと国際規格との技術的差異
の項目ごとの評価及びその内容
表示箇所:本文の左側
表示方法:傍線
(Ⅴ) JISと国際規格との技術的差異の理由
及び今後の対策
項目
番号
内容
ISO 8811
項目
番号
内容
項目ごと
の評価
技術的差異の内容
1
適用範囲を規定
1
JISに同じ
IDT
−
−
2
引用規格を記載
2
JISに同じ
IDT
−
−
3
各箇条で主要な用語を定
義
3
下記を除きJISに同じ MOD/変
更
3.1,3.2及び3.3の各
箇条に変更あり
3.1
各箇条で締固め機械の一
般の用語を定義
3.1
下記を除きJISに同じ MOD/変
更
3.1.8に変更あり
−
3.1.8
バラストの定義を記述
3.1.8
カウンタウェイトの
定義を記述
MOD/変
更
JISはバラストを定義
しているのに対し,
ISOはカウンタウェイ
トを定義
締固め機械では,転圧のために機械の
総質量を増やすためバラストを使用す
るが,カウンタウェイトは使用しない
ので,ISOは誤記と考えられ,JISでは
これを修正する。今後ともISO修正提
案を行う
3.2
各箇条で質量及び振動に
関する用語を定義
3.2
下記を除きJISに同じ MOD/変
更
3.2.7に変更あり。
−
3.2.7
偏心モーメント(質量)の
定義を記述
3.2.7
偏心モーメントの定
義を記述
MOD/追
加
ISOでは“偏心モーメ
ント”といいつつ力で
はないので,JISでは
用語に“(質量)”を付
記
ISOの“偏心モーメント”は,通常の
意味のモーメントではなく質量にモー
メントアームを乗じたものなのでその
ままでは不具合であり“(質量)”を付
記。今後ともISO修正提案を行う。

20
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書表 1 附属書1(参考) JISと対応する国際規格との対比表(続き)
JIS A 8424:2003 締固め機械―用語及び仕様項目
ISO 8811:2000,Earth-moving machinery―Rollers and compactors―Terminology
and commercial specifications
(Ⅰ) JISの規定
(Ⅱ) 国際
規格番号
(Ⅲ) 国際規格の規定
(Ⅳ) JISと国際規格との技術的差異
の項目ごとの評価及びその内容
(Ⅴ) JISと国際規格との技術的差異の理由
及び今後の対策
項目
番号
内容
項目
番号
内容
項目ごと
の評価
技術的差異の内容
3.2.8
起振力の定義を記述
3.2.8
起振力の定義を記述
MOD/追
加
3.2.7に合わせ定義文
中でISOでは“偏心モ
ーメント”といいつつ
力ではないので,JIS
では“(質量)”を付記
3.2.7の反映
3.3
各箇条で線圧及び面圧に
関する用語を定義
3.3
下記を除きJISに同じ MOD/変
更
3.3.1を変更
−
3.3.1
線圧を定義
3.3.1
線圧を定義
MOD/変
更
ISOは用語としては線
圧と言いながら線分
布質量を定義してお
り不具合,JISでは用
語の英文に”force”を
付記し定義文にて質
量に重力加速度を乗
じたものである旨記
述
ISOは用語としては線圧と言いながら
線分布質量を定義しており不具合なの
でJISでは単位長さ当たりの力として
定義。今後ともISO修正提案を行う。
4
本体の各形式などを記述
4
JISに同じ
IDT
(各箇条で説明的文
言を参考として付
記。)
−
5
各部の名称を記述
5
JISに同じ
IDT
−
−
6
各部の寸法及びその記号
を記述
6
JISに同じ
IDT
−
−
7
エンジンネット軸出力に
関して記述
7
JISに同じ
IDT
−
−
8
最高走行速度に関して記
述
8
JISに同じ
IDT
−
−
21
A 8424:2003
2019年7月1日の法改正により名称が変わりました。まえがきを除き,本規格中の「日本工業規格」を「日本産業規格」に読み替えてください。
附属書表 1 附属書1(参考) JISと対応する国際規格との対比表(続き)
JIS A 8424:2003 締固め機械―用語及び仕様項目
ISO 8811:2000,Earth-moving machinery―Rollers and compactors―Terminology
and commercial specifications
(Ⅰ) JISの規定
(Ⅱ) 国際
規格番号
(Ⅲ) 国際規格の規定
(Ⅳ) JISと国際規格との技術的差異
の項目ごとの評価及びその内容
(Ⅴ) JISと国際規格との技術的差異の理由
及び今後の対策
項目
番号
内容
項目
番号
内容
項目ごと
の評価
技術的差異の内容
9
最大許容傾斜角に関して
記述
9
JISに同じ
IDT
−
−
10
登坂能力に関して記述
10
JISに同じ
IDT
−
−
11
仕様項目に関して記述
11
JISに同じ
IDT
−
−
JISと国際規格との対応の程度の全体評価:MOD
備考1. 項目ごとの評価欄の記号の意味は,次のとおりである。
― IDT……………… 技術的差異がない。
― MOD/削除……… 国際規格の規定項目又は規定内容を削除している。
― MOD/追加……… 国際規格にない規定項目又は規定内容を追加している。
― MOD/変更……… 国際規格の規定内容を変更している。
― MOD/選択……… 国際規格の規定内容と別の選択肢がある。
― NEQ…………… 技術的差異があり,かつ,それがはっきりと識別され説明されていない。
2.
JISと国際規格との対応の程度の全体評価欄の記号の意味は,次のとおりである。
― IDT……………… 国際規格と一致している。
― MOD…………… 国際規格を修正している。
― NEQ…………… 技術的内容及び構成において,国際規格と同等でない。